") 運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程
運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程
本文導(dǎo)讀
今天,正運(yùn)動(dòng)小助手給大家分享一下如何使用C#上位機(jī)編程實(shí)現(xiàn)運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)功能。
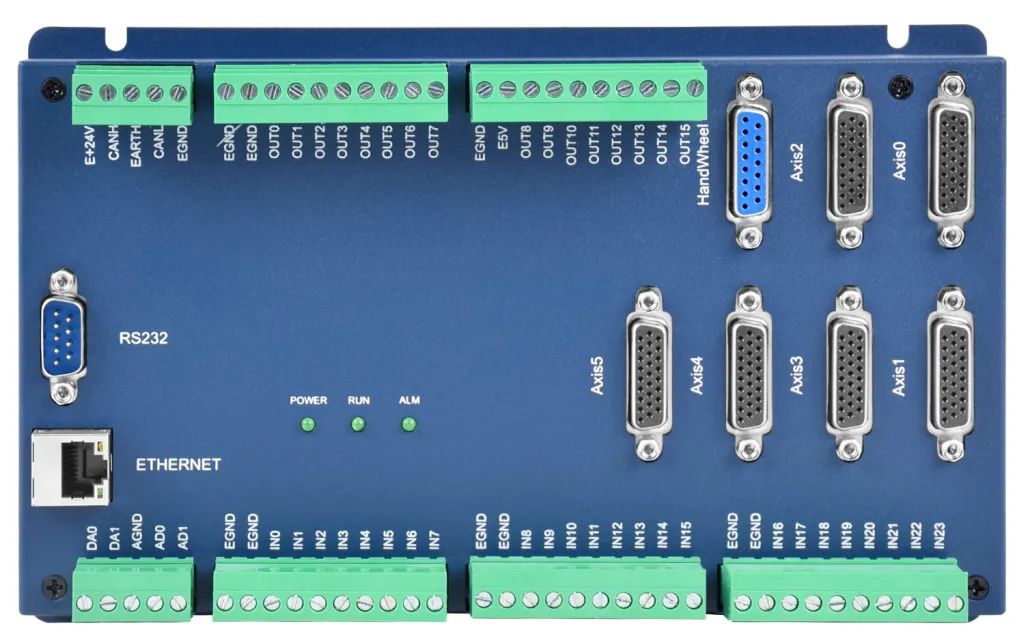
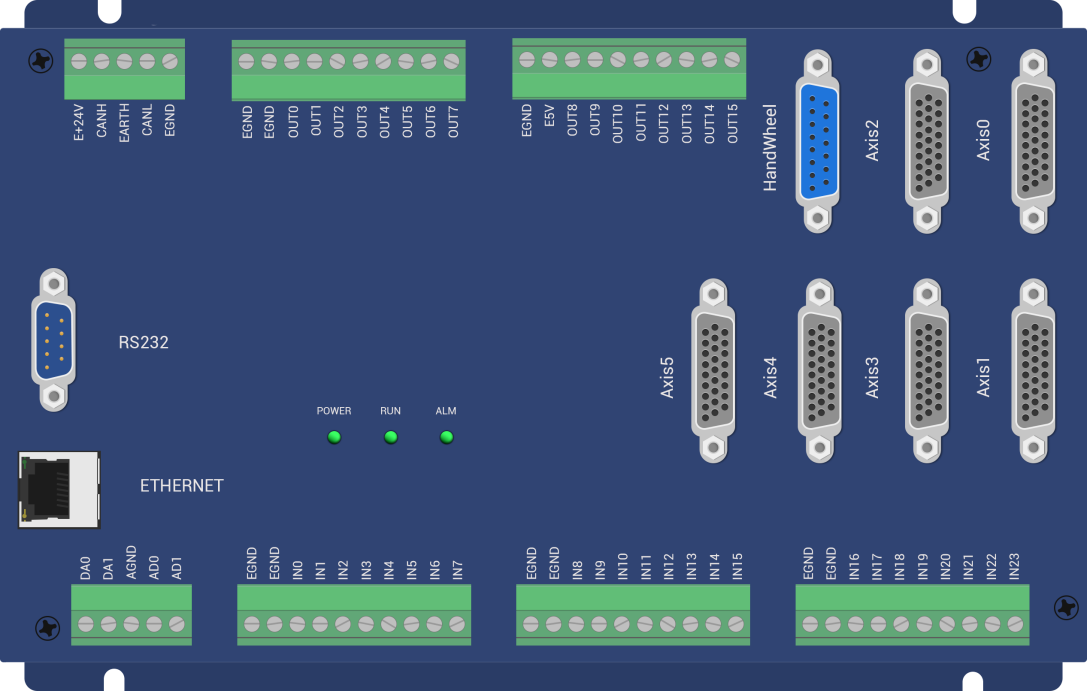
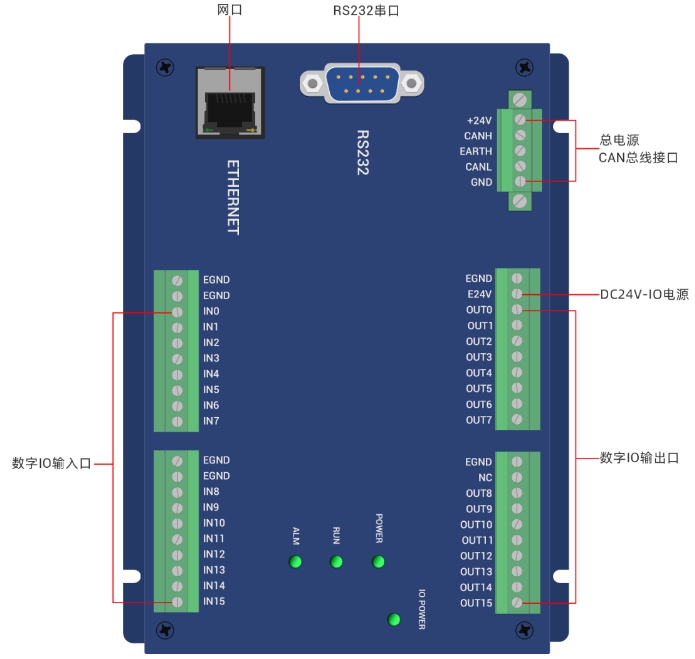
01 ECI2618B硬件介紹
ECI2618B經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡是一款脈沖型、模塊化的網(wǎng)絡(luò)型運(yùn)動(dòng)控制卡。控制卡本身最多支持6軸,可擴(kuò)展至12軸的運(yùn)動(dòng)控制,用以實(shí)現(xiàn)直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸以及機(jī)械手指令等簡單的軌跡控制需求;采用優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實(shí)現(xiàn)實(shí)時(shí)的運(yùn)動(dòng)控制。
ECI2618B控制卡功能特點(diǎn):
(1)本身支持6差分脈沖軸+4單端脈沖軸運(yùn)動(dòng)控制,最多可擴(kuò)展至12軸運(yùn)動(dòng)控制。
(2)脈沖輸出模式:脈沖/方向或雙脈沖。
(3)AXIS接口支持編碼器位置測(cè)量,可以配置為手輪輸入模式。
(4)專用的手輪輸入接口。
(5)每軸最大輸出脈沖頻率10MHz。
(6)通過CAN總線,最多可擴(kuò)展到256個(gè)隔離輸入口和256個(gè)隔離輸出口。
(7)軸正負(fù)限位信號(hào)口/原點(diǎn)信號(hào)口可以隨意配置到任何輸入口。
(8)通用數(shù)字輸出口最大輸出電流可達(dá)500mA,可直接驅(qū)動(dòng)部分電磁閥。
(9)支持點(diǎn)位運(yùn)動(dòng)、電子凸輪、直線插補(bǔ)、圓弧插補(bǔ)、連續(xù)插補(bǔ)運(yùn)動(dòng)、機(jī)械手指令。
