") 無(wú)人機(jī)飛行控制器的組成部件和工作原理
無(wú)人機(jī)飛行控制器的組成部件和工作原理
作者 | 穹宇逐光
出品 | 聚翼無(wú)人機(jī)
1第一部分
基礎(chǔ)概念
飛控是什么?
多旋翼飛行控制器(Flight Controller, FC),是無(wú)人駕駛航空器(UAV)的核心組件之一。它充當(dāng)無(wú)人機(jī)的“大腦”,負(fù)責(zé)處理來(lái)自各種傳感器的數(shù)據(jù),并據(jù)此作出決策,以實(shí)現(xiàn)對(duì)無(wú)人機(jī)的姿態(tài)控制、導(dǎo)航以及任務(wù)執(zhí)行等功能。通過(guò)編程和算法優(yōu)化,飛行控制器能夠賦予無(wú)人機(jī)一定程度上的自主飛行能力,使其能夠在沒(méi)有人類直接干預(yù)的情況下完成特定任務(wù)。
組成部件
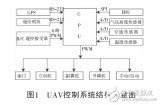
飛行控制器通常由以下幾個(gè)關(guān)鍵部分構(gòu)成:
● 傳感器:包括GPS模塊、慣性測(cè)量單元(IMU)、氣壓計(jì)等。這些設(shè)備用于感知無(wú)人機(jī)的位置、速度、高度及姿態(tài)等信息。
● 處理器:作為飛行控制器的大腦,處理器接收并處理來(lái)自各個(gè)傳感器的數(shù)據(jù),運(yùn)行必要的控制算法,并輸出控制指令給電機(jī)驅(qū)動(dòng)器(ESC)和其他外設(shè)。
● 接口電路:提供與其他硬件組件連接的橋梁,例如接收機(jī)、電源管理模塊、外部存儲(chǔ)器等。
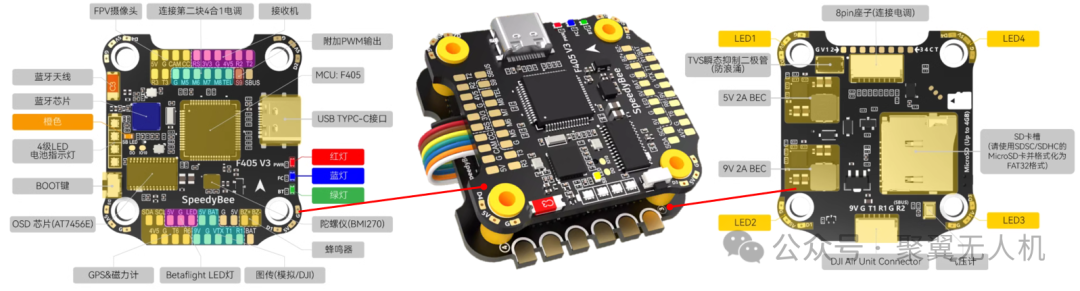
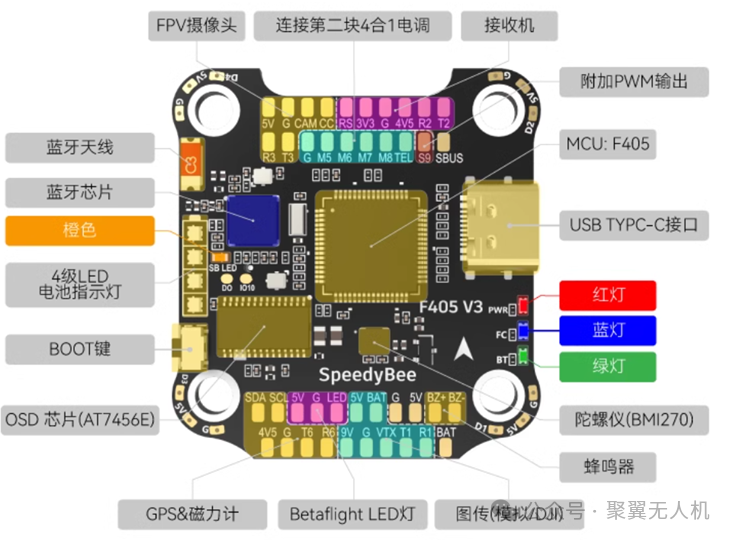
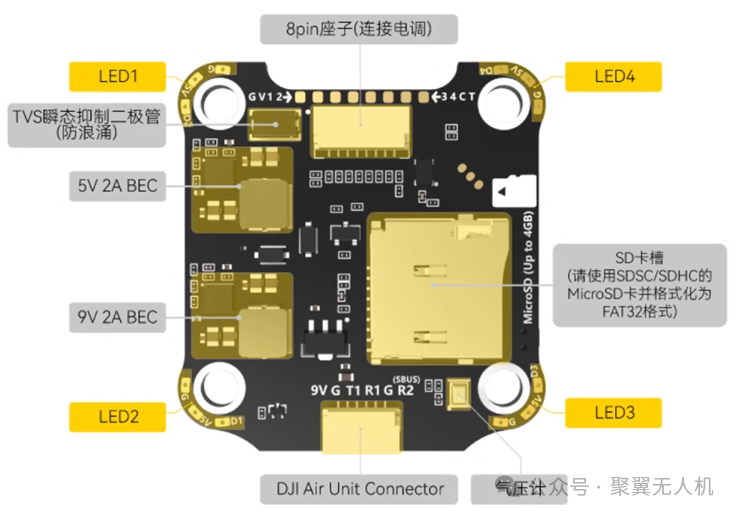
F405 V3飛控
各部分之間緊密協(xié)作,共同確保了飛行控制器能準(zhǔn)確地獲取環(huán)境信息,并根據(jù)預(yù)設(shè)規(guī)則或?qū)崟r(shí)情況調(diào)整無(wú)人機(jī)的行為。
例如,IMU會(huì)持續(xù)監(jiān)測(cè)機(jī)體運(yùn)動(dòng)狀態(tài),而GPS則為定位提供支持;處理器將這兩者提供的數(shù)據(jù)結(jié)合,再運(yùn)用適當(dāng)?shù)目刂撇呗詠?lái)保持穩(wěn)定飛行或按計(jì)劃航線行駛。
2第二部分
感知層面
在感知層面上,飛行控制器主要依賴于多種類型的傳感器來(lái)捕捉周圍環(huán)境的信息。
