 高效光伏控制:基于NXP LPC5536的MPPT方案解析
高效光伏控制:基于NXP LPC5536的MPPT方案解析
前言
『在不斷增長的能源需求以及持續變化的氣候條件下,能源消費結構正加速向低碳化發展,可再生能源在整個能源中的占比不斷提高。太陽能是一種優質的可再生能源,可以通過光伏電池將光能轉化為電能。在轉化的過程中,為了提升能量的利用率,需要給光伏電池配置功率優化器,從而實現最大功率點跟蹤(Maximum Power Point Tracking, MPPT),因此,也可以稱之為 MPPT 控制器。下面將會對基于 NXP LPC5536 的光伏 MPPT 控制方案進行介紹。
光伏相關原理介紹
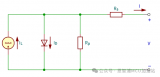
硅基太陽能電池是目前市場上主流的光伏電池產品,其中的有效結構是 P-N 結,當太陽光照射 P-N 結時,由于光生伏打效應,產生光電子-空穴對,在 P-N 結內建電場的作用下形成光生電場,從而實現光能到電能的轉換。根據光伏電池的原理進行模型簡化,可以得到如下模型:
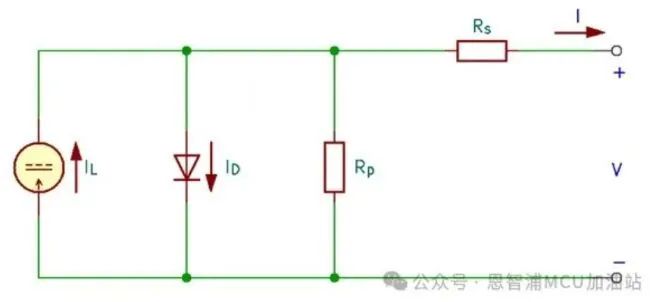
圖1. 光伏電池簡化模型
需要說明的是:
IL 是光伏電池受到光照后產生的光電流;
由于光電流相對于 P-N 結正向偏置,因此在向負載輸出時有一部分電流會流經 P-N 結,等效為電流 ID;
由于光伏電池自身的缺陷,有一部分電流會在內部消耗掉,等效為并聯電阻 Rp;
由于光伏電池連接處以及線路上會產生一定的損耗,可以將其等效為串聯電阻 Rs;
通過對光伏電池的模型進行分析,可以得到它的 I-V 特性曲線以及 P-V 特性曲線,如下圖所示:
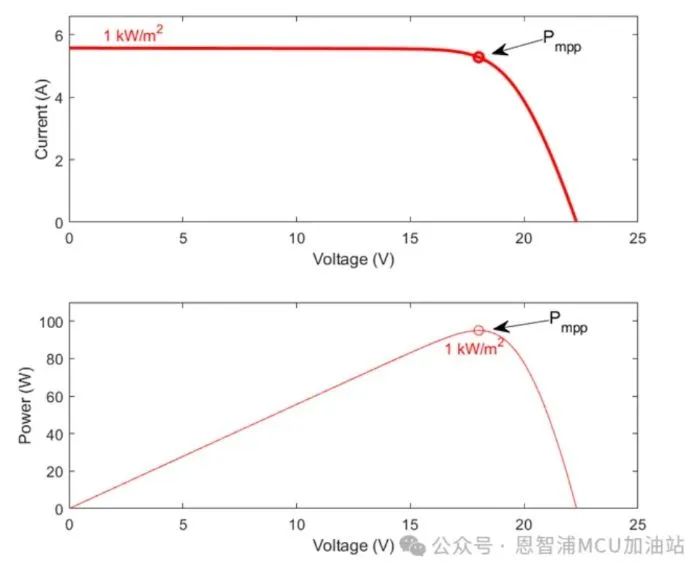
圖2. 光伏電池特性曲線
說明如下:
光伏電池在最大功率點 Pmpp 時的輸出功率最大;
