") 【CW32模塊使用】BH1750光照強度傳感器
【CW32模塊使用】BH1750光照強度傳感器
采用ROHM原裝BH1750FVI芯片供電電源:3-5V,光照度范圍:0-65535lx傳感器內(nèi)置16bitAD轉(zhuǎn)換器,直接數(shù)字輸出,省略復(fù)雜的計算,省略標定,不區(qū)分環(huán)境光源接近于視覺靈敏度的分光特性,可對廣泛的亮度進行1勒克斯的高精度測定。標準NXPICC通信協(xié)議,模塊內(nèi)部包含通信電平轉(zhuǎn)換,可以與5V單片機io直接連接。
一、模塊來源
模塊實物展示:

資料下載鏈接:
https://pan.baidu.com/s/13bVmmj0eM22mT8pBusjIyQ?pwd=8889
資料提取碼:8889
工作電壓:3-5V
工作電流:200uA
探測范圍:1~65536 lx
模塊尺寸:32.6mm×15.2mm×11.6mm
輸出方式: IIC
管腳數(shù)量:5 Pin
以上信息見廠家資料文件
三、移植過程
我們的目標是將例程移植至CW32F030C8T6開發(fā)板上【能夠測量光照強度】。首先要獲取資料,查看數(shù)據(jù)手冊應(yīng)如何實現(xiàn)讀取數(shù)據(jù),再移植至我們的工程。
3.1查看資料
測量步驟:
模塊上電后,進入掉電模式,需要通過IIC發(fā)送Power On命令啟動。
模塊啟動之后通過IIC發(fā)送測量命令進行測量。
測量命令分有單次測量和連續(xù)測量,測量完畢之后又進入掉電模式。
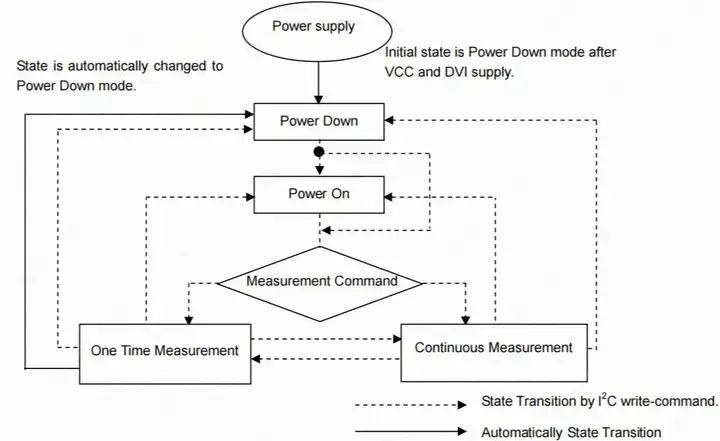
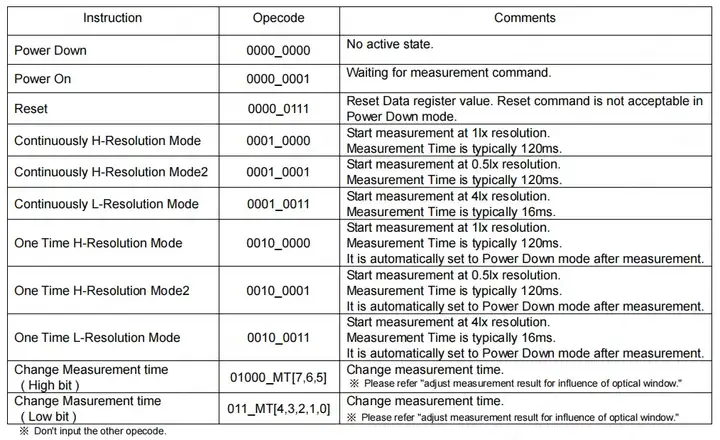
各個命令的對應(yīng)的值見下表。
我們使用到的有:
Power On(0x01):啟動模塊,讓其等待測量命令。
Continuously H-Resolution Mode(0X10):以1LX分辨率開始測量。測量時間一般為120ms(手冊推薦使用該命令)
One Time H-Resolution Mode(0X20):以1lx分辨率開始測量,測量時間通常為120ms。操作完成后,系統(tǒng)自動設(shè)置為”掉電”模式。
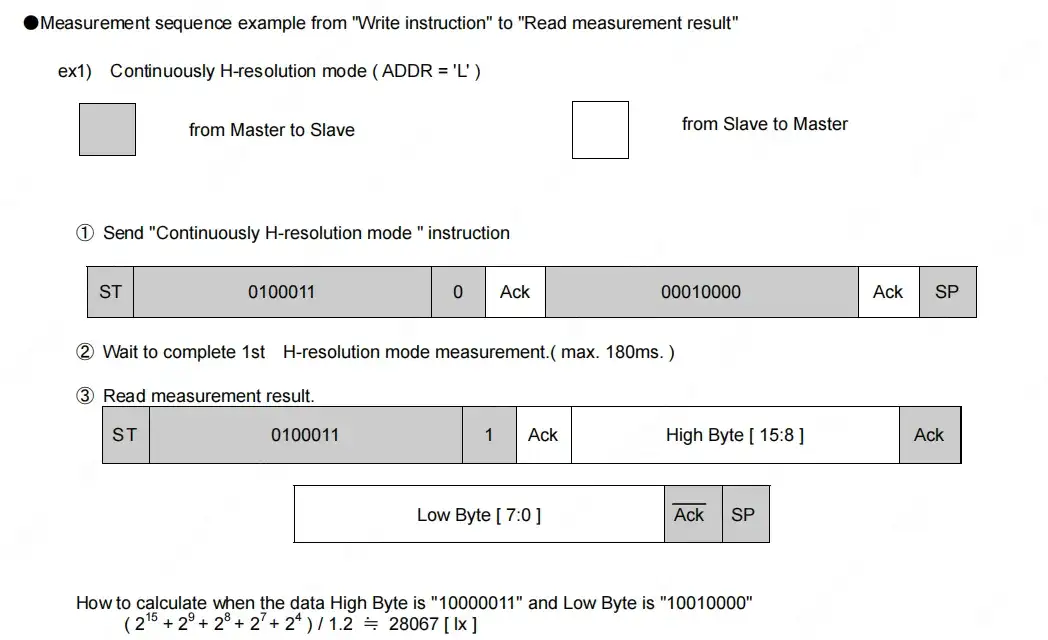
發(fā)送時序:
起始信號 -> 發(fā)送器件地址+寫 -> 等待模塊應(yīng)答 -> 發(fā)送命令 -> 等待模塊應(yīng)答 -> 停止信號。
讀取時序:
起始信號 -> 發(fā)送器件地址+讀 -> 等待模塊應(yīng)答 -> 接收數(shù)據(jù)高8位 -> 主機發(fā)送應(yīng)答 -> 接收數(shù)據(jù)低8位 -> 主機發(fā)送非應(yīng)答 -> 停止信號。
讀取完成之后,將數(shù)據(jù)高低位整合再除以1.2即可得到光照強度數(shù)據(jù)。
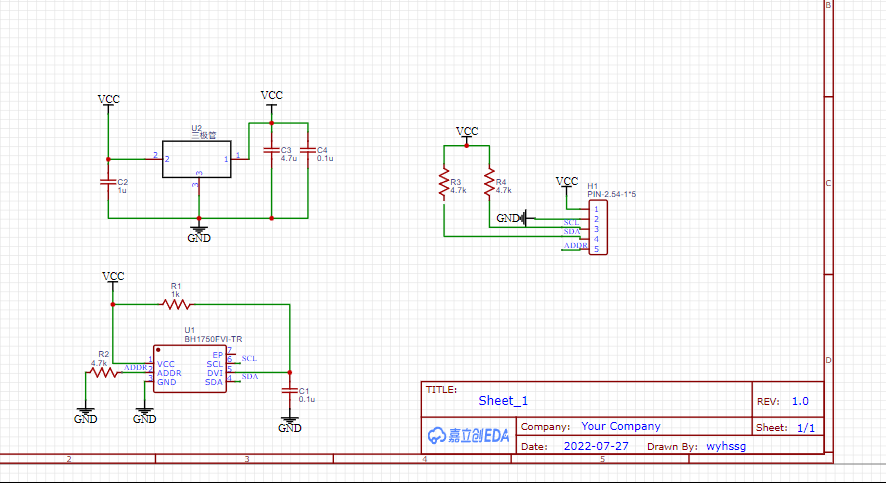
3.2引腳選擇
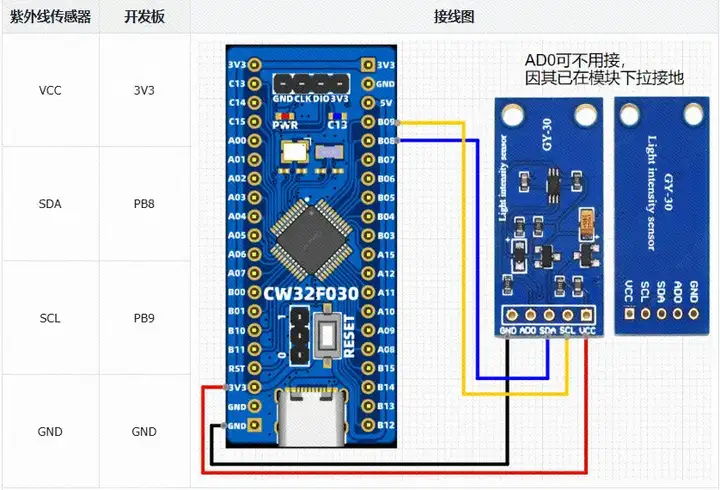
模塊接線圖
3.3移植至工程
