

概述
本指南將介紹如何使用泰克8通道5系列B MSO示波器的逆變器、電機和驅動器分析軟件對變頻驅動器的輸入、直流母線和輸出進行穩定、準確的電氣測量,以及對電機進行機械測量。
輸入(線路)測量
大多數工業和重型商用變頻驅動器都采用三相輸入。較小的驅動器可能使用單相線電壓。特別是在電動汽車和其他電池供電的應用中,驅動器通常采用直流供電。IMDA電源分析軟件支持所有這些配置(參見上集的“接線配置”)。在IMDA測量包中,電能質量測量組和諧波測量組用于計算驅動器的功耗以及驅動器對配電系統的預期影響。
電能質量
電能質量測量組包括表征驅動器功耗的測量。這些測量也可以用于驅動器的輸出(請參閱下面的“輸出測量”)。圖21顯示了電氣分析部分中的電能質量測量。選擇電能質量測量會生成相量圖、波形和測量標識。圖中顯示了已配置繞組的電能質量能量和功率數學波形。功率波形是使用數學算法將各相的電壓和電流波形相乘得出的。
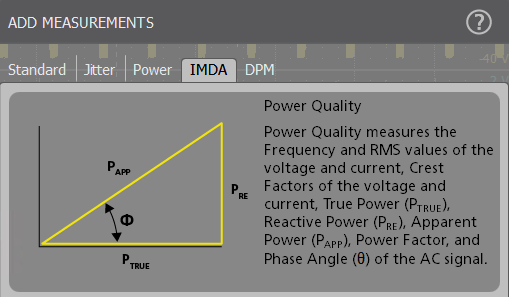
圖21. 在泰克IMDA軟件中,測量分為電能質量、諧波、紋波和效率。還提供DQ0和機械測量的選擇。
電能質量測量可用于確認探頭和接線配置是否正確。如果一個或多個功率測量顯示負讀數,請檢查您的電流探頭,確認與負功率讀數相關的通道上的探頭是否連接錯誤。對于三相系統,請檢查相量圖。正常情況下,各相電壓應基本相同,相位差為120°。
用戶可以選擇只測量基頻的電能質量,也可選擇測量所有頻率的電能質量。當選擇“基頻”選項時,將僅測量基頻分量。當選擇“所有頻率”選項時,將計算所有諧波(包括基頻)的電能質量測量值。
相量圖:圖22所示的相量圖是一個圓形圖,表示相電壓和相電流之間以及各相電壓和電流之間的幅度和相位角。理想情況下,一個平衡的三相系統具有幅度相等的矢量,且相鄰矢量的相位差正好是120°。
