


紅外遙控器概況
紅外線遙控是目前使用最廣泛的一種通信和遙控手段。 由于紅外線遙控裝置具有體積小、 功耗低、 功能強、 成本低等特點, 因而, 繼彩電、 錄像機之后, 在錄音機、 音響設備、 空凋機以及玩具等其它小型電器裝置上也紛紛采用紅外線遙控。 工業設備中, 在高壓、 輻射、 有毒氣體、 粉塵等環境下, 采用紅外線遙控不僅完全可靠而且能有效地隔離電氣干擾。
紅外遙控系統:
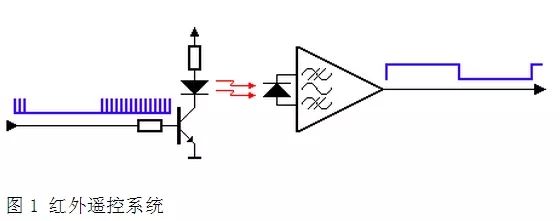
通用紅外遙控系統由發射和接收兩大部分組成, 應用編/解碼專用集成電路芯片來進行控制操作, 如圖1所示。 發射部分包括鍵盤矩陣、 編碼調制、 LED紅外發送器; 接收部分包括光、 電轉換放大器、 解調、 解碼電路。
紅外的簡單發射接收原理:
在發射端,輸入信號經放大后送入紅外發射管發射,在接收端,接收管收到紅外信號后,由放大器放大處理后還原成信號,這就是紅外的簡單發射接收原理。
1紅外遙控系統結構
紅外遙控系統的主要部分為調制、發射和接收,如圖1所示:
紅外遙控是以調制的方式發射數據,就是把數據和一定頻率的載波進行“與”操作,這樣既可以提高發射效率又可以降低電源功耗。
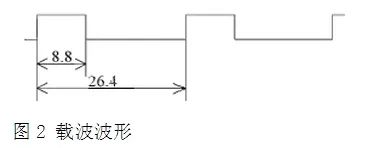
調制載波頻率一般在30khz到60khz之間,大多數使用的是38kHz,占空比1/3的方波,如圖2所示,這是由發射端所使用的455kHz晶振決定的。在發射端要對晶振進行整數分頻,分頻系數一般取12,所以455kHz÷12≈37.9kHz≈38kHz。
目前有很多種芯片可以實現紅外發射,可以根據選擇發出不同種類的編碼。由于發射系統一般用電池供電,這就要求芯片的功耗要很低,芯片大多都設計成可以處于休眠狀態,當有按鍵按下時才工作,這樣可以降低功耗芯片所用的晶振應該有足夠的耐物理撞擊能力,不能選用普通的石英晶體,一般是選用陶瓷共鳴器,陶瓷共鳴器準確性沒有石英晶體高,但通常一點誤差可以忽略不計。
紅外線通過紅外發光二極管(LED)發射出去,紅外發光二極管(紅外發射管)內部構造與普通的發光二極管基本相同,材料和普通發光二極管不同,在紅外發射管兩端施加一定電壓時,它發出的是紅外線而不是可見光。
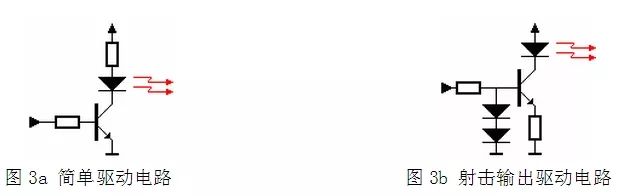