移植步驟中的導(dǎo)入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_gy30.c與bsp_gy30.h。這里不再過多講述,移植完成后面修改相關(guān)代碼。
在文件bsp_gy30.c中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "bsp_gy30.h" #include "stdio.h" unsigned char BUF[8]; //接收數(shù)據(jù)緩存區(qū) /****************************************************************** * 函 數(shù) 名 稱:GY30_GPIO_Init * 函 數(shù) 說 明:MLX90614的引腳初始化 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void GY30_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結(jié)構(gòu)體 RCC_GY30_ENABLE(); // 使能GPIO時鐘 GPIO_InitStruct.Pins = GPIO_SDA|GPIO_SCL; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 開漏輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(PORT_GY30, &GPIO_InitStruct); // 初始化 } /****************************************************************** * 函 數(shù) 名 稱:IIC_Start * 函 數(shù) 說 明:IIC起始時序 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Start(void) { SDA_OUT(); SDA(1); delay_us(5); SCL(1); delay_us(5); SDA(0); delay_us(5); SCL(0); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱:IIC_Stop * 函 數(shù) 說 明:IIC停止信號 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Stop(void) { SDA_OUT(); SCL(0); SDA(0); SCL(1); delay_us(5); SDA(1); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱:IIC_Send_Ack * 函 數(shù) 說 明:主機發(fā)送應(yīng)答或者非應(yīng)答信號 * 函 數(shù) 形 參:0發(fā)送應(yīng)答 1發(fā)送非應(yīng)答 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Send_Ack(unsigned