(10)支持Basic多文件多任務(wù)編程。
(11)多種程序加密手段,保護(hù)客戶的知識(shí)產(chǎn)權(quán)。
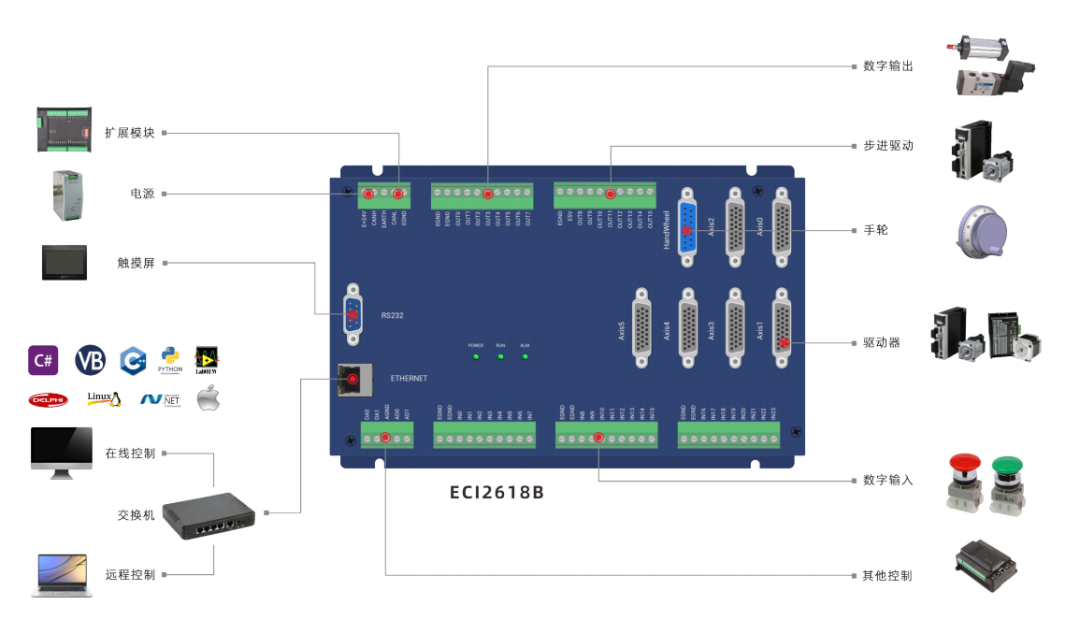
ECI2000系列經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備和流水線等12軸以內(nèi)脈沖應(yīng)用場(chǎng)合。
控制器支持windows、linux、Mac、Android、wince各種操作系統(tǒng)下的開發(fā),提供vc、c#、vb.net、labview等各種環(huán)境的dll庫,如下圖。上位機(jī)軟件編程參考《ZMotion PC函數(shù)庫編程手冊(cè)》。

02 為什么要進(jìn)行心跳檢測(cè),作用是什么
1.實(shí)時(shí)監(jiān)測(cè):
通過檢測(cè)上位機(jī)與下位機(jī)的通信狀態(tài),可以實(shí)時(shí)監(jiān)測(cè)上位機(jī)是否正常連接和通訊。一旦發(fā)現(xiàn)上位機(jī)掉線,系統(tǒng)可以及時(shí)采取相應(yīng)的應(yīng)對(duì)措施,避免因?yàn)榈艟€導(dǎo)致通訊中斷或數(shù)據(jù)丟失。
2.系統(tǒng)穩(wěn)定性:
上位機(jī)是控制系統(tǒng)的核心部分,掉線可能會(huì)導(dǎo)致整個(gè)系統(tǒng)失去控制。掉線檢測(cè)可以保障系統(tǒng)的穩(wěn)定性,及時(shí)發(fā)現(xiàn)掉線情況并進(jìn)行處理,保持系統(tǒng)正常運(yùn)行。
3.數(shù)據(jù)完整性:
上位機(jī)通常負(fù)責(zé)與用戶界面交互、數(shù)據(jù)處理和決策,數(shù)據(jù)的完整性對(duì)系統(tǒng)運(yùn)行至關(guān)重要。通過掉線檢測(cè),系統(tǒng)可以及時(shí)發(fā)現(xiàn)掉線情況,保證數(shù)據(jù)的完整性和準(zhǔn)確性。
4.故障診斷:
掉線檢測(cè)可以作為系統(tǒng)故障診斷的一種手段,通過監(jiān)測(cè)上位機(jī)的狀態(tài),可以幫助確定系統(tǒng)出現(xiàn)問題的具體原因,加快故障排查和修復(fù)的速度。
03 BASIC語言進(jìn)行心跳檢測(cè)腳本語言編寫
(一)前情提要
心跳檢測(cè)的實(shí)現(xiàn)主要是兩個(gè)部分組成:
1.上位機(jī)周期修改變量;
2.控制器程序周期檢測(cè)變量并在掉線的時(shí)候執(zhí)行一些急停操作。
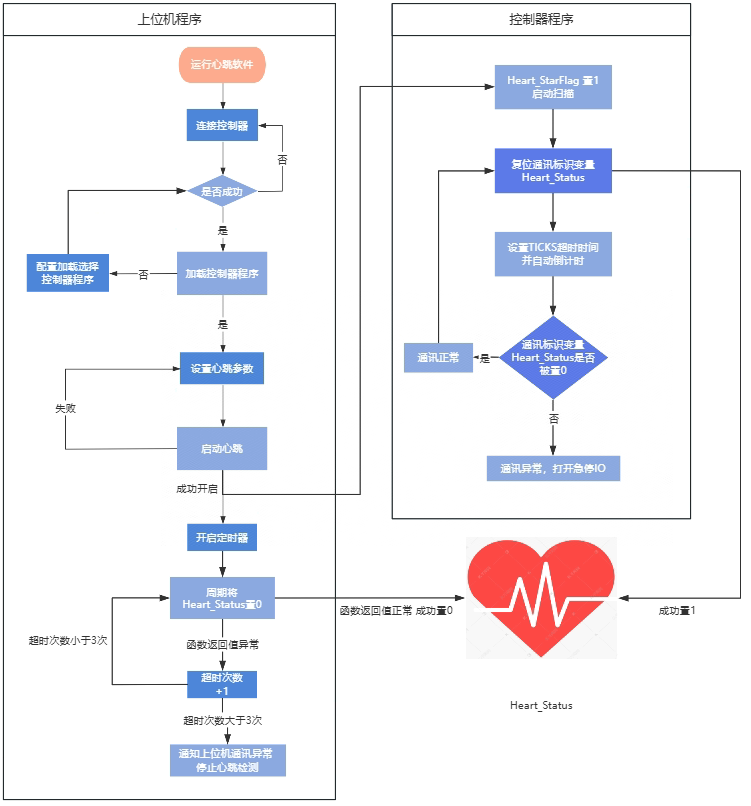
在示例中,上位機(jī)程序會(huì)周期修改Heart_Status,控制器程序會(huì)周期掃描Heart_Status,并在檢測(cè)到變量的值異常的時(shí)候打開輸出口,模擬掉線急停的操作。
流程圖如下所示:
(二)創(chuàng)建變量
'**************************心跳相關(guān)變量定義************************ GlobalHeart_StarFlag'開始通訊標(biāo)識(shí)變量 Global Heart_Status '通訊標(biāo)識(shí)變量 GlobalHeart_Time'心跳超時(shí)時(shí)間 GlobalHeart_OutNum'急停OP數(shù)量 GlobalOutList_Address'急停OUTmodbus_long起始地址(Ps:3系列以下,自定義變量為24位浮點(diǎn)數(shù),32位精度丟失,用modbus_long來代替) GLOBAL CONST cVer=CONTROL Heart_StarFlag =-1 Heart_Status = 0 Heart_OutNum = 10 OutList_Address =0 dim i,j
(三)開啟掃描
掃描流程:
等待上位機(jī)發(fā)送掃描開始指令;
根據(jù)控制器信號(hào)進(jìn)入不同掃描程序(原理一樣只是實(shí)現(xiàn)略有不同);
將通訊標(biāo)識(shí)變量置1;
等待一個(gè)超時(shí)時(shí)間;
判斷通訊標(biāo)識(shí);
如果為1表示上位機(jī)沒有進(jìn)行通訊,掉線狀態(tài)。進(jìn)行掉線保護(hù)操作;
為0表示進(jìn)行通訊,正常狀態(tài)。開啟下一次掃描。
WHILE TRUE
WAIT until Heart_StarFlag = 1 '等待PC軟件連接
DELAY Heart_Time 'PC連接之后,延時(shí)一個(gè)超時(shí)時(shí)間,避免上位
WHILE TRUE
ifHeart_Status=0thenHeart_Status=1 '等待PC上修改通訊變量
ticks=Heart_Time'超時(shí)判斷處理,等待PC上修改Heart_Flag=0
WAIT until ticks < 0 or Heart_Status=0