如圖3a和圖3b是LED的驅動電路,圖3a是最簡單電路,選用元件時要注意三極管的開關速度要快,還要考慮到LED的正向電流和反向漏電流,一般流過LED的最大正向電流為100mA,電流越大,其發射的波形強度越大。
圖3a電路有一點缺陷,當電池電壓下降時,流過LED的電流會降低,發射波形強度降低,遙控距離就會變小。
圖3b所示的射極輸出電路可以解決這個問題,兩個二極管把三級管基極電壓鉗位在1.2V左右,因此三級管發射極電壓固定在0.6V左右,發射極電流IE基本不變,根據IE≈IC,所以流過LED的電流也基本不變,這樣保證了當電池電壓降低時還可以保證一定的遙控距離。
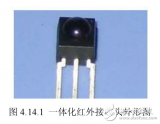
2一體化紅外接收頭
紅外信號收發系統的典型電路如圖1所示,紅外接收電路通常被廠家集成在一個元件中,成為一體化紅外接收頭。內部電路包括紅外監測二極管,放大器,限副器,帶通濾波器,積分電路,比較器等。紅外監測二極管監測到紅外信號,然后把信號送到放大器和限幅器,限幅器把脈沖幅度控制在一定的水平,而不論紅外發射器和接收器的距離遠近。交流信號進入帶通濾波器,帶通濾波器可以通過30khz到60khz的負載波,通過解調電路和積分電路進入比較器,比較器輸出高低電平,還原出發射端的信號波形。注意輸出的高低電平和發射端是反相的,這樣的目的是為了提高接收的靈敏度。一體化紅外接收頭,如圖4a、4b所示:
圖4a、b
紅外接收頭的種類很多,引腳定義也不相同,一般都有三個引腳,包括供電腳,接地和信號輸出腳。根據發射端調制載波的不同應選用相應解調頻率的接收頭。
紅外接收頭內部放大器的增益很大,很容易引起干擾,因此在接收頭的供電腳上須加上濾波電容,一般在22uf以上。有的廠家建議在供電腳和電源之間接入330歐電阻,進一步降低電源干擾。
紅外發射器可從遙控器廠家定制,也可以自己用單片機的PWM產生,家庭遙控推薦使用紅外發射管(L5IR4-45)的可產生37.91KHz的PWM,PWM占空比設置為1/3,通過簡單的定時中斷開關PWM,即可產生發射波形。
紅外編解碼解析
1編碼格式
現有的紅外遙控包括兩種方式:PWM(脈沖寬度調制)和PPM(脈沖位置調制)。
兩種形式編碼的代表分別為NEC 和PHILIPS 的RC-5、RC-6 以及將來的RC-7。
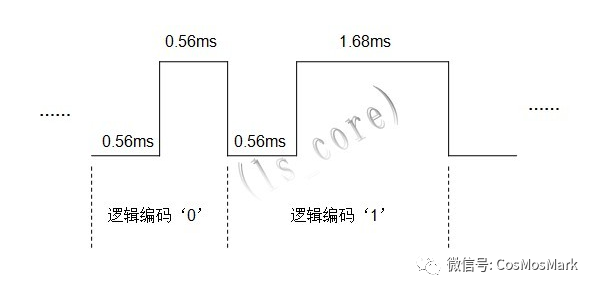