char ack) { SDA_OUT(); SCL(0); SDA(0); delay_us(5); if(!ack) SDA(0); else SDA(1); SCL(1); delay_us(5); SCL(0); SDA(1); } /****************************************************************** * 函 數(shù) 名 稱:I2C_WaitAck * 函 數(shù) 說 明:等待從機應(yīng)答 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:0有應(yīng)答 1超時無應(yīng)答 * 作 者:LC * 備 注:無 ******************************************************************/ unsigned char I2C_WaitAck(void) { char ack = 0; unsigned char ack_flag = 10; SCL(0); SDA(1); SDA_IN(); delay_us(5); SCL(1); delay_us(5); while( (SDA_GET()==1) && ( ack_flag ) ) { ack_flag--; delay_us(5); } if( ack_flag <= 0 ) { IIC_Stop(); return 1; } else { SCL(0); SDA_OUT(); } return ack; } /****************************************************************** * 函 數(shù) 名 稱:Send_Byte * 函 數(shù) 說 明:寫入一個字節(jié) * 函 數(shù) 形 參:dat要寫人的數(shù)據(jù) * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void Send_Byte(uint8_t dat) { int i = 0; SDA_OUT(); SCL(0);//拉低時鐘開始數(shù)據(jù)傳輸 for( i = 0; i < 8; i++ ) { SDA( dat & 0x80 ); delay_us(1); SCL(1); delay_us(5); SCL(0); delay_us(5); dat
在文件bsp_gy30.h中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #ifndef _BSP_GY30_H_ #define _BSP_GY30_H_ #include "board.h" //端口移植 #define RCC_GY30_ENABLE() __RCC_GPIOB_CLK_ENABLE() #define PORT_GY30 CW_GPIOB #define GPIO_SDA GPIO_PIN_8 #define GPIO_SCL GPIO_PIN_9 //設(shè)置SDA輸出模式 #define