if Heart_Status = 1 THEN
RAPIDSTOP(2)
WAIT IDLE
OP(0,31,MODBUS_LONG(OutList_Address)) 'MODBUS_LONG存儲(chǔ)32位整型按位控制掉線急停IO
Heart_StarFlag=-1
Heart_Status = 0 ELSE
OP(0,31,0)
Endif
????WEND
WEND
end
04 C#語言進(jìn)行心跳檢測(cè)開發(fā)
(一)新建WinForm項(xiàng)目并添加函數(shù)庫
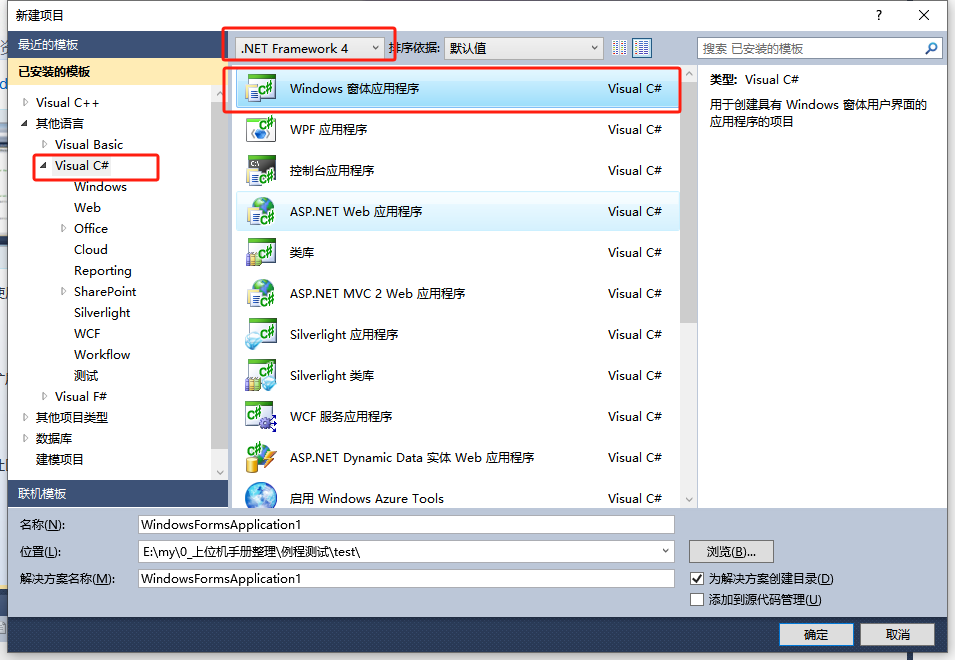
1.在VS2010菜單“文件”→“新建”→“項(xiàng)目”,啟動(dòng)創(chuàng)建項(xiàng)目向?qū)А?/p>
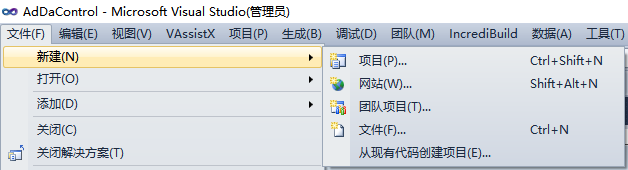
2.選擇開發(fā)語言為“Visual C#”和.NET Framework 4以及Windows窗體應(yīng)用程序。
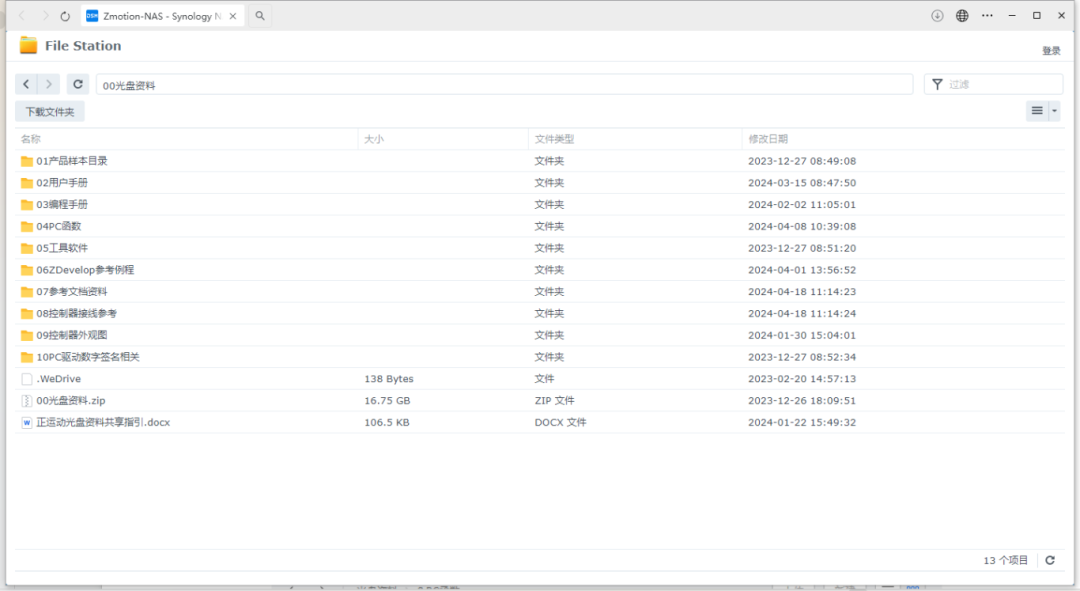
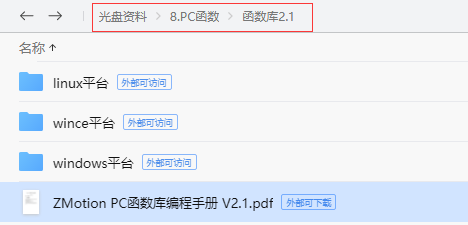
3.找到廠家提供的光盤資料里面的C#函數(shù)庫,路徑如下(32位庫為例)。
(1)進(jìn)入廠商提供的光盤資料找到“04PC函數(shù)”文件夾,并點(diǎn)擊進(jìn)入。
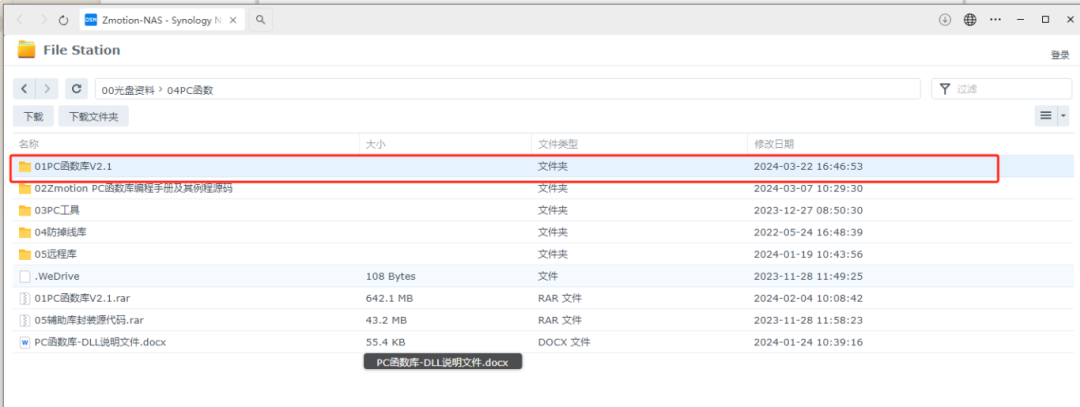
(2)選擇“01PC函數(shù)庫V2.1”文件夾。
(3)選擇“windows平臺(tái)”文件夾。
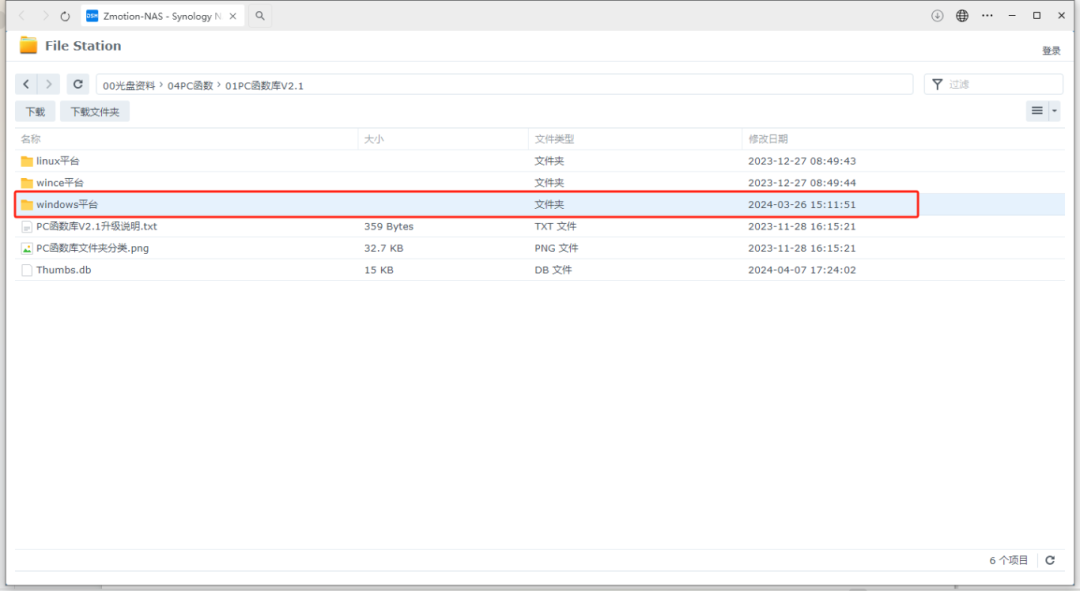
(4)根據(jù)需要選擇對(duì)應(yīng)的函數(shù)庫,這里選擇32位庫。
(5)解壓C#壓縮包,里面有C#對(duì)應(yīng)的函數(shù)庫。
(6)函數(shù)庫具體路徑如下。
4.將廠商提供的C#的庫文件以及相關(guān)文件復(fù)制到新建的項(xiàng)目中。
(1)將Zmcaux.cs文件復(fù)制到新建的項(xiàng)目里面中。
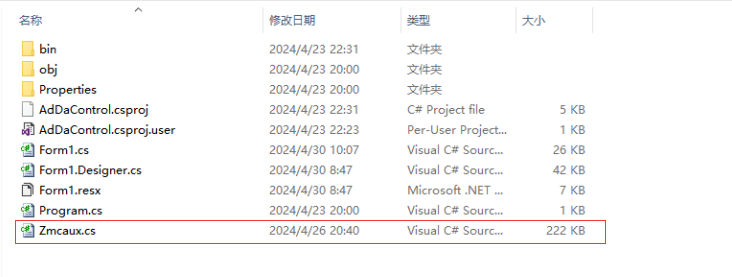
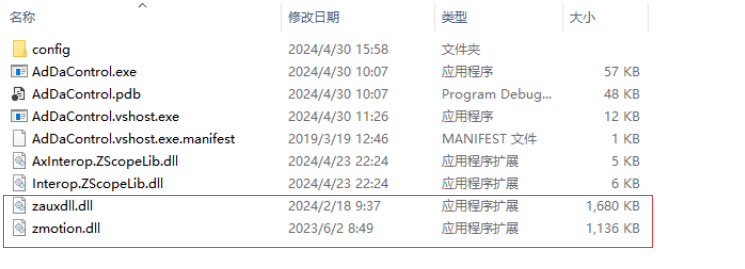
(2)將zauxdll.dll和zmotion.dll文件放入bindebug文件夾中。
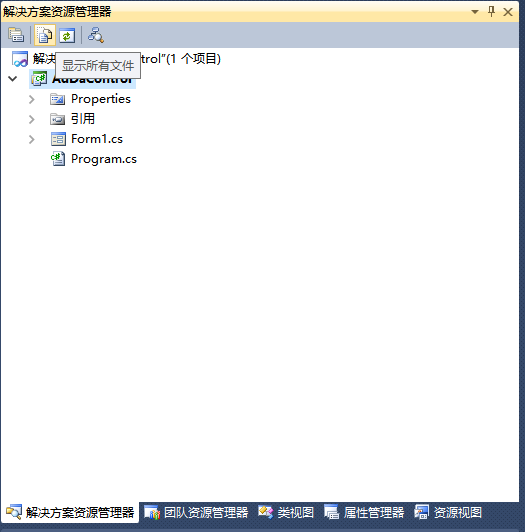