PWM(脈沖寬度調制):以發射紅外載波的占空比代表“0”和“1”。為了節省能量,一般情況下,發射紅外載波的時間固定,通過改變不發射載波的時間來改變占空比。例如常用的電視遙控器,使用NEC upd6121,其“0”為載波發射0.56ms,不發射0.56ms;其“1”為載波發射0.56ms,不發射1.68ms;此外,為了解碼的方便,還有引導碼,upd6121 的引導碼為載波發射9ms,不發射4.5ms。upd6121 總共的編碼長度為108ms。
但并不是所有的編碼器都是如此,比如TOSHIBA 的TC9012,其引導碼為載波發射4.5ms,不發射4.5ms,其“0”為載波發射0.52ms,不發射0.52ms,其“1”為載波發射0.52ms,不發射1.04ms。
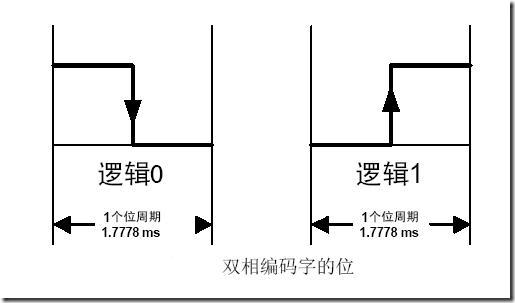
PPM(脈沖位置調制):以發射載波的位置表示“0”和“1”。從發射載波到不發射載波為“0”,從不發射載波到發射載波為“1”。其發射載波和不發射載波的時間相同,都為0.68ms,也就是每位的時間是固定的。
通過以上對編碼的分析,可以得出以某種固定格式的“0”和“1”去學習紅外,是很有可能不成功的。即市面上所宣傳的可以學習64 位、128 位必然是不可靠的。
另外,由于空調的狀態遠多于電視、音像,并且沒有一個標準,所以各廠家都按自己的格式去做一個,造成差異更大。比如:美的的遙控器采用PWM 編碼,碼長120ms 左右;新科的遙控器也采用PWM 編碼,碼長500ms 左右。如此大的差異,如果按“位”的概念來講,應該是多少位呢?64?128?顯然都不可能包含如此長短不一的編碼。
1紅外遙控編碼格式
紅外遙控器的編碼格式通常有兩種格式:NEC 和RC5
NEC 格式的特征:
1:使用38 kHz 載波頻率
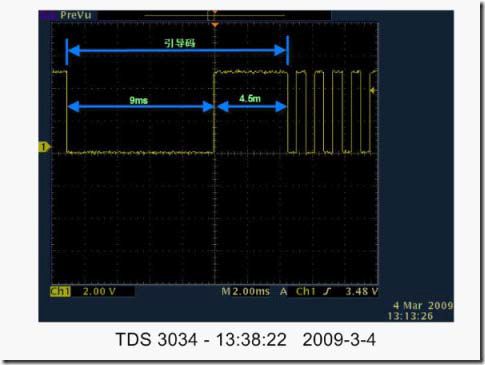
2:引導碼間隔是9 ms + 4.5 ms
3:使用16 位客戶代碼
4:使用8 位數據代碼和8 位取反的數據代碼
不過需要將波形反轉一下才方便分析:
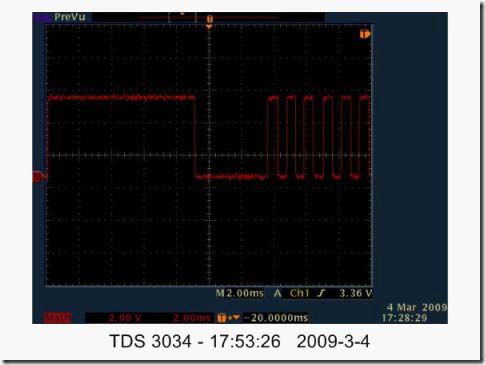
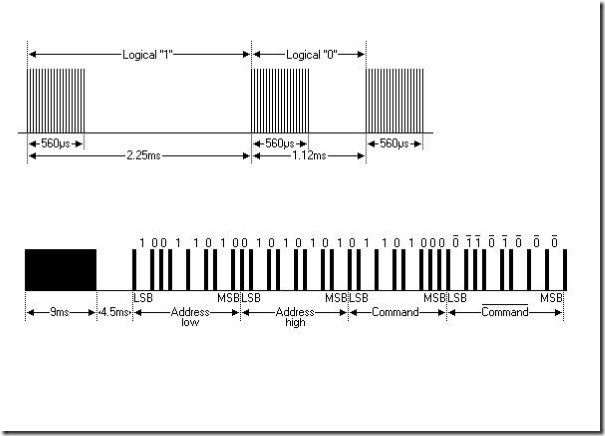
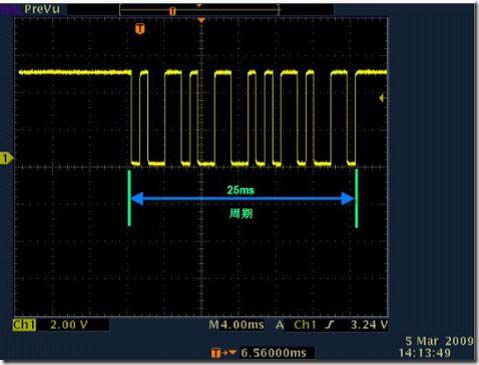
