") V2X車路協(xié)同系統(tǒng)
V2X車路協(xié)同系統(tǒng)
概述
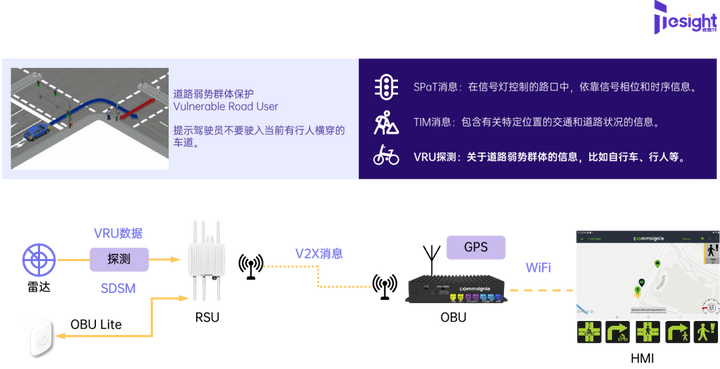
V2X車路協(xié)同系統(tǒng)作為經(jīng)緯恒潤高級別智能駕駛業(yè)務(wù)自動駕駛系統(tǒng)的有力支撐,實(shí)現(xiàn)了對無人駕駛車輛運(yùn)行區(qū)域內(nèi)交通情況的實(shí)時(shí)感知以及V2X通信。一方面將感知對象的狀態(tài)參數(shù)(包括絕對位置、速度、航向角、尺寸、類型等)實(shí)時(shí)上報(bào)到后臺調(diào)度系統(tǒng),另一方面通過路側(cè)通信單元(RSU)的PC5通信接口與車載通信單元(OBU)直接通信,將感知到的目標(biāo)結(jié)果發(fā)送到智能駕駛車輛,使車輛獲得局部實(shí)時(shí)交通狀況,以增強(qiáng)智能車輛的感知能力,從而減小交通事故發(fā)生概率。
產(chǎn)品介紹
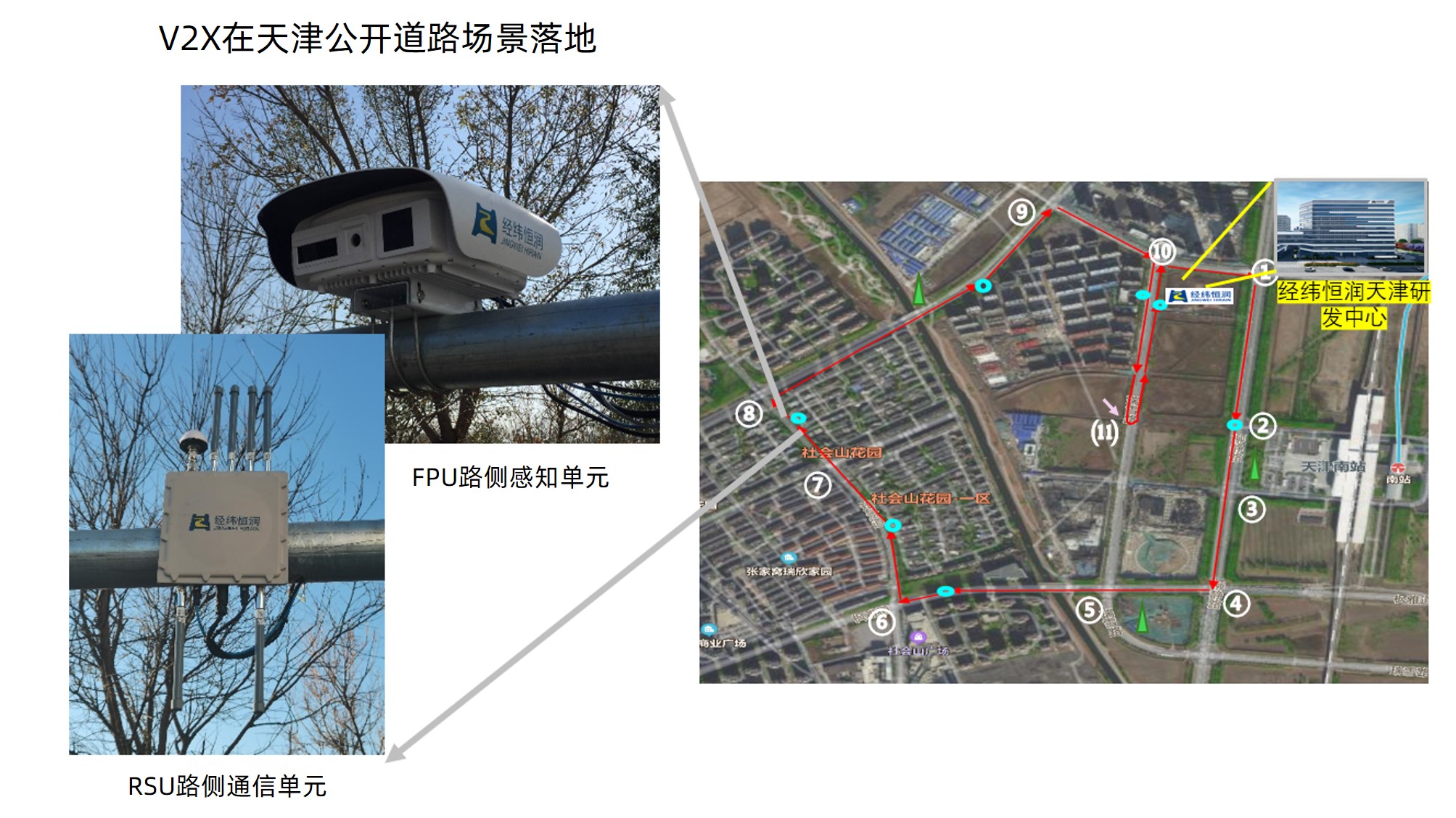
經(jīng)緯恒潤V2X車路協(xié)同系統(tǒng)主要由5合1融合感知單元(FPU)、路側(cè)通信單元(RSU)和車載通信單元(OBU)三部分組成。