5.用vs打開新建的項(xiàng)目文件,在右邊的解決方案資源管理器中點(diǎn)擊“顯示所有文件”,然后鼠標(biāo)右擊Zmcaux.cs文件,點(diǎn)擊“包括在項(xiàng)目中”。

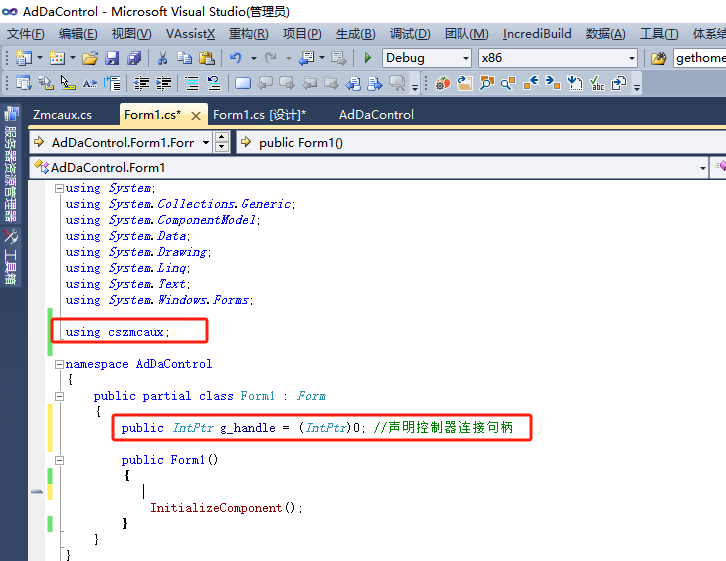
6.雙擊Form1.cs里面的Form1,出現(xiàn)代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
(二)PC函數(shù)介紹
1.PC函數(shù)手冊(cè)可在光盤資料查看,具體路徑如下。
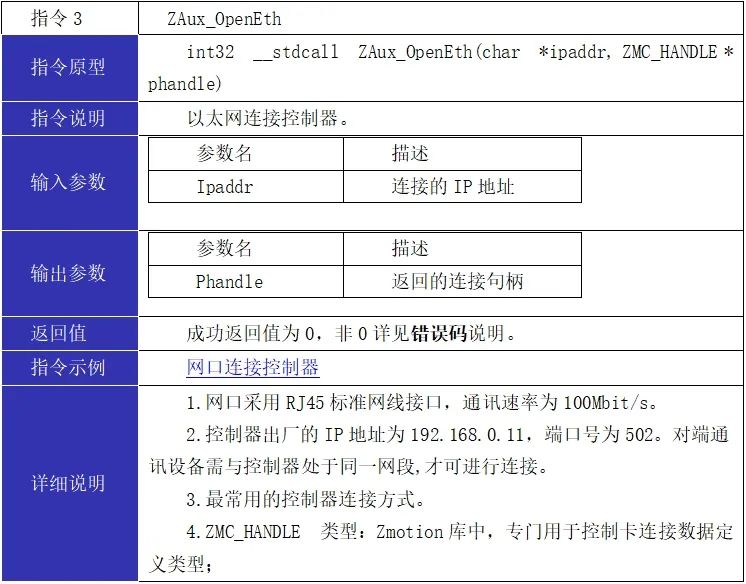
2.鏈接控制器,獲取鏈接句柄。
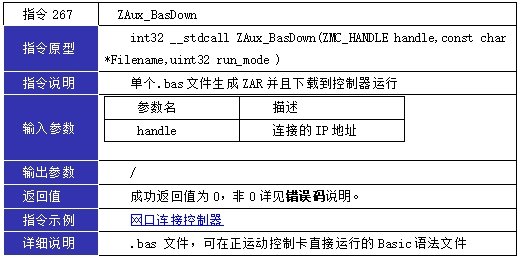
3.下載并運(yùn)行控制器程序。
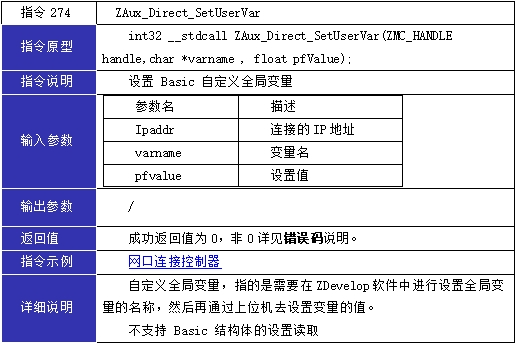
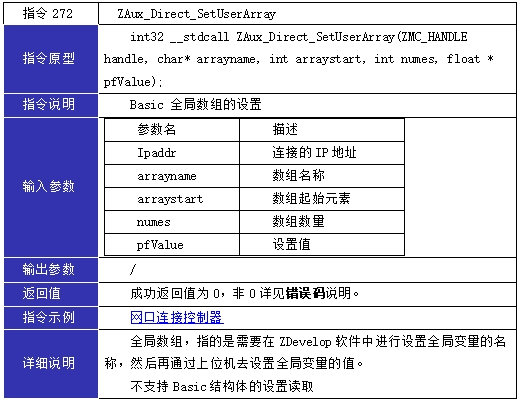
4.設(shè)置控制器程序參數(shù)。
05 C#例程建設(shè)之網(wǎng)絡(luò)通訊的心跳檢測(cè)
(一)前情提要
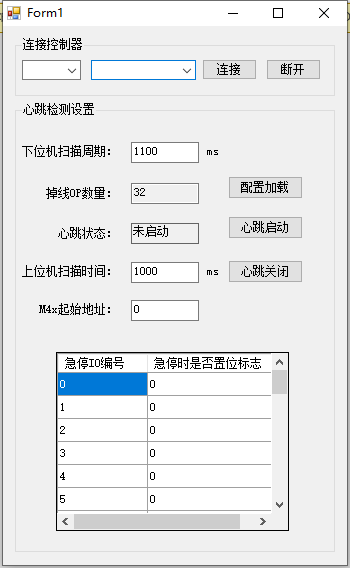
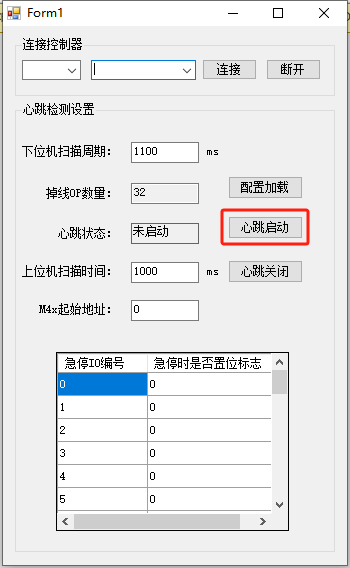
上位機(jī)軟件的主要功能:
1.下載并運(yùn)行控制器程序;
2.設(shè)置掃描參數(shù);
3.開啟和關(guān)閉心跳檢測(cè);
4.設(shè)置急停IO。
界面如下圖所示:
(二)例程講解
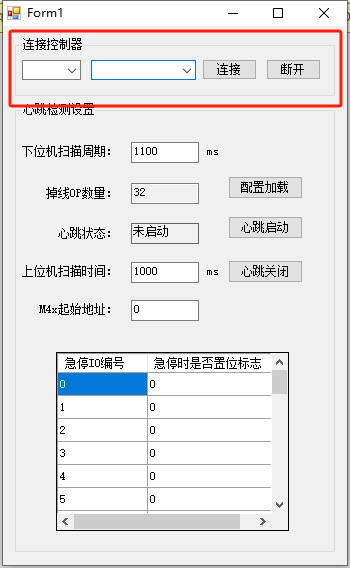
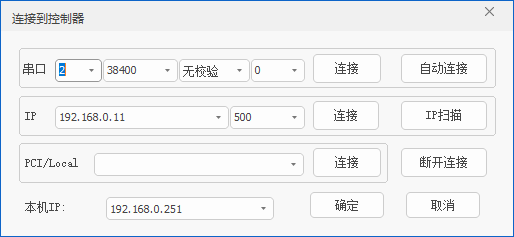
1.連接控制器獲取句柄,上位機(jī)操作通過獲取到的句柄來操作控制器。
//連接控制器,控制器默認(rèn)IP是192.168.0.11
ZauxErr = zmcaux.ZAux_OpenEth("192.168.0.11", out g_Handle);
if (0 != ZauxErr)
{
AlmInifFile.Write(DateTime.Now.ToString("F"), "ZAux_OpenEth執(zhí)行錯(cuò)誤,錯(cuò)誤碼:" + ZauxErr.ToString(), "錯(cuò)誤碼信息");
}
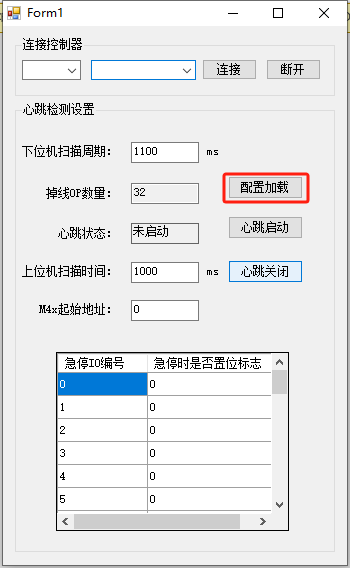
