 愛普生M-G366PDG適用于商用車自動駕駛領域
愛普生M-G366PDG適用于商用車自動駕駛領域
商用車行業正在經歷由自動駕駛技術驅動的革命性變化。因為具有工作環境路況單一、路線固定、司機工作強度高、商業價值大的特點,商用車自動駕駛被預測將率先實現商用化落地。自動駕駛定位要求車輛對自車位姿的估計足夠精準,精準意味著需要在厘米級別上測量位置。
在商用車自動駕駛領域,IMU的性能直接關系到車輛導航的準確性和系統的穩定性。如果IMU的分辨率不足,將無法捕捉到車輛微小的運動變化,導致導航誤差累積過大,影響車輛的定位精度。而穩定性差的IMU在面對溫度變化、振動等外界干擾時,其測量結果容易出現波動,這不僅會影響車輛的行駛安全,還可能導致自動駕駛系統頻繁退出,嚴重影響駕駛員的使用感受。
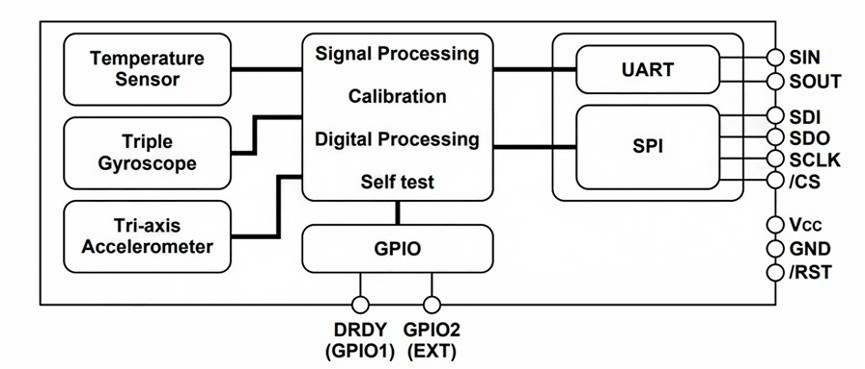
EPSON的慣性測量單元M-G366PDG0,以其高分辨率和高穩定性的特點,為商用車自動駕駛提供了一個理想的解決方案。該IMU的六自由度設計,使其能夠全面捕捉車輛的姿態和運動信息。三軸陀螺儀達到了戰術級陀螺儀標準,量程可達到 ±450 °/s,零偏穩定性低至1.2°/h,角隨機游走僅為0.08°/√h,這意味著它即使在長時間的運行中,也能保持極高的測量穩定性。三軸加速度計滿足的最大量程可達±16 G,標稱帶寬達到333Hz,完全可以滿足車輛自動駕駛的定位需求,能夠在各種復雜環境下保持高精度的測量。
該慣性測量單元還支持SPI和UART接口,便于與車輛的其他系統集成,實現高效的數據通信;也配備了自檢功能,可以檢查陀螺儀和加速度計的輸出是否在預定的范圍內正常工作。這不僅增強了系統的可靠性,也使得維護更為簡單。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
愛普生
+關注
關注
0文章
324瀏覽量
22174 -
IMU
+關注
關注
6文章
316瀏覽量
45805 -
自動駕駛
+關注
關注
784文章
13877瀏覽量
166618
發布評論請先 登錄
相關推薦
中科慧眼再獲多家頭部商用車主機廠量產定點
近日,中科慧眼高階輔助駕駛解決方案再獲多家頭部商用車主機廠量產定點。這不僅標志著中科慧眼智駕解決方案牢牢占據了輕卡輕客智能化轉型高地,同時進一步搶灘重卡優化升級的戰略風口,位居商用車智駕領域
愛普生M-G366PDG慣性測量模塊選型
愛普生M-G366PDG是一款高性能的慣性測量單元(IMU),13位PN碼位X2G0001910001。標準包裝的15位編碼是X2G000191000100。具有小尺寸、輕重量、低
發表于 09-20 17:14
?0次下載
愛普生M-G330PDG0慣性測量模塊選型
愛普生M-G330PDG0是一款高性能的慣性測量單元(IMU),完整型號為M-G330PDG0,產品編碼為:X2G000201000100。愛普生

智駕科技MAXIEYE宣布成立商用車智駕子品牌「阡途」
2024年7月30日,AI驅動的自動駕駛服務商——智駕科技MAXIEYE宣布成立商用車智駕子品牌「阡途」,定位MAXIEYE旗下商用車自動駕駛創新單元,致力于成為
FPGA在自動駕駛領域有哪些優勢?
FPGA(Field-Programmable Gate Array,現場可編程門陣列)在自動駕駛領域具有顯著的優勢,這些優勢使得FPGA成為自動駕駛技術中不可或缺的一部分。以下是FPGA在自
發表于 07-29 17:11
中科慧眼智能駕駛技術獲市場高度認可,引領商用車智駕新趨勢
近日,智能駕駛技術領域的佼佼者中科慧眼再次獲得知名商用車主機廠的項目量產定點,標志著其在智能駕駛技術領域的實力得到了市場的廣泛認可。作為一級
愛普生IMU系列新品——M-G366PDG和M-G330PDG
自2011年首次推出以來,愛普生的IMU已用于一系列客戶應用,從精準農業(GNSS2)和無人機到相機和天線平臺的振動控制和穩定性,卓越的性能和質量為其贏得了良好的口碑。我們之前也介紹過IMU系列

阜時科技近期簽訂商用車自動駕駛全固態激光雷達批量訂單
阜時科技戰略合作的某頭部激光雷達(LiDAR)公司,簽訂商用車自動駕駛全固態激光雷達批量訂單,近期將陸續交付。
東軟睿馳李源:商用車自動駕駛產品轉型升級之路
近日,由中國汽車工業協會主辦的2024中國商用車論壇在湖北省十堰市隆重舉辦,本屆論壇以“新步伐?新成效?新提高,助力商用車產業高質量發展”為主題,聚集主管部委領導、行業專家、主流商用車企高層、供應鏈企業代表,共商共研共話中國

東風公司實施商用車“躍升工程”,打造世界一流的商用車企業
3月28日,東風公司宣布實施商用車“躍升工程”,成立商用車事業部,推動商用車業務一體化運營,集中優勢資源,做強做優做大商用車業務,打造世界一流的商用
愛普生M-G365/M-G366 MEMS六軸陀螺儀替代光纖陀螺儀
愛普生M-G365/M-G366是一款性能達到光纖陀儀(FOG)級別的高性能性測量裝置,作為新一代IMU標準,安裝簡單,具有新的姿態角輸出功能并支持各種應用,并且具有擴展卡爾曼濾波器的高速DSP能以

愛普生(EPSON)拓展其G系列IMU產品線,開發M-G366PDG和M-G330PDG
M-G366PDG和M-G330PDG兩款新的標準型號和基礎型號。愛普生已經在2023年春季開始量產。就讓南山電子小編通過本文來帶大家一起了解一下M-G366PDG和

M-G366PDG0規格書
°C至+85°C、電源電壓:3.3 V等特點。適用于自動駕駛車輛導航系統、振動控制和穩定、指向和跟蹤系統等場景,為各種應用場景提供了更加精確的控制和穩定性。體積小
發表于 01-12 09:32
?0次下載





 工商網監
工商網監
評論