- 融合感知單元(FPU)
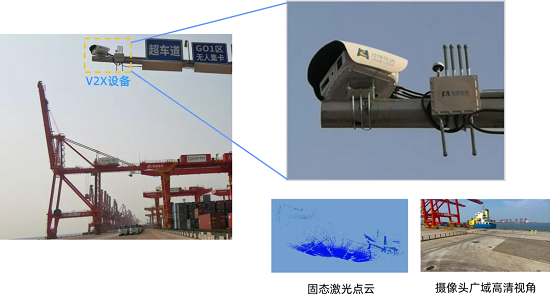
針對傳統(tǒng)的傳感器分散部署方案需要定期相互校準(zhǔn),否則無法融合以及傳感器環(huán)境適應(yīng)性、功能安全和使用壽命滿足不了港口環(huán)境要求等問題,經(jīng)緯恒潤研發(fā)了5合1路側(cè)融合感知單元,將車規(guī)級量產(chǎn)的激光雷達(dá)、毫米波雷達(dá)、攝像頭以及HPC高性能計(jì)算單元布置于同一設(shè)備內(nèi),實(shí)現(xiàn)了各傳感器的同視軸一體化安裝,并可對光學(xué)器件表面進(jìn)行高壓氣流自動清潔,大大減少了設(shè)備初次安裝部署、定期清潔和標(biāo)定的維護(hù)時(shí)間,保障感知功能長期可靠運(yùn)行,提升了港口運(yùn)維效率。同時(shí)具備設(shè)備自檢功能,當(dāng)系統(tǒng)中的零部件(包括傳感器、計(jì)算單元等)出現(xiàn)問題時(shí)能夠自動檢測故障原因,并向后臺進(jìn)行故障上報(bào)。

- 路側(cè)通信單元(RSU)
經(jīng)緯恒潤自主研發(fā)的車規(guī)級RSU通信主機(jī)采用高增益天線,覆蓋范圍可達(dá) 300m,通過短距離直連通信PC5接口實(shí)現(xiàn)與車輛之間交換快速變化的動態(tài)信息(如位置、速度、航向等),負(fù)責(zé)將FPU感知結(jié)果、交通安全、交通效率和自動駕駛相關(guān)信息分發(fā)至云端以及車端,實(shí)現(xiàn)人、車、路、云之間的全通信連接和高效信息交互,擴(kuò)展自動駕駛車輛的感知范圍,減小感知盲區(qū),使其可以更加安全、高效的通過復(fù)雜路段。通信安全滿足《基于LTE的車聯(lián)網(wǎng)無線通信技術(shù)安全證書管理系統(tǒng)技術(shù)要求》,滿足機(jī)密性、完整性、可認(rèn)證性,同時(shí)可抵御重放攻擊,可檢測網(wǎng)絡(luò)嗅探、DDoS攻擊等行為。

- 車載通信單元(OBU)
車載通信單元(OBU)支持標(biāo)準(zhǔn)5G空口Uu接口及PC5接口通信方式與車端、路端及云端進(jìn)行交互,通過獲取到的道路信息、交通信息、事件信息、車輛信息等實(shí)現(xiàn)V2X各種應(yīng)用場景,為輔助駕駛和自動駕駛提供服務(wù)。當(dāng)存在碰撞危險(xiǎn)時(shí),OBU能夠通過接收路側(cè)感知設(shè)備的預(yù)警信息,實(shí)現(xiàn)交叉路口碰撞預(yù)警以及弱勢交通參與者碰撞預(yù)警等功能;能夠接收路側(cè)感知設(shè)備的感知數(shù)據(jù),實(shí)現(xiàn)路側(cè)感知設(shè)備和無人駕駛車輛的感知數(shù)據(jù)共享;同時(shí)能夠通過車輛之間的信息實(shí)時(shí)交互和通信,完成交匯路口轉(zhuǎn)向預(yù)警以及超車和碰撞預(yù)警等功能。

