

通用人形機器人旨在快速適應(yīng)現(xiàn)有的以人類為中心的城市和工業(yè)工作空間,處理繁瑣、重復(fù)或體力要求高的任務(wù)。這些移動機器人經(jīng)過設(shè)計,能在以人類為中心的環(huán)境中有出色的表現(xiàn),從工廠車間到醫(yī)療保健機構(gòu),它們的價值日益凸顯。
模仿學(xué)習(xí)是機器人學(xué)習(xí)的一個子集,它能讓人形機器人通過觀察和模仿人類專家的示范來獲取新技能。在真實世界中收集這些廣泛、高質(zhì)量的數(shù)據(jù)集既繁瑣又耗時,而且成本往往高得令人卻步。從物理精確的仿真環(huán)境中生成的合成數(shù)據(jù)有助于加快這一收集過程。
NVIDIA Isaac GR00T為人形機器人開發(fā)者提供機器人基礎(chǔ)模型、數(shù)據(jù)管線和仿真框架,有助于應(yīng)對人形機器人開發(fā)中所面對的這些挑戰(zhàn)。用于合成運動生成的NVIDIA Isaac GR00T Blueprint是一個用于模仿學(xué)習(xí)的仿真工作流程,使開發(fā)者能夠從少量人類示范中生成數(shù)量呈指數(shù)級擴增的數(shù)據(jù)集。
視頻 1.借助 NVIDIA Isaac GR00T 簡化數(shù)據(jù)收集
在本文中,我們將介紹如何通過 Apple Vision Pro 捕捉遠(yuǎn)程操作數(shù)據(jù),使用 NVIDIA Isaac GR00T 從少數(shù)人類示范中生成大量合成軌跡數(shù)據(jù)集,然后在Isaac Lab中訓(xùn)練機器人運動策略模型。
合成運動生成
該工作流的包括以下關(guān)鍵組成部分:
GR00T-Teleop:
NVIDIA CloudXR:連接到 Apple Vision Pro 頭戴設(shè)備,使用專門為人形機器人遠(yuǎn)程操作設(shè)計的定制 CloudXR 運行時,實現(xiàn)動作的流暢傳輸 。
Isaac XR Teleop:將遠(yuǎn)程操作數(shù)據(jù)流式傳輸?shù)?strong>NVIDIA Isaac Sim或 Isaac Lab,作為 Apple Vision Pro 的參考應(yīng)用程序。
Isaac Lab:基于 Isaac Sim 的 Isaac Lab 是一個用于機器人學(xué)習(xí)的開源模塊化框架,使用這一框架,可以實現(xiàn)訓(xùn)練機器人策略。
GR00T-Mimic:通過少量人類示范生成大量合成運動軌跡數(shù)據(jù)。
GR00T-Gen:通過隨機化場景中的背景、光照和其他變量來增加多樣性,并通過NVIDIA Cosmos對生成的圖像進(jìn)行放大處理。(在本文中,我們不會詳細(xì)介紹 GR00T-Gen。)
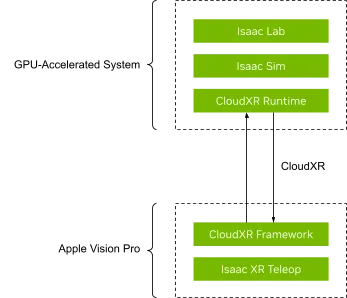
圖 1.遠(yuǎn)程操作架構(gòu)
合成運動生成管線是一個復(fù)雜的過程,旨在創(chuàng)建一個龐大且多樣化的數(shù)據(jù)集來訓(xùn)練機器人。
它從數(shù)據(jù)收集開始,在這個過程中,將使用像 Apple Vision Pro 這樣的高保真設(shè)備,在仿真環(huán)境中捕捉人類的動作和行為。Apple Vision Pro 將手部追蹤數(shù)據(jù)傳輸?shù)饺?Isaac Lab 的仿真平臺,同時仿真平臺將機器人環(huán)境的沉浸式視圖傳輸回該設(shè)備。這種設(shè)置使得機器人操作更加直觀和互動,有助于收集高質(zhì)量的遠(yuǎn)程操作數(shù)據(jù)。
