 望獲實時Linux系統與Betaflight的結合:計算與飛控的完美協作
望獲實時Linux系統與Betaflight的結合:計算與飛控的完美協作
隨著無人機技術的迅猛發展,高性能計算和精確飛行控制的結合顯得尤為重要。在這一領域,望獲實時Linux系統和Betaflight飛控固件的結合為開發者提供了強大的工具鏈。本文將探討如何利用望獲實時Linux系統實現高級計算任務,同時通過Betaflight實現無人機的飛控功能。
一、望獲實時Linux與Betaflight的角色分工
- 望獲實時Linux的優勢
1.1實時性:
主要特點是其任務調度的確定性。這意味著系統能夠在指定的時間窗口內響應事件,而不會受到其他任務或系統負載的影響。
通過優化內核和調度器,顯著降低了任務響應的延遲,從而滿足實時任務對時間精度的需求。
允許高優先級任務搶占低優先級任務,確保關鍵任務能夠及時執行。
與專用的實時操作系統(RTOS)相比,實時Linux的特性使其可以靈活定制,滿足特定行業的需求,同時利用Linux強大的生態系統和豐富的工具鏈。
實時Linux支持多任務并行運行,并通過實時調度器確保每個任務在預定時間內完成。
計算能力強:望獲實時Linux系統支持豐富的編程語言(如Python、C++、Rust等)和軟件庫(如OpenCV、TensorFlow、PyTorch等),可以執行復雜的計算任務。例如,通過使用OpenCV處理圖像數據,結合TensorFlow實現深度學習算法,可以讓無人機具備目標識別和路徑規劃的能力。
1.2 開放性和靈活性:
望獲實時Linux支持多種硬件架構(如x86、ARM)。這意味著開發者可以根據具體需求選擇合適的硬件平臺,并靈活部署各種軟件工具。無論是用于科研實驗還是產品開發,望獲實時Linux都能很好地適應。
1.3 網絡支持:
望獲實時Linux擁有強大的網絡功能,可以通過WiFi、以太網或蜂窩網絡(4G/5G)實現遠程通信、數據傳輸以及實時監控。這對于無人機的遠程控制和任務管理尤為關鍵。
- Betaflight的優勢
專業的飛控功能:Betaflight是為多旋翼無人機專門設計的飛控固件,具有出色的姿態控制能力和快速響應速度。它支持多種飛行模式(如角度模式、水平模式、全手動模式),可以適應不同的飛行任務需求。
傳感器支持:Betaflight內置了對常見傳感器的支持,包括IMU(加速度計和陀螺儀)、氣壓計和GPS。這些傳感器為無人機提供了精確的姿態信息和環境數據。
易于調試:通過Betaflight Configurator圖形化界面,開發者可以方便地調整飛行參數、校準傳感器和監控飛行狀態。這種直觀的調試工具使得開發流程更加高效。
二、系統架構設計
結合望獲實時Linux和Betaflight的無人機系統采用分布式架構,兩個核心模塊分別承擔不同的任務,望獲實時Linux在任務之間和任務與硬件之間的通信中,通過優化機制提高了效率和可靠性:
2.1 任務間通信(IPC)
- 望獲實時Linux支持共享內存、信號量、管道、消息隊列等多種 IPC 機制。
- 使用實時補丁后,這些機制可以在更低的延遲下運行。
- 適合高頻通信的低延遲方法如 POSIX 信號和實時消息隊列被廣泛使用。
2.2 硬件通信
2.3 飛控模塊(Betaflight)
姿態解算:飛控模塊通過IMU傳感器采集無人機的加速度和角速度數據,并使用卡爾曼濾波器等算法計算無人機的實時姿態。
控制輸出:根據姿態和遙控器信號,飛控模塊生成控制命令,通過PWM或DSHOT信號驅動電機,保持無人機的穩定飛行。
傳感器集成:飛控模塊可以處理GPS數據,實現航點飛行或返回起點功能。
2.4 計算模塊(望獲實時Linux系統)
路徑規劃:通過Dijkstra算法、A*算法或深度強化學習方法,計算模塊可以規劃最優飛行路徑,避免障礙物并節約能源。
目標檢測:結合深度學習算法(如YOLO、Mask RCNN),無人機可以識別和跟蹤目標,例如監控某一區域內的人員活動。
數據分析與傳輸:收集飛控模塊的數據(如姿態、速度),在本地進行分析后,通過網絡上傳至服務器,實現遠程監控。
2.5 通信模塊
