


一、引言
這篇文章是來自Automatic Addison的開源項目,已獲作者授權轉載自github。本項目的主要內容是使用myCobot 280機械臂結合ROS2系統搭建機械分揀站。
原文鏈接來自:https://github.com/automaticaddison/mycobot_ros2
作者博客: https://automaticaddison.com/create-and-visualize-a-robotic-arm-with-urdf-ros-2-jazzy/
作者在他的博客中提供了關于如何從頭開始構建ROS2項目的詳細教學。但是如果想快速測試該項目,可以按照下文介紹的步驟進行操作。
二、準備工作與技術介紹
1、開發環境
本教程在Ubuntu 24.04中使用ROS2 Jazzy進行了測試和驗證。盡管它應該在其他環境中工作,但建議按照指定設置中的說明來獲得最佳的兼容性和性能,或者使用Docker拉取鏡像(在Ubuntu20.04中成功測試)。請確保RViz、MoveIt、Gazebo和其他組件的正確配置正確,以減少不必要的錯誤。本文所使用的編譯語言為Python。
2、技術介紹
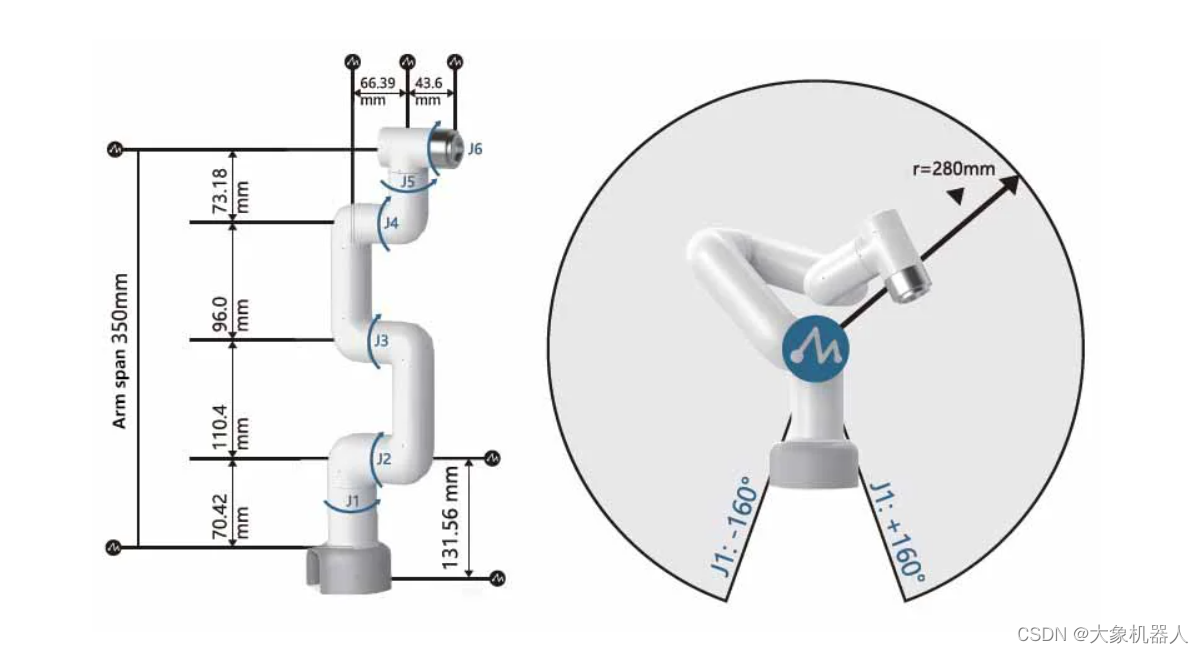
myCobot 280系列簡介:myCobot 280系列機械臂是專門為研究、教育、技術應用和商業展覽而開發的6-DOF協作機器人。由于它們是輕量級的桌面機械臂,因此它們非常適合所有年齡段的開發人員來學習和探索機器人技術。我們為開發人員提供了開源的機械臂urdf模型來使用。
ROS1: https://github.com/elephantrobotics/mycobot_ros
ROS2: https://github.com/elephantrobotics/mycobot_ros2
三、項目運行
1、復制項目
mkdir ~/ros2_ws/ Cd ~/ros2_ws/ git clone https://github.com/automaticaddison/mycobot_ros2
如果你不熟悉ROS2或者不了解具體文件夾中的內容,可以參閱這篇文章https://automaticaddison.com/naming-and-organizing-packages-in-large-ros-2-projects/或者重新學習有關ROS2的內容。
2、拉取鏡像(使用Docker)
確保你的Docker是可以使用的,然后使用Ctrl+Alt+T來打開新的終端,輸入需求并按下Enter。
cd ~/ros2_ws/mycobot_ros2/docker/ bash build.sh
如果你的terminal運行成功,將會顯示這樣的頁面
3、開始運行Container
docker-compose up --build
如果你的terminal運行成功,將會顯示這樣的頁面
Ctrl + C
停止測試并繼續
docker-compose up -d manipulation
 如果你的terminal運行成功,將會顯示這樣的頁面?
如果你的terminal運行成功,將會顯示這樣的頁面?
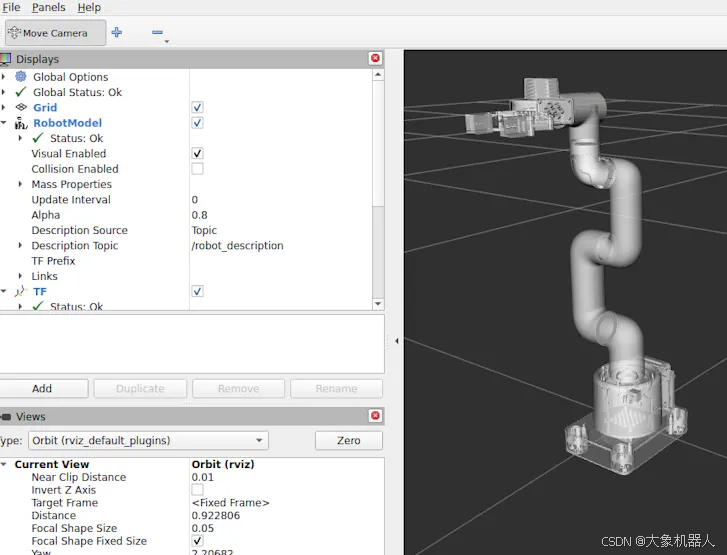
4、在Rviz中測試機械臂
xhost + docker-compose exec manipulation bash ros2 launch mycobot_description robot_state_publisher.launch.py