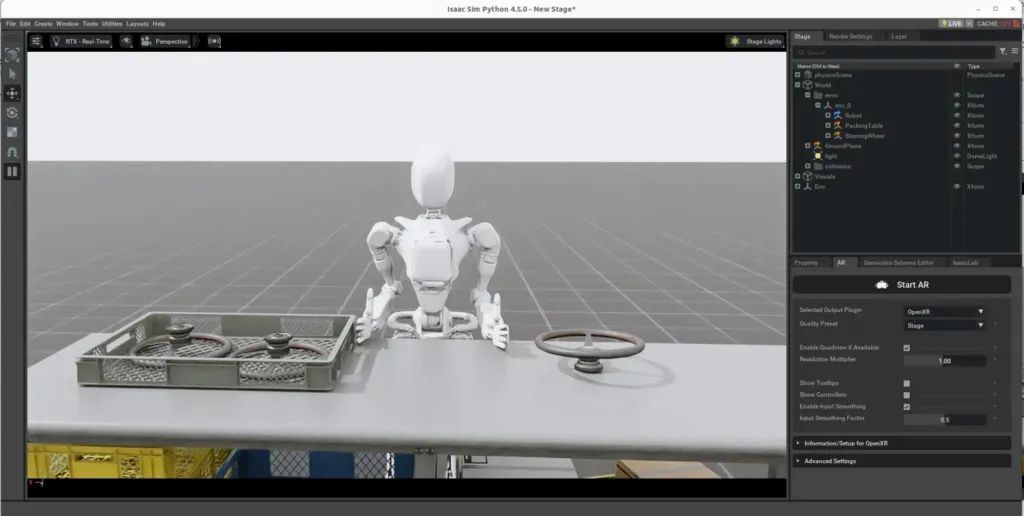
圖 2.準(zhǔn)備好通過 Apple Vision Pro 進(jìn)行遠(yuǎn)程操作的機器人
Isaac Lab 中的機器人仿真畫面被傳輸?shù)?Apple Vision Pro,讓您能夠可視化機器人的環(huán)境。通過移動手部,您可以直觀地控制機器人執(zhí)行各種任務(wù)。這種設(shè)置提供了沉浸式且互動的遠(yuǎn)程操作體驗。
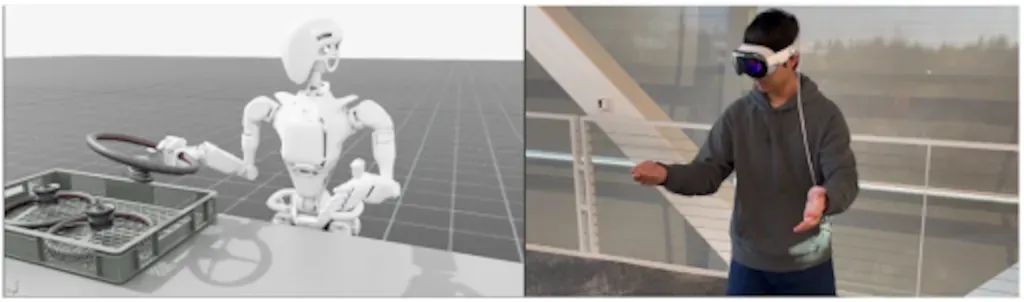
圖 3.Isaac Lab 中的遠(yuǎn)程操作
使用 GR00T-Mimic 生成合成軌跡
數(shù)據(jù)收集后,下一步是合成軌跡生成。使用 Isaac GR00T-Mimic 從少量人類示范中推算出大量合成運動軌跡。
這個過程包括在示范中標(biāo)記關(guān)鍵點,并使用插值法確保合成軌跡平滑且符合情境。然后對生成的數(shù)據(jù)進(jìn)行評估和優(yōu)化,以滿足訓(xùn)練所需的標(biāo)準(zhǔn)。
在這個示例中,我們成功生成了 1,000 條合成軌跡。
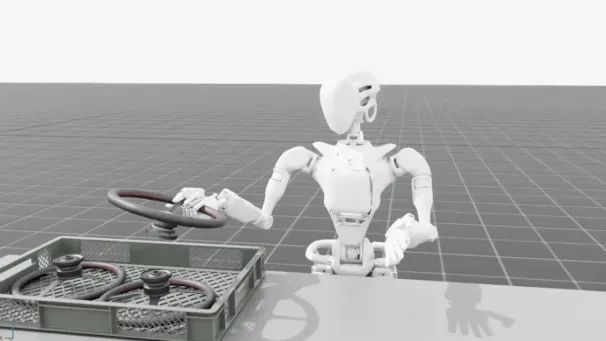
a.機器人
拿起輪子
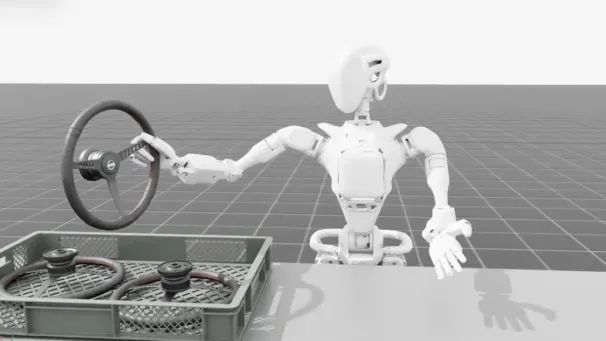
b.機器人將輪子
移到托盤
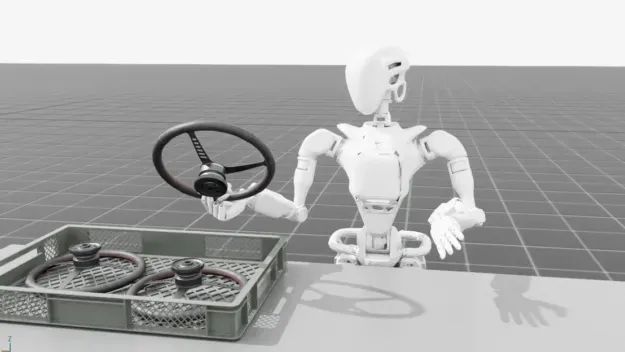
c.機器人將輪子
放到托盤上
圖 4.在 Isaac Lab 中生成的一組合成軌跡
在 Isaac Lab 中使用模仿學(xué)習(xí)進(jìn)行訓(xùn)練
最后,使用模仿學(xué)習(xí)技術(shù),利用合成數(shù)據(jù)集對機器人進(jìn)行訓(xùn)練。在這個階段,會訓(xùn)練一個策略,比如 Robomimic 套件的循環(huán)高斯混合模型(GMM),以模仿合成數(shù)據(jù)中的動作。
訓(xùn)練在比如 Isaac Lab 這樣的仿真環(huán)境中進(jìn)行,并且通過多次試驗來評估訓(xùn)練后的策略的性能。這個管線顯著減少了開發(fā)和部署機器人系統(tǒng)所需的時間和資源,使其成為機器人領(lǐng)域的一個有價值的工具。
為了展示如何使用這些數(shù)據(jù),我們訓(xùn)練了一臺帶有夾爪的 Franka 機器人,在 Isaac Lab 中執(zhí)行堆疊任務(wù)。這個夾爪類似于人形機器人的“手”。
我們使用了來自 Robomimic 套件的帶有循環(huán) GMM 策略的行為克隆方法。該策略使用了兩個隱藏維度為 400 的長短期記憶(LSTM)層。
網(wǎng)絡(luò)的輸入包括機器人末端執(zhí)行器的位姿、夾爪狀態(tài)以及相對物體的位姿,而輸出是一個用于在 Isaac Lab 中驅(qū)動機器人的增量位姿動作。