I-V 曲線與縱軸的交點是光伏電池的短路電流 Isc,當負載短路時,測得的輸出電流即為短路電流;
I-V / P-V 曲線與橫軸的交點是光伏電池的開路電壓 Voc,當負載開路時,測得的輸出電壓即為開路電壓;
光伏電池的輸出特性主要受到光照強度和溫度的影響,光照強度主要影響光伏電池的短路電流,溫度主要影響光伏電池的開路電壓。
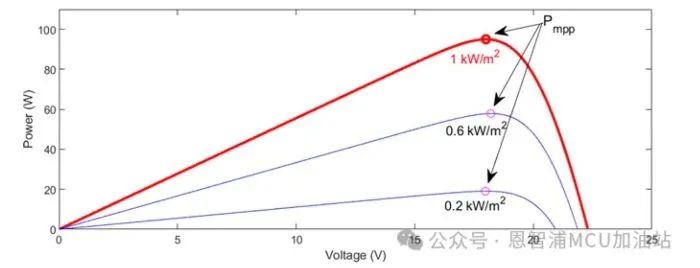
圖3. 光伏電池不同光強條件下的 P-V 特性曲線
在溫度為 25 ℃,不同的光強條件下,光伏電池的 P-V 特性曲線如圖所示,最大功率隨光強的增大而增大。
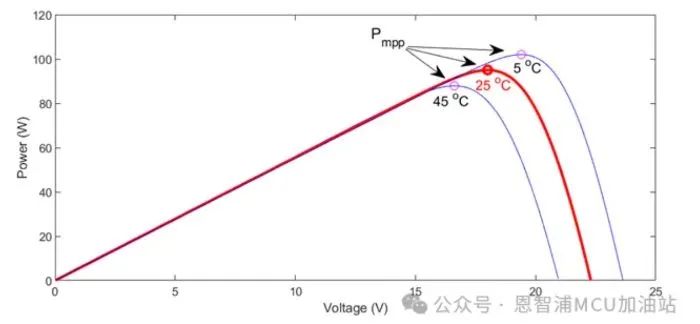
圖4. 光伏電池不同溫度條件下的 P-V 特性曲線
在實際應用中,由于外界條件的變化,光伏電池無法始終工作在最大功率點,從而產生能量的浪費。通過 DC/DC 電路以及 MPPT 算法,可以動態改變輸出狀態,使得光伏電池始終工作在最大功率點附近,從而實現能量的高效利用。
MPPT 的主流控制算法主要包括比例系數法(如開路電壓比例系數法、短路電流比例系數法等)、擾動觀察法(Perturb and Observe, P&O)和電導增量法(Incremental Conductance,INC)等。
在本方案中,使用擾動觀察法實現了 MPPT 控制。
光伏電池的 P-V 特性曲線是以最大功率點為峰值的單一峰值函數,在擾動觀察法中,通過周期性地施加擾動,使得光伏電池的工作點在 P-V 特性曲線上移動,根據光伏電池輸出電壓變化(ΔV)和光伏電池輸出功率變化(ΔP)的情況判斷正確的電壓變化方向,使得光伏電池的工作點逐漸向最大功率點移動,并在最大功率點附近工作,從而實現 MPPT控制。
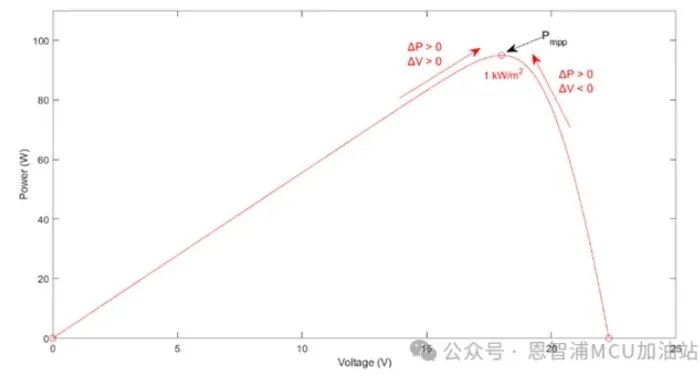
圖5. 擾動觀察法原理
