 如何快速調整步進電機
如何快速調整步進電機
步進電機,作為一種將電脈沖信號轉換為角位移或線位移的開環控制元件,在自動化控制系統中扮演著舉足輕重的角色。其控制簡單、定位精度高、無累積誤差等特點,使其在機器人、數控機床、自動化生產線等領域廣泛應用。然而,在實際應用中,如何快速而準確地調整步進電機,以確保其性能最優化,往往是工程師和技術人員面臨的挑戰之一。本文將詳細探討如何快速調整步進電機,從基本原理到實際操作步驟,再到常見問題及解決方案,旨在為讀者提供一套全面而實用的指南。
一、步進電機基本原理與選型
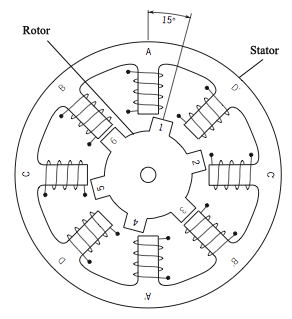
步進電機的工作原理基于電磁學原理,通過控制繞組中電流的通斷順序,產生磁場的變化,進而驅動轉子逐步旋轉。常見的步進電機有永磁式(PM)、反應式(VR)和混合式(HB)三種類型,其中混合式步進電機因綜合性能優越而應用最廣。
選型考慮:
1. 負載特性:根據所需承受的負載大小、轉動慣量及動態性能要求選擇合適的步進電機型號。
2. 控制精度:根據系統對定位精度和步距角的要求,選擇合適的步進角(如1.8°、0.9°等)。
3. 速度范圍:根據系統對轉速的要求,選擇能夠提供足夠扭矩和速度的步進電機。
4. 工作環境:考慮電機的溫度范圍、防護等級等因素,確保電機能在特定環境下穩定運行。
二、驅動器的選擇與設置
步進電機驅動器是連接控制器與步進電機之間的橋梁,負責將控制信號轉換為電機可識別的電流信號。選擇合適的驅動器對于步進電機的性能至關重要。
驅動器選型:
電流匹配:驅動器輸出電流應與步進電機的額定電流相匹配,過大可能導致過熱,過小則影響扭矩輸出。
微步控制:現代驅動器普遍支持微步控制(如16細分、256細分等),可以提高電機的運動平滑度和定位精度。
保護功能:選擇具有過流、過熱、短路等保護功能的驅動器,提高系統的穩定性和安全性。
驅動器設置:
1. 細分設置:根據實際需要調整微步細分,以達到所需的運動精度和平滑度。
2. 電流限制:通過驅動器上的撥碼開關或軟件設置,調整輸出電流至電機額定電流附近,確保最佳扭矩輸出。
3. 方向控制:正確連接方向控制信號線,確保電機能夠按預期方向旋轉。
三、快速調整步驟
1. 硬件連接與初步測試
連接電機與驅動器:按照驅動器說明書,正確連接步進電機的各相線。
連接電源與控制器:確保驅動器供電正常,控制器與驅動器之間的信號線連接無誤。
軟件配置:在控制器軟件中設置步進電機的類型、步距角、細分等參數。
初步測試:發送簡單的步進信號,觀察電機是否能按預期旋轉,記錄任何異常情況。
2. 精細調整與優化
速度優化:逐步提高電機運行速度,觀察是否有失步或過熱現象,調整驅動器參數以達到最佳速度。
加速度設置:合理設置電機的加速度,避免啟動或停止時的沖擊,提高運動平穩性。
負載測試:在接近實際工作負載的條件下測試電機性能,必要時調整電流限制或選用更大功率的電機。
振動與噪音控制:通過調整細分、優化機械結構等方式,減少電機運行時的振動和噪音。
3. 常見問題及解決方案
失步問題:可能是由于負載過大、電流設置不當或控制器輸出能力不足引起。檢查并調整相應參數。
過熱保護:通常由于電流設置過高或散熱不良導致。降低電流設置,改善散熱條件。
噪音大:可能是由于機械摩擦、軸承損壞或電磁干擾引起。檢查機械部件,優化電磁設計。
定位精度不足:通過增加細分、校準控制器輸出或優化控制算法提高定位精度。
四、高級應用與拓展
閉環控制系統:對于更高精度的應用,可以考慮引入編碼器或光柵尺等反饋裝置,構建閉環控制系統,進一步提高定位精度和穩定性。
運動控制算法:學習和應用先進的運動控制算法,如PID控制、軌跡規劃等,可以顯著提升步進電機的動態性能和定位精度。
網絡通信與遠程監控:通過以太網、CAN總線等通信協議,實現步進電機的遠程監控和控制,便于系統集成和遠程維護。
五、結論
快速調整步進電機是一個涉及硬件連接、參數配置、性能優化等多個方面的綜合過程。通過深入理解步進電機的基本原理,合理選擇驅動器并正確設置參數,結合精細的調整步驟和常見問題解決方案,可以顯著提升步進電機的運行效率和性能。隨著技術的不斷進步,步進電機的應用領域將更加廣泛,對調整技術的要求也將更加嚴格。因此,持續學習和掌握最新的調整方法和工具,對于技術人員來說至關重要。希望本文能夠為讀者提供有益的參考和指導,助力步進電機應用的快速發展和創新。
審核編輯 黃宇
-
步進電機
+關注
關注
150文章
3112瀏覽量
147543
發布評論請先 登錄
相關推薦
行星減速步進電機與步進電機的區別

步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機的伺服控制方法有哪些

什么是步進電機?步進電機的類型和結構
調速電機的速度調整范圍有哪些
如何調整二相步進電機的步進角度,控制步進角度的功能?





 工商網監
工商網監
評論