") 3D深度感測的原理和使用二極管激光來實現(xiàn)深度感測的優(yōu)勢
3D深度感測的原理和使用二極管激光來實現(xiàn)深度感測的優(yōu)勢
本文介紹了3D深度感測的原理和使用二極管激光來實現(xiàn)深度感測的優(yōu)勢。
世界是三維的。這句話如此容易理解,以至于大多數(shù)人從未懷疑過自己感知世界的方式。但事實上,人的每只眼睛每次可捕獲一幅平面圖像,就像相機一樣。根據(jù)雙眼捕獲的兩幅平面圖像形成3D感知,這個神奇的過程只會發(fā)生在人的大腦中。
如今,我們越來越需要數(shù)字系統(tǒng)與 3D 世界交互——無論是解讀手勢控制、進行面部識別,還是讓汽車進行自動駕駛。為了完成這些任務,我們需要至少給數(shù)字系統(tǒng)賦予人類的一些深度感知能力。
01 深度感測
數(shù)位成像領域使用兩種基本的 3D(深度)感測方法:三角測量和飛行時間 (time-of-flight,ToF) 測量。這兩種技術有時甚至結合使用。
三角測量基于幾何學。雙眼視覺是三角測量的一種形式,是人類 3D(立體)視覺的工作方式。人的雙眼呈水平分開。這意味著兩只眼睛分別從略微不同的角度看世界。這種角度差異會產(chǎn)生視差,即,物體相對于背景的位置會根據(jù)你用哪只眼睛看而發(fā)生偏移。然后,大腦利用這些視差信息來感知視野范圍內物體的深度(距離),并產(chǎn)生對視野的 3D 感知。
然而,立體視覺可能依賴于照明條件,且需要獨特的紋理表面。這導致難以可靠地實現(xiàn)立體視覺。相反,計算機視覺系統(tǒng)使用三角測量的另一種形式,依賴于結構光。“結構光”這個名稱聽起來很深奧,其實就是指將圖案(例如,一系列線條或無數(shù)光點)投射到物體上,并從略微不同的角度分析圖案的畸變程度。相較于重建真實的雙眼視覺,這種方法對處理能力的要求低很多,而且使計算機能夠快速計算深度信息并重建 3D 場景。
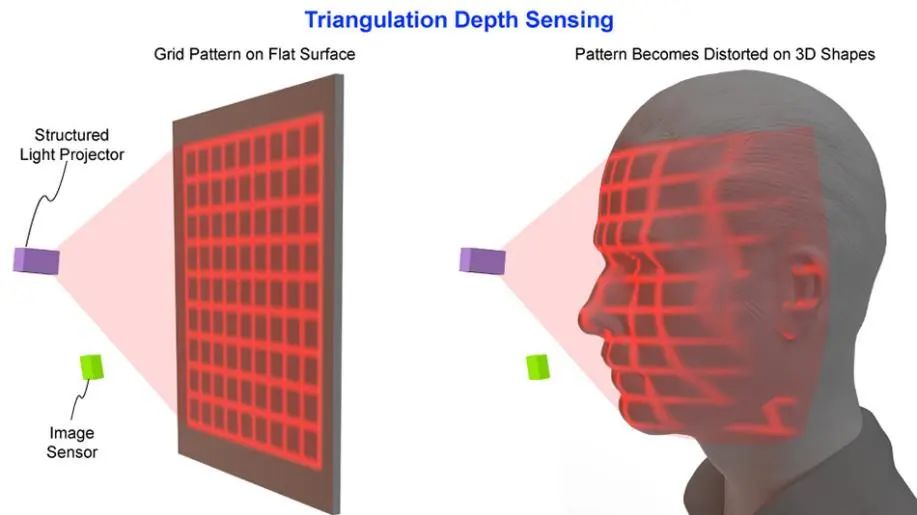
在其中一種形式的三角測量深度感測技術中,結構光圖案被投射在場景中,再由成像系統(tǒng)分析圖案的畸變程度,以獲得照明區(qū)域的深度信息
三角測量法在處理表面的高分辨率繪圖方面具有優(yōu)勢。這種方法在短距離應用中效果最佳,因此對于面部識別等任務非常有用。
飛行時間 (ToF) 成像技術有兩種不同的形式。在“直接飛行時間”(direct Time-of-Flight,dToF)技術中,場景被光脈沖照亮,系統(tǒng)會測量光脈沖反射回來所需的時間。由于光速是已知的,因此這個回程時間可直接轉換為距離。如果針對圖像的每個像素獨立進行這項計算,即可得出場景中每個點的深度值。
ToF 技術的第二種形式是“間接飛行時間”(indirect Time-of-Flight, iToF)。在 iToF 技術中,照明光源是連續(xù)的調變信號。系統(tǒng)會在返回光中測量這種調變模式的相移。這樣可提供用于計算物體距離的數(shù)據(jù)。
ToF 技術的優(yōu)勢在于能夠快速完成大面積和長距離的測量。這使它非常適合虛擬實境頭戴式裝置中的房間掃描或機器人導航中的障礙物檢測等任務。
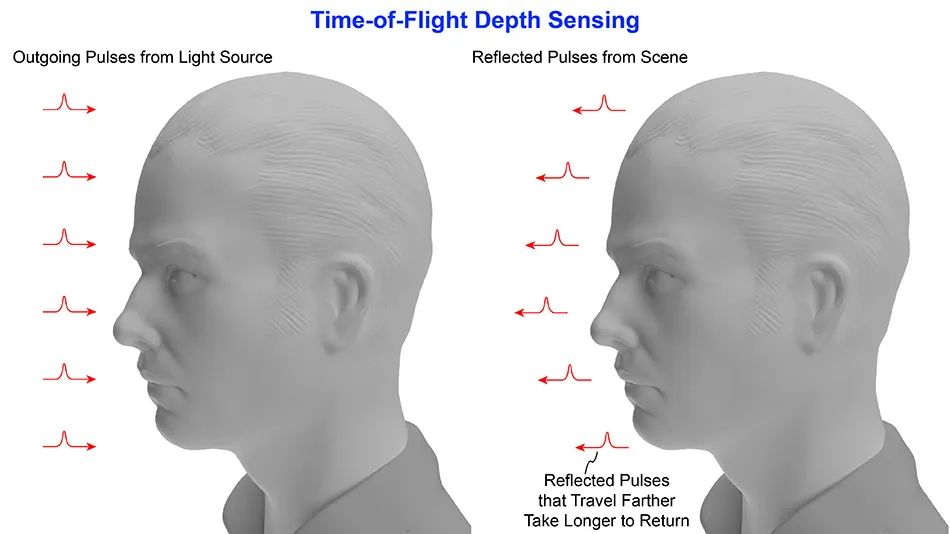
直接飛行時間感測光脈沖的往返行程時間,并將測得的時間轉換為距離