硬件連接:通常通過UART接口實現望獲實時Linux與Betaflight的通信。UART接口簡單可靠,但數據傳輸速率有限;需要更高帶寬時,可以選擇USB接口。
協議支持:MSP(Multiwii Serial Protocol)是Betaflight使用的主要通信協議,支持從飛控讀取數據和發送指令。
數據同步:為了減少延遲和誤差,通信模塊需要實現數據的實時同步,例如通過時間戳校準數據包。
三、硬件選擇
- 主控板(望獲實時Linux系統)
樹莓派(Raspberry Pi):成本低、生態完善,適合入門級開發。
NVIDIA Jetson Nano:具備GPU加速能力,適合運行AI模型。
RK3588開發板:性能強大、接口豐富,適合需要多任務并行的場景。
選擇要點:優先選擇具有豐富I/O接口和低功耗的主控板,以便兼容飛控板和外接傳感器。 - 飛控板(Betaflight)
F4飛控板:性能可靠,適合一般任務。
F7飛控板:支持更多外設和傳感器,計算能力更強。
H7飛控板:性能頂級,適合高要求的復雜飛控任務。
選擇要點:根據無人機尺寸、任務復雜度選擇合適的飛控板,同時確保其固件版本與Betaflight兼容。
四、系統實現
- 硬件連接
使用UART接口連接望獲實時Linux主控與飛控板,推薦使用屏蔽線減少干擾。
為確保電氣安全,使用電平轉換器匹配不同模塊的電壓。
若需要連接額外傳感器(如激光雷達、攝像頭),可通過I2C或SPI接口擴展硬件。 - 軟件配置
Betaflight設置:
在Betaflight Configurator中啟用MSP協議,設置波特率(例如115200)。
校準IMU、配置飛行模式,確保飛控板處于工作狀態。
望獲實時Linux系統設置:
安裝串口工具(如minicom或pyserial)。
編寫Python或C++腳本,與飛控板通信并處理數據。 - 數據交互
發送指令:望獲實時Linux通過MSP協議向飛控發送飛行模式切換指令或PID參數調整命令。
接收數據:飛控將傳感器數據實時回傳至望獲實時Linux,包括姿態、速度、高度等。
數據處理:望獲實時Linux對接收到的數據進行濾波和分析,為下一步任務提供依據。 - 任務分配
望獲實時Linux系統:運行ROS(Robot Operating System)或定制框架,處理復雜任務。
Betaflight飛控:專注實時姿態控制,保障飛行穩定性。
五、典型應用場景
- 智能無人機
功能:通過望獲實時Linux運行目標檢測算法(如YOLO),識別并跟蹤指定目標。
實現:飛控負責飛行,望獲實時Linux系統根據目標位置調整飛行路徑。 - 環境監測
功能:采集環境數據(如氣體濃度、溫濕度),并通過網絡上傳至云端。
實現:飛控負責航點飛行,望獲實時Linux系統處理傳感器數據。 - 配送無人機
功能:根據配送任務規劃最優路徑,完成貨物運輸。
實現:望獲實時Linux進行路徑優化,飛控負責姿態穩定。
六、開發中的挑戰與解決方案
- 通信延遲
挑戰:望獲實時Linux與Betaflight間的通信延遲可能導致控制滯后。
解決方案:優化協議,降低數據包大小,提高波特率;必要時使用實時操作系統(如RT望獲實時Linux)。 - 任務協調
挑戰:復雜任務可能導致望獲實時Linux系統負載過高。
解決方案:使用多線程技術,優先處理關鍵任務;將部分計算任務下放至硬件加速模塊(如GPU)。 - 功耗問題
挑戰:無人機的電池容量有限,運行高性能計算時功耗較高。
解決方案:優化算法,減少計算復雜度;選擇低功耗硬件并使用電源管理模塊。
七、結語
望獲實時Linux與Betaflight的結合為無人機開發提供了一個靈活、高效的解決方案。望獲實時Linux強大的計算能力與Betaflight的專業飛控功能相輔相成,使得無人機在各種復雜任務中如虎添翼。通過合理的系統設計和軟硬件協作,可以最大限度地發揮兩者的優勢,推動無人機技術邁向新的高度。
審核編輯 黃宇
-
Linux系統
+關注
關注
4文章
595瀏覽量
27444 -
無人機
+關注
關注
230文章
10471瀏覽量
181182
發布評論請先 登錄
相關推薦
望獲實時Linux系統與大語言模型深度融合,開創實時智能無限可能!