2.下載心跳bas程序
函數(shù)介紹:
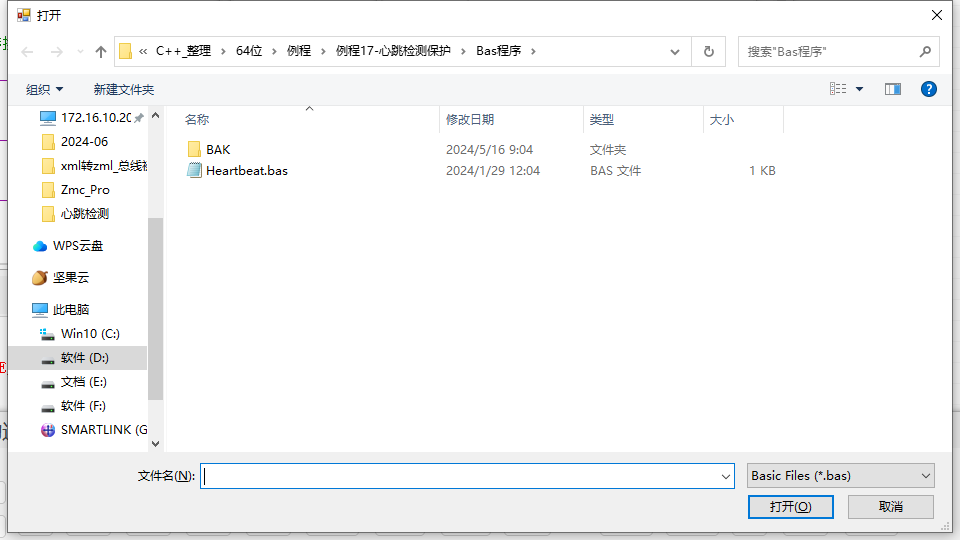
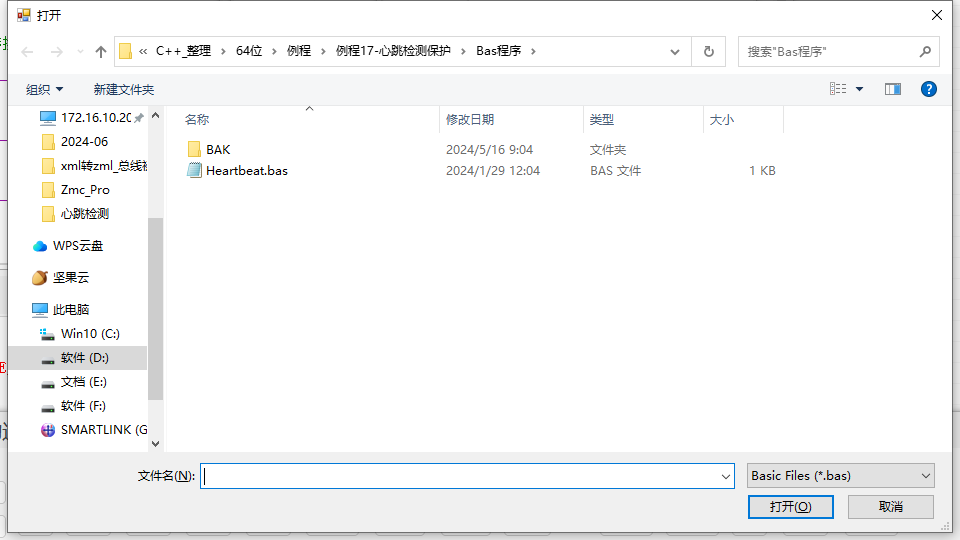
通過OpenFileDialog獲取控制器程序路徑,然后通過openFile判斷文件是否為空,最后通過ZAux_BasDown將控制器程序下載到控制器。
private void btnFile_Click(object sender, EventArgs e)
{
string m_strOpenFileName;
FileStream openFile;
OpenFileDialog fileOpen = new OpenFileDialog();
fileOpen.Filter = "Basic Files (*.bas)|*.bas|All Files (*.*)|*.*";
fileOpen.RestoreDirectory = true;
fileOpen.FilterIndex = 1;
if (fileOpen.ShowDialog() == DialogResult.OK)
{
m_strOpenFileName = fileOpen.FileName;
try{
openFile = new FileStream(fileOpen.FileName, FileMode.Open, FileAccess.Read);
openFile.Close();
}
catch (Exception ex)
{
MessageBox.Show("Open Failed!");
return;
}
ret = zmcaux.ZAux_BasDown(g_handle, m_strOpenFileName, 0);
controlReturnQue.Enqueue(ret);
if (ret == 0)
MessageBox.Show("心跳程序已成功加載");
}
}
3.啟動(dòng)心跳檢測(cè)
函數(shù)介紹:
首先通過SetTimeOutPara設(shè)置掃描參數(shù),然后ZAux_Direct_SetUserVar設(shè)置Heart_StarFlag心跳標(biāo)示變量。啟動(dòng)控制器掃描程序,隨后開啟上位機(jī)掃描程序。
private void btnStart_Click(object sender, EventArgs e)
{
SetTimeOutPara();
ret = zmcaux.ZAux_Direct_SetUserVar(g_handle, "Heart_StarFlag", 1);