02 3D感光源要求
光源的特性是決定三角測量和ToF 3D感測方法的有效性和準確性的關鍵因素。每種應用都有獨特的照明要求,但也有某些共同需求。
三角測量光源還需要具有穩(wěn)定的光束指向特性。這種特性的任何波動都可能導致深度測量不準確。
ToF系統(tǒng)要求光源能夠發(fā)射精確的短光脈沖(dToF)或可進行高頻調變的連續(xù)輸出(iToF)。要進行準確的距離測量,精確且升降時間很短的脈沖時間和調變頻率至關重要。
ToF 系統(tǒng)(尤其是使用泛光照明來覆蓋大面積或長距離的系統(tǒng))通常需要比三角測量系統(tǒng)更高的輸出功率。這可確保返回光具有足夠的強度,能被檢測到,并確保系統(tǒng)在有強烈環(huán)境光的情況下能夠正常運行。
隨著輸出功率的提高,對功率效率(光輸出功率與輸入電功率之比)的需求變得更加重要。對于便攜式設備(由電池供電),效率尤其重要。
03 激光幫助實現(xiàn)更高質量的深度感測
二極管激光比任何其他光源都能更好地滿足這些要求(對于三角測量和TOF感測)。早就有一些3D感測應用部署了發(fā)光二極管(Light emitting diode, LED),因為LED容易獲得且成本相對較低。但隨著對3D感測系統(tǒng)性能和效率的需求不斷提高,LED變得不太符合要求。
其中一個原因是,二極管激光具有幾個獨特的特性:光譜輸出窄、光束相干性、亮度高。這些特性使二極管激光非常適用于創(chuàng)建精確、高對比度、穩(wěn)定的結構化光圖案。
由于激光的光譜輸出窄,使得可以輕而易舉地在檢測系統(tǒng)中過濾掉環(huán)境光。這樣可提高各種感測系統(tǒng)在明亮的陽光下或其他光線充足的場景中的性能。
二極管激光具有更高亮度,這可進一步提高返回信號的功率。特別是對于TOF應用來說,這意味著更短的光閘時間、更高的幀速率,以及能夠更敏銳地看到反射性不高的物體。同樣,這將會提高系統(tǒng)在光線充足的場景中的性能。由于強度較低,因此LED難以實現(xiàn)同樣水平的細節(jié)分辨率和深度分辨率。
此外,與LED相比,二極管激光在功耗和尺寸方面具有明顯優(yōu)勢。二極管激光外形小巧,而又能夠發(fā)射強信號,因此成為了由電池供電的小型設備的理想之選。
最后,二極管激光的切換或調變速率比LED快得多。這種快速調變使得可以采用準確性更高的先進ToF技術。
-
二極管
+關注
關注
147文章
9662瀏覽量
166808 -
3D
+關注
關注
9文章
2894瀏覽量
107640 -
感測
+關注
關注
0文章
23瀏覽量
12845
原文標題:3D深度感測
文章出處:【微信號:bdtdsj,微信公眾號:中科院半導體所】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
AR眼鏡采用3D繪圖與深度感測 視覺效果顯著增強
激光二極管的最新應用
激光二極管穩(wěn)壓二極管檢測方法分享
穩(wěn)壓二極管和激光二極管等特殊二極管相關知識解析
大聯(lián)大旗下詮鼎推出基于MicroVision技術的3D深度感測激光掃描技術在智能家居領域的應用解決方案

激光二極管的原理和應用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論