在曲線的左段,當工作點朝著最大功率點移動時,ΔP>0,ΔV>0,此時需要繼續增大輸出電壓,直到 ΔP<0;
在曲線的右段,當工作點朝著最大功率點移動時,ΔP>0,ΔV<0,此時需要繼續減小輸出電壓,直到 ΔP<0。
由以上分析可知:① 若 ΔP>0,ΔV>0,需要增大光伏電池輸出電壓;②若ΔP<0,ΔV>0,需要減小光伏電池輸出電壓;③ 若 ΔP>0,ΔV<0,需要減小光伏電池輸出電壓;④ 若 ΔP<0,ΔV<0,需要增大光伏電池輸出電壓。因此,可以直接通過判斷 ΔP * ΔV 的符號來進行輸出電壓的控制,若 ΔP * ΔV >0,增大控制電壓,若 ΔP * ΔV <0,減小控制電壓,算法流程圖如下圖所示:
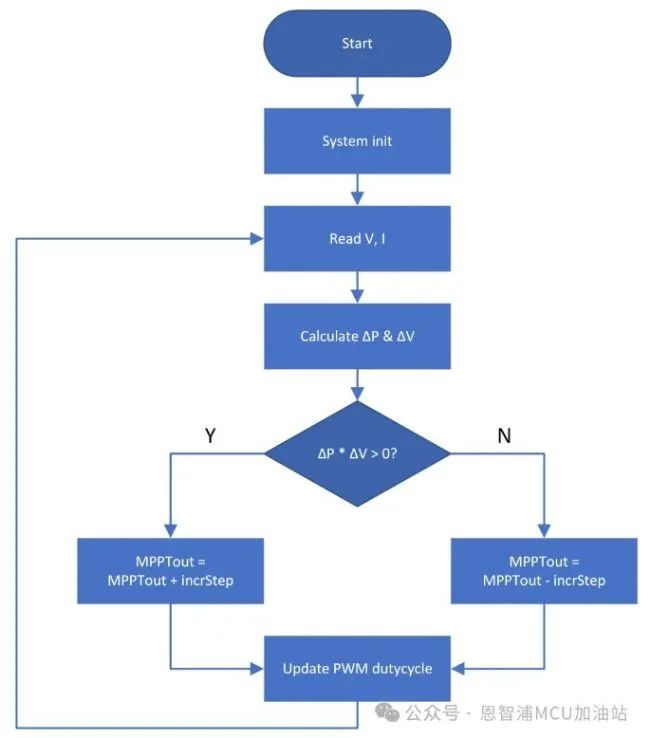
圖6. 擾動觀察法流程圖
NXP 光伏 MPPT 控制方案分析
在光伏系統中,根據光伏系統是否接入電網,可以分為離網型光伏系統和并網型光伏系統。MPPT控制器作為系統的前端部分,對光伏電池轉換的電能進行預處理,提升能量的利用率,并使用電池作為儲能設備,將多余的電能儲存起來。本方案以離網型光伏系統為研究對象進行設計,輸出端可以連接電池和直流負載。
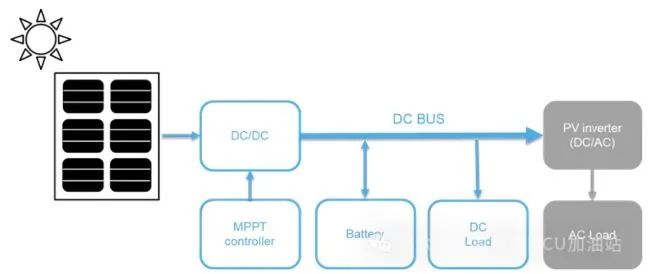
圖7. 離網型光伏系統
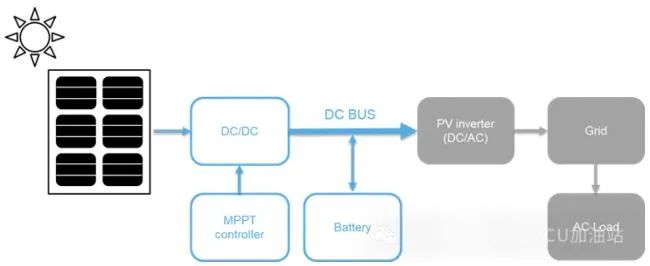
圖8. 并網型光伏系統
下圖是 NXP 光伏 MPPT 方案的系統框圖:

圖9. NXP 光伏 MPPT 方案系統框圖
方案組成:
主控MCU:LPC5536 是基于 Cortex-M33 內核,主頻最高 150MHz;256 KB 的片上 Flash 及 128KB 的片上 SRAM;2 * 16 位 ADC 模塊,最高 2Msps 采樣率,每個 ADC 模塊支持最多 8 差分或者 16 單端通道;2 * FlexPWM 模塊,每個 FlexPWM 模塊有 4 個子模塊,每個子模塊可用于控制一個半橋;其他豐富的外設以及 GPIO;提供 HVQFN48、HTQFP64、HLQFP100 等多種封裝;