controlReturnQue.Enqueue(ret);
timeOut = 0;
timer1.Enabled = true;
timer1.Interval = int.Parse(tbxUpTimer.Text);
tbState.Text = "已啟動(dòng)";
}
//上位機(jī)掃描程序
private void timer1_Tick(object sender, EventArgs e)
{
ret = zmcaux.ZAux_Direct_SetUserVar(g_handle, "Heart_Status", 0);
controlReturnQue.Enqueue(ret);
if (ret != 0)
timeOut++;
if (timeOut > 1)
{
tbState.Text = "未啟動(dòng)";
timer1.Stop();
}
}
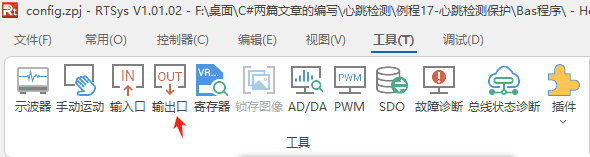
4.RTSys的使用
(1)打開【RTSys】軟件,點(diǎn)擊【連接】輸入控制器的IP(默認(rèn)IP:192.168.0.11)。

(2)打開輸出口界面,即可通過輸出口觀察是否掉線。
(三)教學(xué)視頻
教學(xué)視頻可點(diǎn)擊→“教學(xué)視頻:運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程”查看。
本次,正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程,就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來源。
審核編輯 黃宇
-
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
581瀏覽量
32863 -
上位機(jī)
+關(guān)注
關(guān)注
27文章
942瀏覽量
54795 -
運(yùn)動(dòng)控制卡
+關(guān)注
關(guān)注
7文章
112瀏覽量
15455 -
運(yùn)動(dòng)控制系統(tǒng)
+關(guān)注
關(guān)注
0文章
91瀏覽量
14150 -
正運(yùn)動(dòng)技術(shù)
+關(guān)注
關(guān)注
0文章
101瀏覽量
394