NEC 協議通過脈沖串之間的時間間隔來實現信號的調制(英文簡寫PWM) 。 邏輯“0”是由0.56ms的38KHZ載波和0.560ms 的無載波間隔組成; 邏輯“1”是由0.56ms 的38KHZ 載波和1.68ms 的無載波間隔組成; 結束位是0.56ms 的38K 載波。
下面實例是已知 NEC 類型遙控器所截獲的波形: 遙控器的識別碼是Address=0xDD20;其中一個鍵值是Command=0x0E;
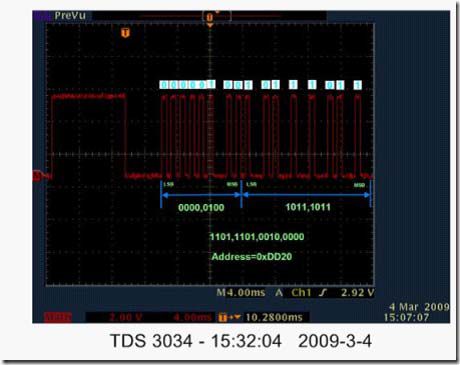
注意: 波形先是發低位地址再發高位地址。 所以0000,0100,1011,1011 反轉過來就是1101,1101,0010,000 十六進制的DD20;鍵值波形如下:
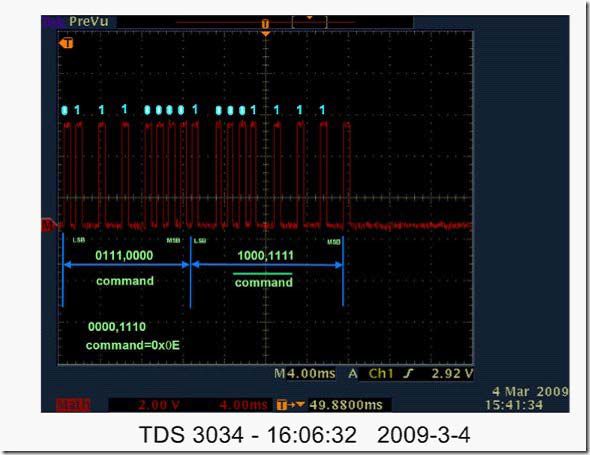
也是要將0111,0000 反轉成0000,1110得到十六進制的0E; 另外注意8 位的鍵值代碼是取反后再發一次的,如圖0111,0000 取反后為1000,1111。 最后一位是一個邏輯“1”。
RC5 編碼相對簡單一些: 同樣由于取自紅外接收頭的波形需要反相一下波形以便于分析:
反相后的波形:
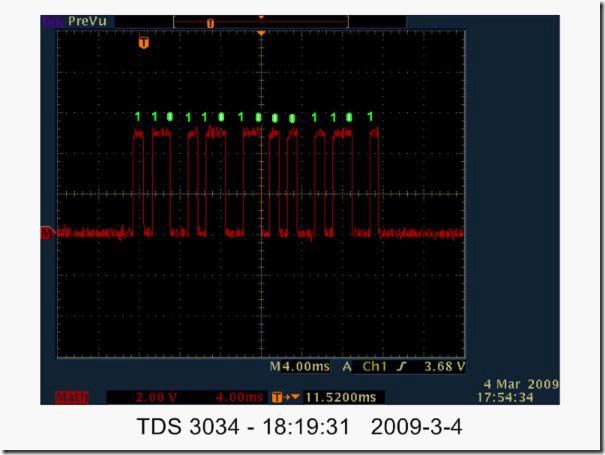
根據編碼規則:
得到一組數字: 110, 11010, 001101根據編碼定義:
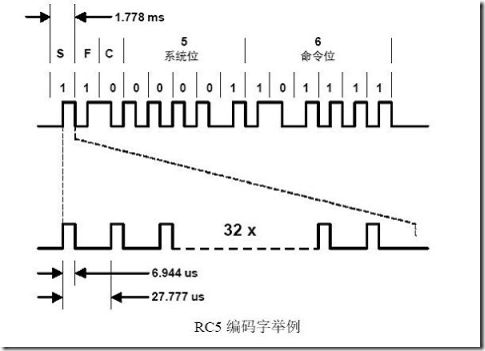
第一位是起始位S通常是邏輯1
第二位是場位F通常為邏輯1, 在RC5 擴展模式下它將最后6位命令代碼擴充到7 位代碼(高位MSB) , 這樣可以從64 個鍵值擴充到128 個鍵值。
第三位是控制位C它在每按下了一個鍵后翻轉, 這樣就可以區分一個鍵到底是一直按著沒松手還是松手后重復按。
如圖所示是同一按鍵重復按兩次所得波形, 只有第三位是相反的邏輯, 其它的位邏輯都一樣。
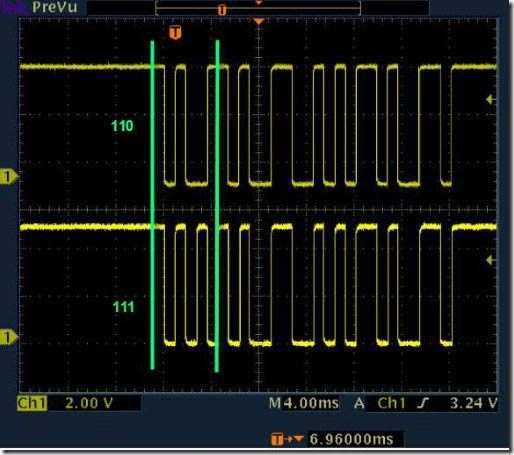
其后是五個系統地址位:11010=1A, 最后是六個命令位:001101=0D。
-
紅外遙控
+關注
關注
22文章
350瀏覽量
46506
原文標題:紅外遙控編解碼詳解!
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
藍牙學習型紅外線遙控器(NEC協議編解碼)

基于STM32的紅外遙控和解碼遙控程序解析


紅外遙控解碼原理講解





 工商網監
工商網監

評論