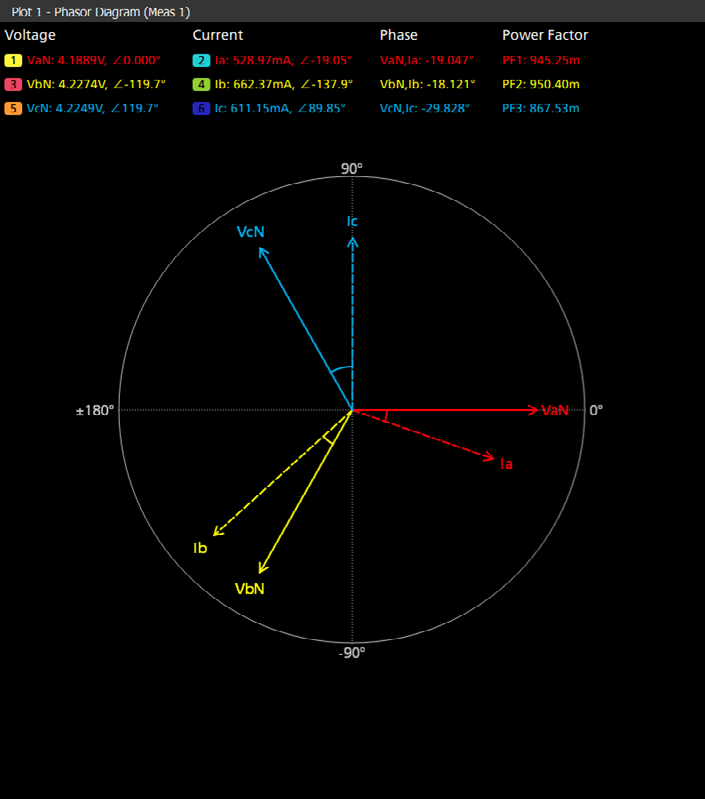
圖22. 相量圖顯示各相電壓和電流之間的關系。一眼可以看出該圖顯示了系統的平衡以及電壓和電流(電容或電感)之間的相移。
相量圖(圖22)給出了各相的以下測量值:
?相對于參考相電壓(圖22中的VaN)的RMS電壓和相位角
?相對于參考相電壓的RMS電流和相位角
?電壓和電流之間的相位
?功率因數
電能質量測量標識(示例見圖23)顯示了許多測量值。在此示例中,3V3I配置中提供各相的以下測量值:
VRMS
在整數個周期內測得的相電壓的RMS值。相電壓的數量因接線配置而異。
VMAG
在電機工作頻率下測得的相電壓幅值。工作頻率是電壓信號的基頻,通過應用快速傅里葉變換 (FFT)確定。
IRMS
在整數個周期內測得的相電流的RMS值。電流數量可能因接線配置而異。
IMAG
在電機工作頻率下測得的相電流信號的幅值。工作頻率是電流信號的基頻,通過應用FFT確定。
波峰因數(電壓波峰因素VCF和電流波峰因素ICF)
波峰電壓或電流與RMS電壓或電流的比值。( 正弦波的波峰因數為1.414。)
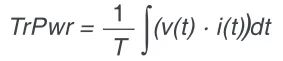
有功功率 (TrPwr)
有功功率通過以下公式確定:
在離散域中,公式為:
其中n = 1,2…N,N表示樣本數。

有功功率 (P) 是傳輸到負載電阻部分的實際功率,以瓦特為單位。請注意,只有純正弦波的有功功率才等于VRMS × IRMS × cos(φ),此時,φ表示電壓和電流波形之間的角度。
視在功率 (ApPwr)的計算公式為:
ApPwr = VRMS× IRMS
其中VRMS和IRMS根據電壓和電流波形計算得出。
單位為VA。
請注意,此處不能對MATH1功率波形執行RMS計算,否則將得出錯誤的結果。