GPS可以提供精確的地理位置坐標(biāo),幫助確定無(wú)人機(jī)所處位置;IMU內(nèi)的加速度計(jì)和陀螺儀可檢測(cè)到機(jī)體的加速變化和旋轉(zhuǎn)角度,從而判斷其當(dāng)前姿態(tài);氣壓計(jì)用來(lái)估算海拔高度。為了提高數(shù)據(jù)質(zhì)量和可靠性,飛行控制器還會(huì)采用數(shù)據(jù)融合技術(shù),如卡爾曼濾波器(Kalman Filter),將不同來(lái)源的數(shù)據(jù)進(jìn)行綜合分析,消除噪聲干擾,得到更準(zhǔn)確的結(jié)果。此外,針對(duì)可能存在的誤差問(wèn)題,也會(huì)實(shí)施校正措施,比如溫度補(bǔ)償、零點(diǎn)漂移修正等。
控制層面
一旦獲得了足夠可靠的狀態(tài)信息,接下來(lái)就是如何有效地利用這些信息來(lái)進(jìn)行控制了。
這一步驟涉及到選擇合適的控制算法,其中最常見(jiàn)的是PID(比例-積分-微分)控制器和LQR(線性二次型調(diào)節(jié)器)。PID控制器基于誤差反饋機(jī)制,通過(guò)對(duì)誤差的比例、積分和微分三個(gè)分量加權(quán)求和,產(chǎn)生一個(gè)適當(dāng)?shù)目刂?a target="_blank">信號(hào),使系統(tǒng)輸出盡可能接近期望值。相比之下,LQR則更加復(fù)雜,它考慮到了系統(tǒng)的動(dòng)態(tài)特性,在最小化性能指標(biāo)的同時(shí),尋求最優(yōu)解。無(wú)論采用哪種方法,最終目的都是讓無(wú)人機(jī)按照預(yù)定的方式行動(dòng),無(wú)論是懸停不動(dòng)還是沿著指定路徑前進(jìn)。
決策層面
對(duì)于高級(jí)應(yīng)用而言,僅僅做到精準(zhǔn)控制還不夠,還需要具備良好的任務(wù)規(guī)劃能力和應(yīng)對(duì)突發(fā)狀況的能力。
這意味著飛行控制器需要有能力規(guī)劃出合理的飛行路線,并且在遇到障礙物或者失去通信聯(lián)系時(shí)采取適當(dāng)?shù)陌踩胧@纾趫?zhí)行攝影任務(wù)時(shí),它可以計(jì)算出最佳拍攝角度和時(shí)機(jī);當(dāng)發(fā)現(xiàn)電池電量不足時(shí),則自動(dòng)返回起降點(diǎn)降落。同時(shí),為了保證安全性,還應(yīng)該設(shè)置一系列應(yīng)急預(yù)案,如一鍵返航、自動(dòng)避障等。
3第三部分
軟件平臺(tái)
開(kāi)源項(xiàng)目
隨著開(kāi)源文化的興起,越來(lái)越多的人參與到飛行控制器的研究和發(fā)展中來(lái)。
一些知名的開(kāi)源飛行控制器項(xiàng)目包括:
● ArduPilot:適用于固定翼、直升機(jī)、多旋翼等多種類型無(wú)人機(jī)的開(kāi)源飛控系統(tǒng)。它具有強(qiáng)大的功能集和活躍的社區(qū)支持。
● PX4:另一個(gè)廣泛使用的開(kāi)源飛控平臺(tái),專注于高性能和高可靠性。它的代碼庫(kù)維護(hù)良好,文檔詳盡,適合學(xué)術(shù)研究和技術(shù)開(kāi)發(fā)。
