") 實用指南:組合導航模塊SKM-4DX安裝使用詳解
實用指南:組合導航模塊SKM-4DX安裝使用詳解
為滿足車載導航對弱信號環(huán)境日益增長的高精度定位需求,SKYLAB研發(fā)推出采用衛(wèi)星/慣性組合導航技術的車載組合導航模塊——SKM-4DX。在前面,SKYLAB君有介紹過SKM-4DX的基本工作原理,本篇SKYLAB君將詳細介紹下組合導航模塊SKM-4DX的安裝使用。
組合導航模塊SKM-4DX
前面我們有提到,SKM-4DX導航模塊提出了衛(wèi)星導航精度的智能識別算法,基于組合導航提供的高精度導航信息,對衛(wèi)星導航的定位精度進行識別,如果衛(wèi)星導航精度比較好,則進行組合導航,一旦發(fā)現衛(wèi)星導航信號非常差甚至是丟失信號,則進行純慣性導航,就目前的市場應用,不夸張的說,SKM-4DX導航模塊已經實現了組合導航和純慣性導航的自主切換。
組合導航模塊SKM-4DX:
SKM-4DX是一款高性能的面向車載導航領域的車載組合導航模塊,采用GNSS/INS組合導航定位技術,憑借高精度六軸慣性器件和成熟的慣性算法,無需里程計或速度信號接入,且無嚴格安裝要求,即使在隧道、車庫等環(huán)境下也能為車輛提供高精度定位。
SKM-4DX外形尺寸緊湊,采用SMD焊盤,支持標準取放及回流焊接。
SKM-4DX具有高靈敏度、低功耗、強抗干擾、高可靠性等特點。
組合導航模塊SKM-4DX安裝使用:
組合導航模塊SKM-4DX安裝
1、模塊需要在上電前固定在車輛上,為保障使用效果,上電過程中禁止挪動模塊。
2、安裝方向要求摸摸看的X軸與車輛的前向(車輛行駛方向)保持大致一致。對于安裝角度誤差沒有嚴格限制;俯仰角安裝誤差、橫滾角安裝誤差在30度以內,航向角安裝誤差45度以內即可。
3、使用限制: 本產品僅適用于車載(加速度小于2g),需要剛體連接。
車載導航為什么選擇組合導航模塊:
1、可發(fā)現并標校慣導模塊誤差,提高導航精度;
2、彌補衛(wèi)星導航的信號缺損問題,提高導航能力;
3、正價觀測冗余度,提高異常誤差的監(jiān)測能力,提高系統的容錯功能;
4、提高導航系統的抗干擾能力,提高完好性。
更多組合導航模塊SKM-4DX的選型應用可直接訪問SKYLAB網站或者阿里店鋪,會有專業(yè)FAE工程師為您提供指導性應用建議。
-
組合導航
+關注
關注
0文章
10瀏覽量
7834 -
慣導模塊
+關注
關注
1文章
8瀏覽量
3360
發(fā)布評論請先 登錄
相關推薦
高精度GNSS+INS組合導航:速度、位置、姿態(tài)全掌握

ATGM332D-F8N:高性能單北斗多頻定位導航模塊數據手冊
TPS2373-4EVM-758評估模塊用戶指南

LORA模塊的安裝與配置指南
E108-GN系列GNSS多模衛(wèi)星導航定位模塊產品說明
ATGM336H-5N杭州中科微BDS定位導航模塊技術規(guī)范
ATGM336H-5N杭州中科微BDS定位導航模塊規(guī)格參數
ATGM336H-5N杭州中科微BDS/GNSS全星座定位導航模塊電氣參數
AT872-F8N高性能GNSS全模多頻定位導航模塊數據手冊
ATGM332D-F8N低功耗單北斗多頻定位導航模塊資料
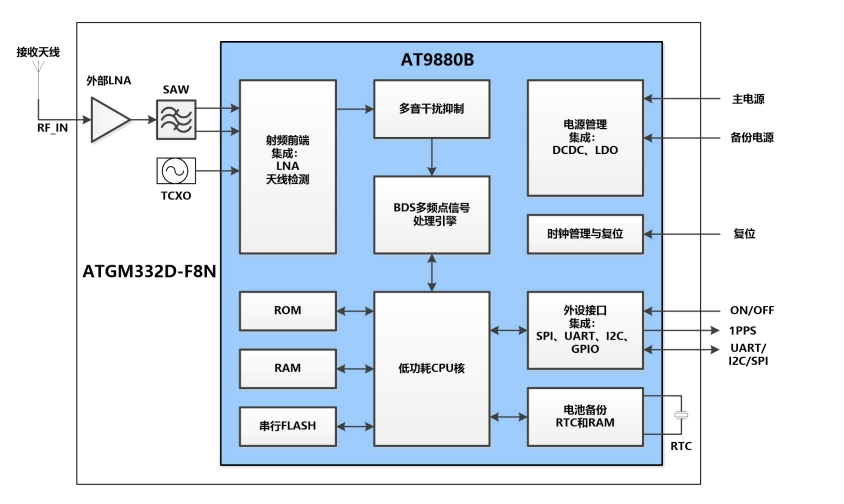
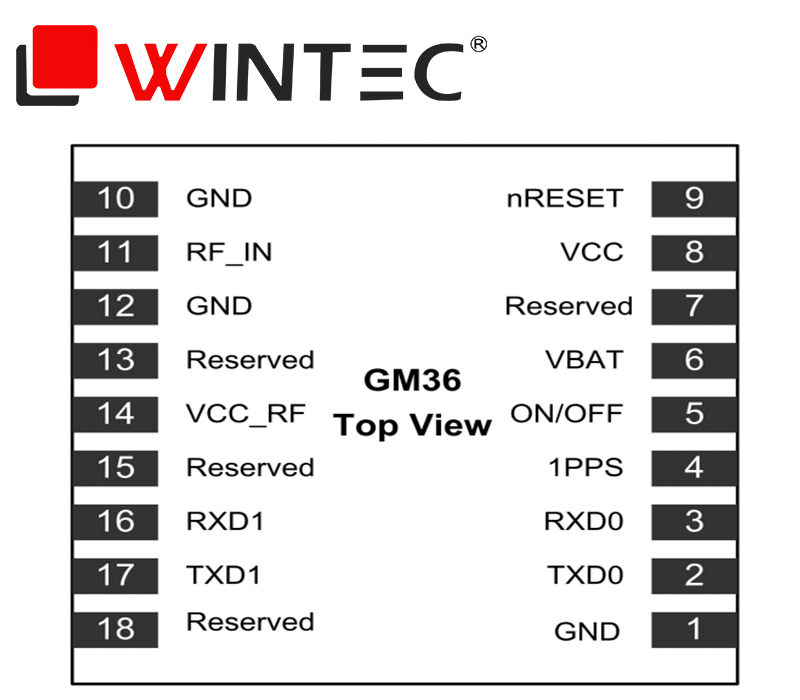
(杭州中科微)GM36全星座定位導航模塊數據手冊解讀
AGV小車上的慣性導航模塊運用——SGPM02

愛普生高精度慣性導航模塊賦能無人割草機新賽道






 工商網監(jiān)
工商網監(jiān)
評論