其他推薦產品:
電壓及電流采樣電路:采集 Boost 電路的輸入及輸出端的電壓電流信息,為 MPPT 控制提供所需參數。電壓采樣通過分壓電阻得到,電流采樣通過采樣電阻以及電流采樣放大器得到,最終均輸入到 LPC5536 的 ADC 模塊進行采集;
Boost 電路:實現 MPPT 控制的核心部分。經 MPPT 算法計算后轉化為 PWM 占空比,通過柵極驅動器驅動 Boost 電路中的 MOSFET,實現對光伏電池輸出的控制;
充電芯片:管理 24V 電池的充電過程,也可以通過 LPC5536 實現開關控制以及充電電流控制;
24V 電池:儲能系統常用的電池包,用于存儲光伏電池轉化的電能,并為直流負載提供電源;
按鍵及 LCD:按鍵和 LCD 分別作為人機交互的輸入和界面顯示,方便用戶進行系統參數的設置以及觀察系統的運行狀態;』(注1)
硬件組成
『按照硬件功能,可以將硬件電路分成下面四個部分:
電源電路(POWER);
最大功率點跟蹤電路(MPPT);
充電控制電路(CHARGE)。
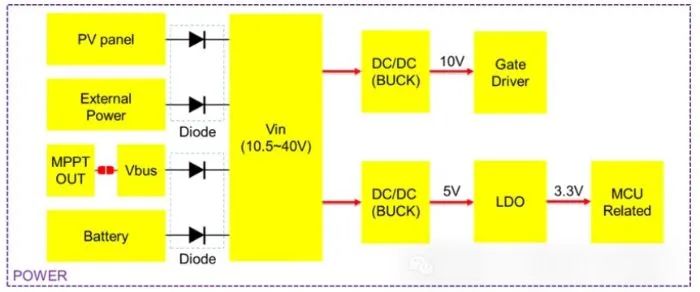
其中,電源電路為整個系統提供所需的電壓,電源電路框圖如下圖所示,電源有 4 個輸入通道:光伏板、外接電源、Vbus (MPPT OUT 可以通過焊接方式與 Vbus 進行連接)以及電池,通過二極管連接并輸入到 Vin,作為 DC/DC 的輸入。其中,10V 用于柵極驅動,為 MPPT 電路提供驅動信號;3.3V 用于 MCU 相關的電路,通過 BUCK 電路降壓到 5V 然后經 LDO 獲得。
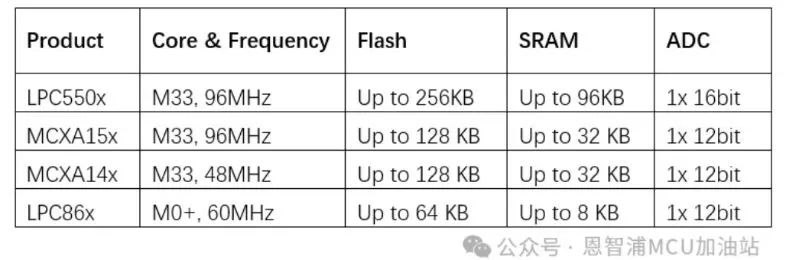