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程 #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制卡 #正運(yùn)動(dòng) #運(yùn)動(dòng)控制
運(yùn)動(dòng)控制卡周期上報(bào)實(shí)時(shí)數(shù)據(jù)IO狀態(tài)之C++篇

運(yùn)動(dòng)控制看的更清楚細(xì)致!RTSys示波器功能簡介 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制系統(tǒng) #運(yùn)動(dòng)控制卡
以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試
PCIe實(shí)時(shí)運(yùn)動(dòng)控制卡的雙盤視覺篩選機(jī)上位機(jī)開發(fā)應(yīng)用
PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡PCIE464的IO與編碼器讀寫應(yīng)用
運(yùn)動(dòng)控制卡伺服電機(jī)如何控制
運(yùn)動(dòng)控制卡/運(yùn)動(dòng)控制器的ZCAN總線ZMIO310擴(kuò)展模塊使用

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)(十四)

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)(十三)
PT/PVT運(yùn)動(dòng)模式介紹:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#人工智能
【正運(yùn)動(dòng)】高速高精,超高實(shí)時(shí)性的PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡 | PCIE464

項(xiàng)目工程下載與XML配置文件下載:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)
EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)(九)
單軸PSO視覺飛拍與精準(zhǔn)輸出:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開發(fā)(七)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論