SDA_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_GY30, &GPIO_InitStruct); } //設(shè)置SDA輸入模式 #define SDA_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_GY30, &GPIO_InitStruct); } //獲取SDA引腳的電平變化 #define SDA_GET() GPIO_ReadPin(PORT_GY30, GPIO_SDA) //SDA與SCL輸出 #define SDA(x) GPIO_WritePin(PORT_GY30, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SCL(x) GPIO_WritePin(PORT_GY30, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SlaveAddress 0x46 //定義器件在IIC總線中的從地址,根據(jù)ALT ADDRESS地址引腳不同修改 //ALT ADDRESS引腳接地時地址為0x46,接電源時地址為0xB8 float Multiple_read_BH1750(void); char Single_Write_BH1750(uint8_t REG_Address); void GY30_Init(void); #endif
四、移植驗證
在自己工程中的main主函數(shù)中,編寫如下。
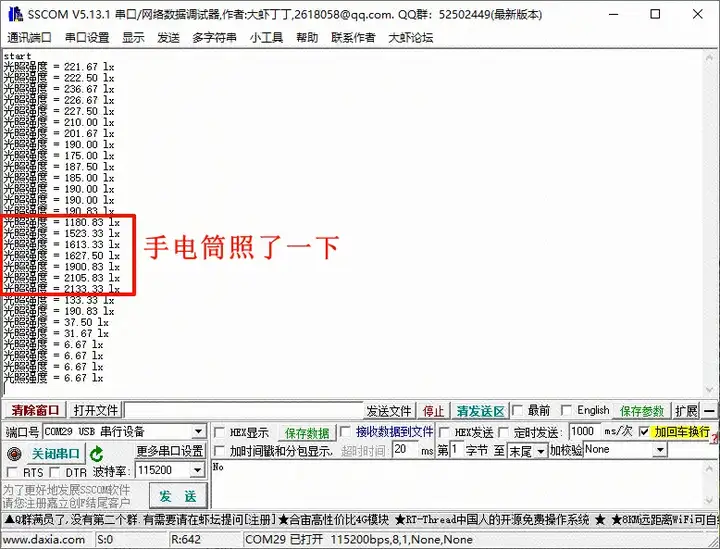
/* * Change Logs: * Date Author Notes * 2024-06-20 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_gy30.h" int32_t main(void) { board_init(); // 開發(fā)板初始化 uart1_init(115200); // 串口1波特率115200 GY30_Init(); printf("startrn"); while(1) { Single_Write_BH1750(0x10); // 連續(xù)高分辨率模式測量 delay_ms(180); //測量一般需要120ms float temp = Multiple_read_BH1750(); //讀出數(shù)據(jù) printf("光照強度 = %.2f lxrn",temp); delay_ms(500); } }
移植現(xiàn)象:輸出當前光照強度。
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1wmC7OwwJk2LB0tdP0Zx0GA?pwd=LCKF
提取碼:LCKF
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2551文章
51147瀏覽量
753992 -
CW32
+關(guān)注
關(guān)注
1文章
210瀏覽量
662
發(fā)布評論請先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論