圖10. 電源電路框圖
其余三個部分的電路框圖如下圖所示:
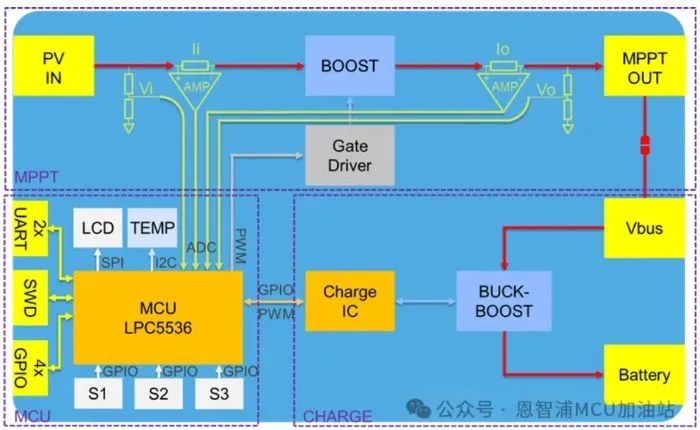
圖11. 其余三個部分電路框圖
MPPT 電路拓撲結構采用同步 BOOST,通過 PWM 控制柵極驅動器驅動 MOSFET 從而實現最大功率點跟蹤。輸入端接 18V 光伏板,分別通過電流采樣調理電路采集輸入端電壓和電流,并傳入 MCU 的 ADC 完成信號采集;輸出端可以直接連接到負載上,或者通過焊接的方式跨接到 Vbus 上,方便進行調試,輸出端同樣也包含了類似的電壓電流采樣電路。
充電控制電路使用 SC8802 芯片,支持 1 ~ 6 節鋰電池的充放電,通過控制四開關管 BUCK-BOOST 對充電功率進行調整。MCU 可以通過 GPIO 和 PWM 對充電芯片進行控制,實現充電功能的開關,并控制充電電流。
MCU 控制電路主要包括 MCU 最小系統、人機交互相關外設(屏幕和按鍵)以及一些接口,屏幕采用 1.47 英寸的 SPI LCD,通過 3 個按鍵進行控制。另外,板載 LM75B 溫度傳感器,和 MCU 通過一組 I2C 接口進行通訊。SWD 接口用于程序的下載和調試,2 組 UART 接口用于串口調試,4 個預留的 GPIO 用于測試及附加功能。
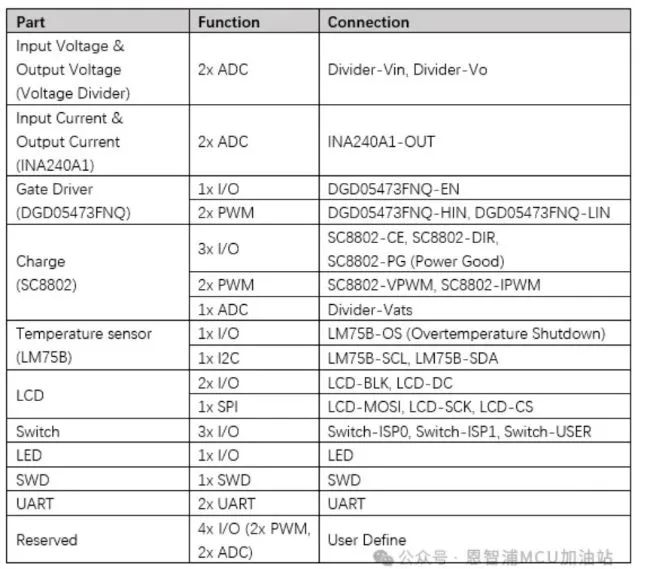
將所用到的 MCU 資源進行總結,共使用了 5 * ADC,4 * PWM,1 * SPI,1 * I2C,1 * SWD,2 * UART,11 * I/O,另外預留了 4 個接口,可以用作 4 * I/O 或者2 * PWM 和 2 * ADC,具體情況如下表所示:
電路測試
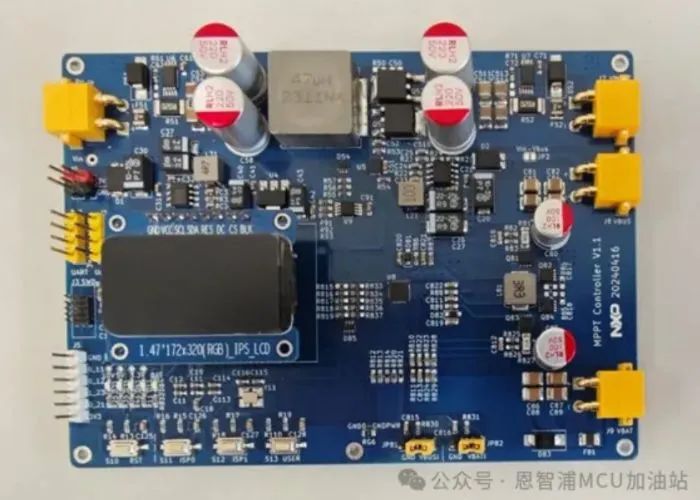
圖12. 電路實物圖