HPLC通信與云計算的結合 HPLC通信信號處理方法
linux是實時系統還是分時操作系統
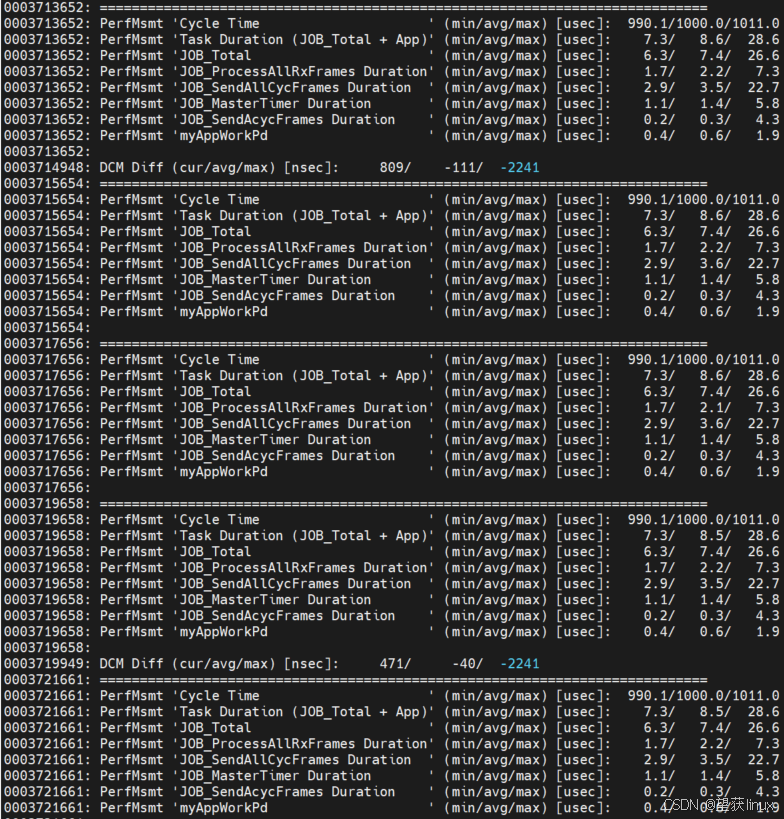
工控強芯 望獲實時Linux+飛騰E2000Q CPU=1毫秒控制周期最大抖動僅7微秒

工控重磅|望獲實時Linux適配AnyControl,大大提升高級控制+實時性
云計算與邊緣計算的結合
智慧體育館:實時監控與智能管理的完美結合
基于望獲實時Linux的高性能運動控制器適配
基于望獲實時Linux和飛騰E2000Q CPU的全國產工控解決方案
實時Linux:解鎖高效能和可靠性的關鍵





 工商網監
工商網監
評論