產(chǎn)品優(yōu)勢和特點(diǎn)
- 傳感器鏈路延時(shí)小于20ms
- 實(shí)現(xiàn)對激光雷達(dá)、攝像頭、毫米波雷達(dá)感知信息的融合
- 實(shí)現(xiàn)集卡、平板車輛、辦公車輛、行人等目標(biāo)的檢測和識別
- 實(shí)現(xiàn)集卡、平板車輛、辦公車輛、行人等目標(biāo)的位置測量、速度測量及尺寸估計(jì)
- 多傳感器采用同視角、一體化的結(jié)構(gòu)設(shè)計(jì),避免獨(dú)立布置,方便現(xiàn)場安裝、標(biāo)定及后期校準(zhǔn)工作
- 激光傳感器具有自清潔功能,降低后期維護(hù)成本
- 具有防水、防塵、防鹽霧能力
- 與邊緣計(jì)算設(shè)備進(jìn)行時(shí)間同步,同步誤差小于5ms
應(yīng)用案例
經(jīng)緯恒潤V2X系統(tǒng)在天津公開道路開展部署測試,結(jié)合無人駕駛測試V2X第一階段和第二階段的應(yīng)用場景。
此外,經(jīng)緯恒潤V2X車路協(xié)同系統(tǒng)已在日照港和龍拱港集裝箱碼頭部署運(yùn)營,為L4高級別智能駕駛業(yè)務(wù)自動駕駛系統(tǒng)提供了有力支撐。
在港口場景下,主要有2大應(yīng)用場景:
V2I場景(車輛和基礎(chǔ)設(shè)施通信),依托經(jīng)緯恒潤V2X路側(cè)感知系統(tǒng)和路側(cè)通信單元、道閘控制系統(tǒng)等配套設(shè)施建設(shè)及內(nèi)/外集卡路由通道新作業(yè)工藝,使得自動化堆場能夠?qū)崿F(xiàn)基于多傳感器融合感知的路口交通情況實(shí)時(shí)監(jiān)控,同時(shí)對道閘根據(jù)作業(yè)流實(shí)現(xiàn)了自動化地智能控制開閉,實(shí)現(xiàn)了無人集卡與傳統(tǒng)內(nèi)集卡、外集卡作業(yè)車輛混流下安全通行并高效作業(yè),避免了路口擁堵及交叉作業(yè)危險(xiǎn)。
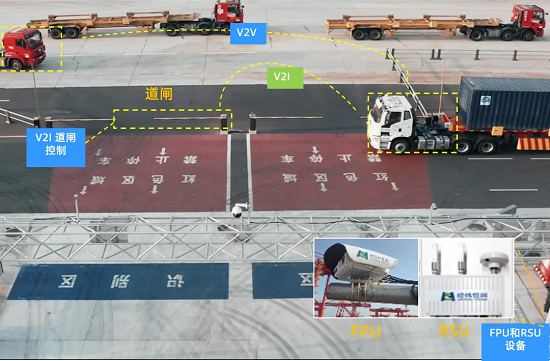
經(jīng)緯恒潤V2X車路協(xié)同在港口實(shí)現(xiàn)道閘自動控制
V2V場景(車輛和車輛通信),通過車輛之間的信息實(shí)時(shí)交互和通信,完成交匯路口轉(zhuǎn)向預(yù)警以及超車和碰撞預(yù)警等功能,提升單車自動駕駛的安全和港口作業(yè)效率。

經(jīng)緯恒潤V2X車路協(xié)同在港口實(shí)現(xiàn)車-路、 車-車通信
V2X車路協(xié)同系統(tǒng)在自動駕駛和未來無人駕駛場景中發(fā)揮了重要作用,同時(shí)也是未來智慧交通和智慧城市建設(shè)方面重要的基礎(chǔ)設(shè)施。
-
智能駕駛
+關(guān)注
關(guān)注
3文章
2546瀏覽量
48803 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13867瀏覽量
166597 -
V2X
+關(guān)注
關(guān)注
25文章
211瀏覽量
43549
發(fā)布評論請先 登錄
相關(guān)推薦
V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

車聯(lián)網(wǎng)HIL仿真測試解決方案

智能車路協(xié)同試驗(yàn)車開發(fā)服務(wù)

SmartDV將SDIO系列IP授權(quán)給RANiX開發(fā)車聯(lián)網(wǎng)(V2X)產(chǎn)品

基于V2X和自動駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

如何應(yīng)對V2X頻譜挑戰(zhàn)
設(shè)計(jì)仿真 | 基于VTD的V2X仿真應(yīng)用

C-V2X安全證書:保障車路云系統(tǒng)通信安全的關(guān)鍵

助力車路協(xié)同,基于i.MX8MPlus核心板的路側(cè)單元主控方案

基于實(shí)車在環(huán)(ViL)的V2X測試方法
V2X技術(shù)與智能傳感器的完美融合:提升城市道路安全
V2X與ETC到底有什么不同?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論