使用由 1,000 次成功示范組成的數(shù)據(jù)集,并經(jīng)過 2,000 次迭代,我們實現(xiàn)了大約 50 次迭代 / 秒的訓(xùn)練速度(相當(dāng)于在 NVIDIA RTX GPU 上大約 0.5 小時的訓(xùn)練時間)。在 50 次實驗的平均結(jié)果中,訓(xùn)練策略在堆疊任務(wù)中的成功率為 84%。
圖 5.在 Isaac Lab 中訓(xùn)練的夾爪
開始使用
在本文中,我們討論了通過 NVIDIA Isaac GR00T 生成合成軌跡數(shù)據(jù),加速推進(jìn)人形機器人運動策略學(xué)習(xí):
https://developer.nvidia.cn/isaac/gr00t
GR00T-Teleop 堆棧目前還處于僅限受邀用戶訪問的階段。加入人形機器人開發(fā)者計劃,以便在該堆棧進(jìn)入測試版時獲取使用權(quán)限:
https://developer.nvidia.com/humanoid-robot-program
-
Apple
+關(guān)注
關(guān)注
1文章
933瀏覽量
53237 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5149瀏覽量
104767 -
人形機器人
+關(guān)注
關(guān)注
4文章
581瀏覽量
17048
原文標(biāo)題:人形機器人訓(xùn)練新解:當(dāng) NVIDIA Isaac GR00T 遇上 Apple Vision Pro
文章出處:【微信號:Leadtek,微信公眾號:麗臺科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
NVIDIA發(fā)布GR00T N1基礎(chǔ)模型等方案,人形機器人開發(fā)效率顯著提升
NVIDIA Isaac GR00T N1開源人形機器人基礎(chǔ)模型+開源物理引擎Newton加速機器人開發(fā)
NVIDIA發(fā)布全球首個開源人形機器人基礎(chǔ)模型Isaac GR00T N1
機器人Blue亮相 搭載英偉達(dá)最新GR00T N1人形機器人通用基礎(chǔ)模型
深度解讀GR00T N1:英偉達(dá)開源人形機器人功能模型的技術(shù)革新與行業(yè)影響
NVIDIA 發(fā)布全球首個開源人形機器人基礎(chǔ)模型 Isaac GR00T N1——并推出加速機器人開發(fā)的仿真框架

智元機器人基于NVIDIA Isaac GR00T打造高效仿真數(shù)據(jù)采集方案

具身智能照進(jìn)現(xiàn)實,物理 AI 解人形機器人量產(chǎn)困局
NVIDIA發(fā)布Isaac GR00T Blueprint,加速人形機器人開發(fā)
NVIDIA推出Isaac GR00T Blueprint
NVIDIA發(fā)布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?

物理仿真人形機器人的統(tǒng)一全身控制策略

借助NVIDIA Project GR00T加速人形機器人開發(fā)

NVIDIA 加速人形機器人發(fā)展

NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進(jìn)的仿真技術(shù),加速 AI 機器人技術(shù)的發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論