因為 BOOST 是本方案中實現 MPPT 功能的主拓撲,所以 MOSFET 的驅動效果直接影響了最終的控制效果,下面對 BOOST 拓撲中 MOSFET 的驅動波形進行測量。由于 DC/DC 電路很容易產生干擾,需要盡可能減小接地環路的面積,使用示波器的接地彈簧進行測量,低邊 MOSFET 的驅動波形如圖 13(a) 所示,高邊 MOSFET 的驅動波形如圖 4(b) 所示:
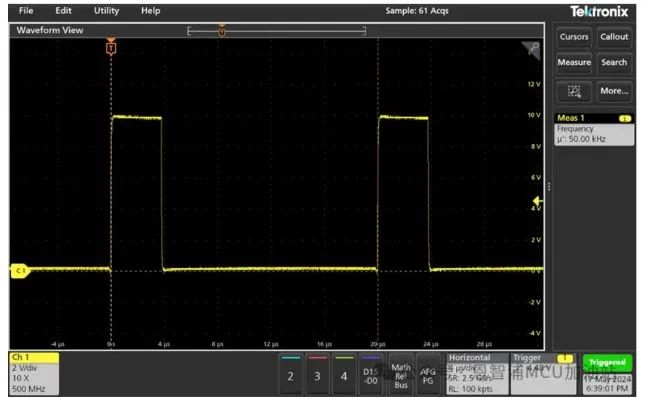
圖 13(a). 低邊 MOSFET 驅動波形
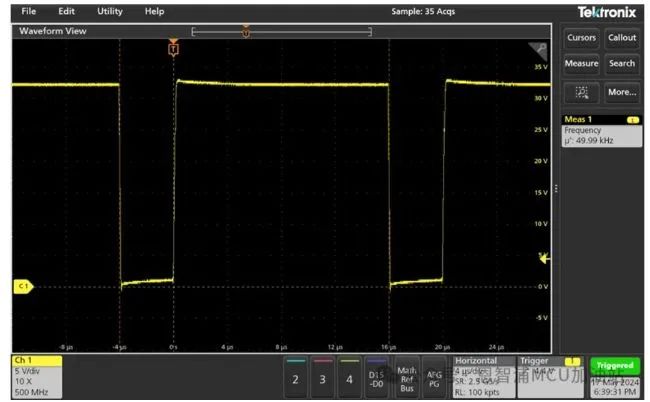
圖 13(b). 高邊 MOSFET 驅動波形
小結
本文介紹了光伏的相關原理和 NXP 光伏 MPPT 方案,聚焦了 MPPT 方案的硬件設計部分,展現了如何通過組件與電路設計實現高效穩定的太陽能轉換系統。后續我們將介紹該方案的軟件設計部分,共同見證這一高效光伏 MPPT 解決方案的完整面貌!
-
NXP
+關注
關注
60文章
1281瀏覽量
184442 -
光伏
+關注
關注
44文章
3011瀏覽量
69026 -
MPPT
+關注
關注
9文章
200瀏覽量
37339 -
光伏控制
+關注
關注
0文章
3瀏覽量
5053
發布評論請先 登錄
相關推薦

光伏逆變器負載的功能和優勢
關于光伏逆變器的MPPT


EasyGo使用筆記丨分布式光伏集群并網控制硬件在環仿真應用
MPPT控制器的安裝方法與注意事項
MPPT控制器的工作原理和作用
光伏儲能常用芯片型號推薦
低壓MOS在光伏優化器(MPPT)上的應用

低壓MOS在光伏優化器(MPPT)上的應用

恩智浦推出一種基于LPC5536的光伏MPPT控制方案
MPPT光伏控制系統電源/485/232/ 100M/USB2.0/CAN接口防護保護

基于 NXP LPC845 EVK 介紹






 工商網監
工商網監
評論