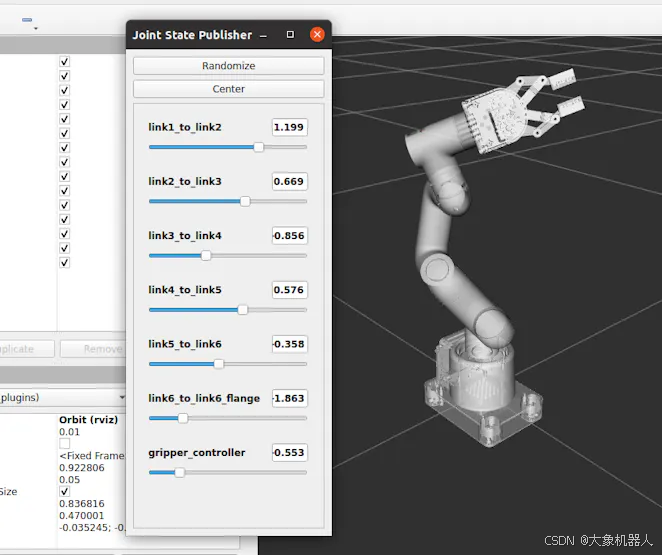
可以使用 SliderBars 調整機器人和機械爪的狀態
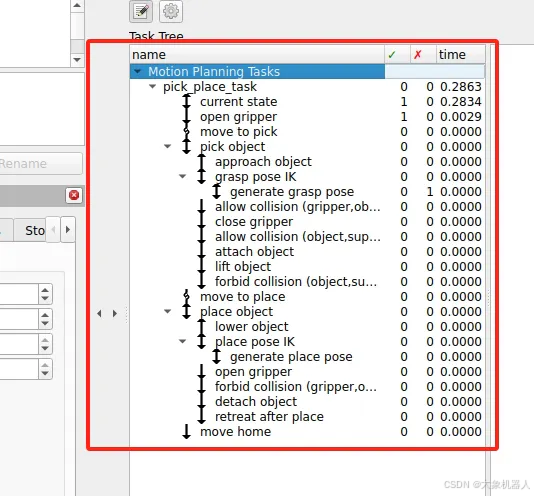
5、測試運動規劃任務
確保你仍然處于Dicker的container中,然后打開終端
echo "alias pointcloud='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/pointcloud.sh'" >> ~/.bashrc echo "alias pick='bash ~/ros2_ws/src/mycobot_ros2/mycobot_mtc_pick_place_demo/scripts/robot.sh'" >> ~/.bashrc
然后按下Enter來激活演示
pick
還可以在Rviz中學習更多運動規劃項目
四、 總結
再次感謝作者Addison。雖然本文是以用戶身份對項目進行快速安裝和測試,但Addison 提供了從 ROS2 安裝到項目施工的詳細講解和教程,他的文章也非常適合想要系統完整地學習 ROS2的初學者(https://automaticaddison.com/tutorials/ )。
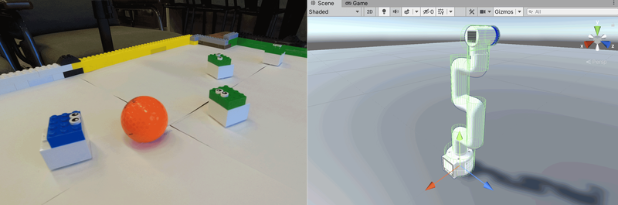
如果你想用真實的機械臂測試這個模擬項目,myCobot 280 系列非常適合你。如果你有其他關于機械臂使用的好的想法想要實現的話,也歡迎在下方留言和我們溝通,你的點贊和留言是對我們最大的支持!
-
機器人
+關注
關注
213文章
29748瀏覽量
212890 -
開源
+關注
關注
3文章
3689瀏覽量
43832 -
Ubuntu
+關注
關注
5文章
592瀏覽量
31244 -
機械臂
+關注
關注
13文章
554瀏覽量
25396 -
大象機器人
+關注
關注
0文章
86瀏覽量
121
原文標題:使用myCobot 280機械臂結合ROS2系統CH成功搭建機械分揀站!
文章出處:【微信號:ElephantRobotics,微信公眾號:大象機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
myCobot 280 2023全新功能,手柄控制、自干涉檢測

使用myCobot 280 Jeston Nano進行物體精確識別追蹤
結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(下)

系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
六軸機械臂免費使用,學習ROS、Python火熱報名中
myCobot機械臂應用于Unity機器人編程實戰課

Mycobot機械臂各關節的運動(三)
使用 Python 和可視化編程控制樹莓派機械臂myCobot


開源六軸機械臂myCobot 280末端執行器實用案例解析

結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(上)
如何使用PLC控制myCobot 320機械臂






 工商網監
工商網監

評論