● Betaflight:主要用于競(jìng)速類FPV(第一人稱視角)無(wú)人機(jī)的飛控固件,強(qiáng)調(diào)快速響應(yīng)和靈活配置。
盡管上述項(xiàng)目各有特色,但它們都致力于降低進(jìn)入門檻,鼓勵(lì)更多愛(ài)好者加入到無(wú)人機(jī)技術(shù)的創(chuàng)新實(shí)踐中去。
如果對(duì)開(kāi)源項(xiàng)目的內(nèi)容感興趣的話,記得在評(píng)論區(qū)告訴我們哦,直接安排走起!
-
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10428瀏覽量
180267 -
航空器
+關(guān)注
關(guān)注
0文章
92瀏覽量
10137 -
無(wú)人駕駛
+關(guān)注
關(guān)注
98文章
4058瀏覽量
120475 -
飛行控制器
+關(guān)注
關(guān)注
1文章
26瀏覽量
10383
原文標(biāo)題:無(wú)人機(jī)的飛行控制器是什么?
文章出處:【微信號(hào):芯長(zhǎng)征科技,微信公眾號(hào):芯長(zhǎng)征科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
第四集 知語(yǔ)云智能科技無(wú)人機(jī)反制技術(shù)與應(yīng)用--無(wú)人機(jī)的組成與工作原理
開(kāi)源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無(wú)人機(jī)
用樹(shù)莓派做無(wú)人機(jī)(三)——推進(jìn)和飛行控制
無(wú)人機(jī)主從式姿態(tài)同步控制器設(shè)計(jì)與仿真
無(wú)人機(jī)中的MCU是如何工作的?
無(wú)人機(jī)流行和快速增長(zhǎng)背后,對(duì)無(wú)人機(jī)開(kāi)發(fā)平臺(tái)了解多少?
無(wú)人機(jī)的時(shí)代離我們還有多遠(yuǎn)?
德州儀器全新參考設(shè)計(jì)改善無(wú)人機(jī)飛行時(shí)間和電池壽命
常見(jiàn)的無(wú)人機(jī)基礎(chǔ)知識(shí)問(wèn)答
無(wú)人機(jī)飛行控制器電路該怎么設(shè)計(jì)?
無(wú)人機(jī)的基礎(chǔ)常識(shí)要知道
無(wú)人機(jī)的工作原理
有刷電機(jī)無(wú)人機(jī)飛行控制器
基于STM32微控制器的小型無(wú)人機(jī)飛行控制系統(tǒng)
無(wú)人機(jī)飛控系統(tǒng)組成及工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論