無功功率 (RePwr)的計算公式為:

單位是VAR,即無功伏安。
功率因數 (PF)的計算公式為:
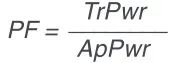
作為兩個功率的比值,功率因數被認為是無量綱數。這種計算比使用相位余弦更可取,因為不僅考慮了基頻,還考慮了所有測得的頻率分量。
相位角 (Phase)的計算公式為:

單位是度。與功率因數計算一樣,該計算方法考慮了整個測量頻譜。
對于任何多相系統,電能質量測量結果給出以下總計數量:
? 頻率 (Freq) 根據低通濾波邊沿信號的周期計算得出。
?總有效功率 (STrPwr) 是所有相的有效功率之和。
?總無功功率 (SRePwr) 是所有相的無功功率之和。
?總視在功率 (SApPwr) 是所有相的視在功率之和。
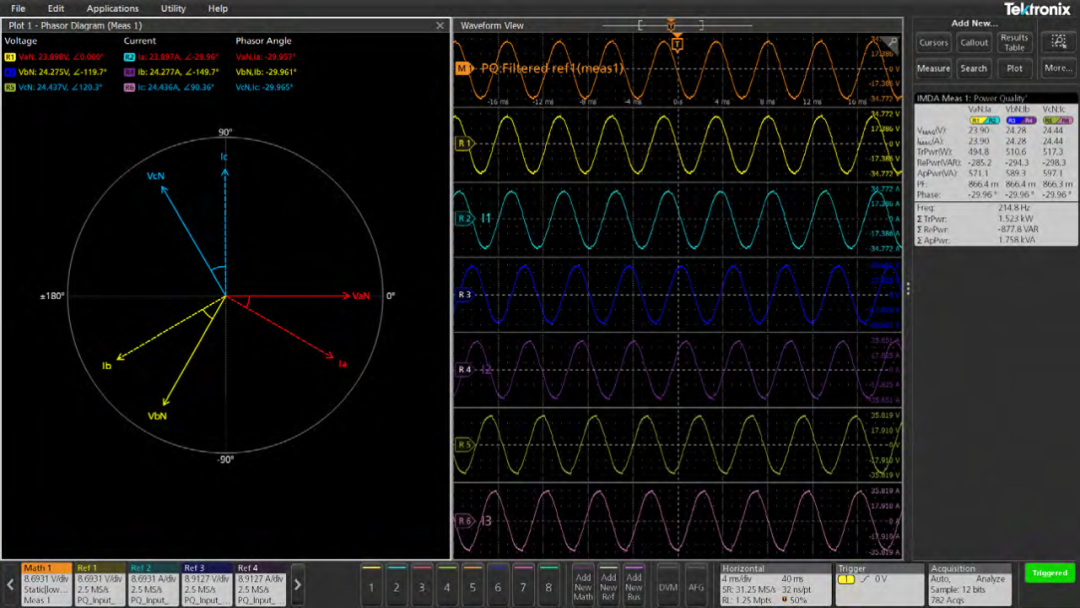
圖23. 電機驅動器輸入(線路)側的電能質量測量。
諧波
諧波測量呈現基頻及其諧波處的信號幅度,并測量信號的RMS幅度和總諧波失真。可以根據IEEE-519或IEC 61000-3-2標準或自定義限制來評估測量結果。例如,可以將IEC61000-3-12標準的限制以csv文件的形式加載,并根據這些限制進行測試。測試結果可以記錄在詳細報告中,注明是否合格。
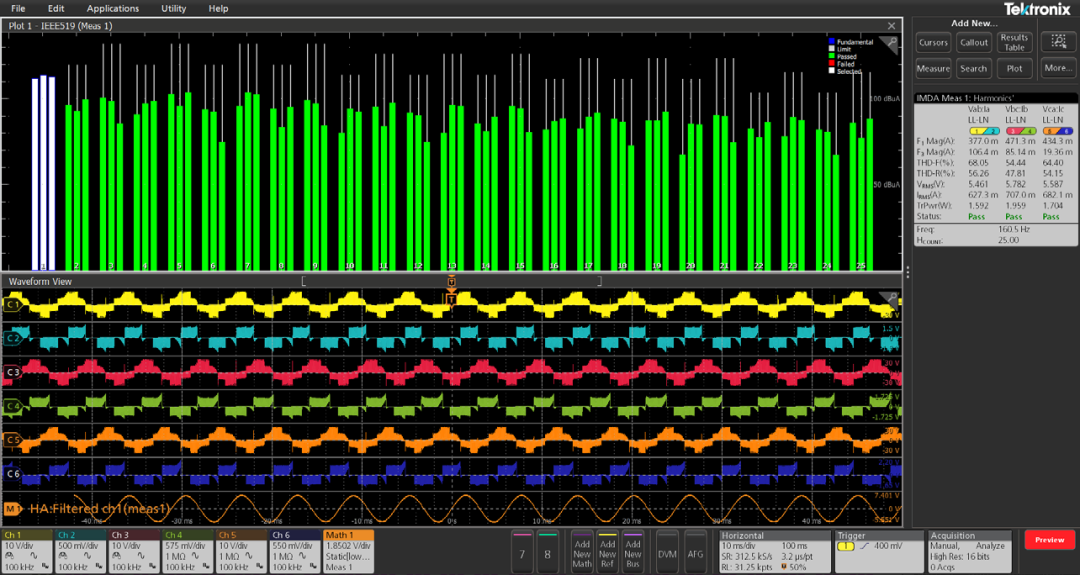
圖24. 諧波可以在電機驅動器的輸入和輸出上測量。此例顯示了驅動器三相輸出上的諧波。
直流母線測量
紋波可以在兩個不同的測試點測量,即在直流母線和開關半導體上測量。
線路紋波:該測量提供相應交流電壓信號的線路頻率部分的RMS和峰 - 峰值測量值。
開關紋波:該測量提供相應電壓信號的RMS和峰峰值測量值。
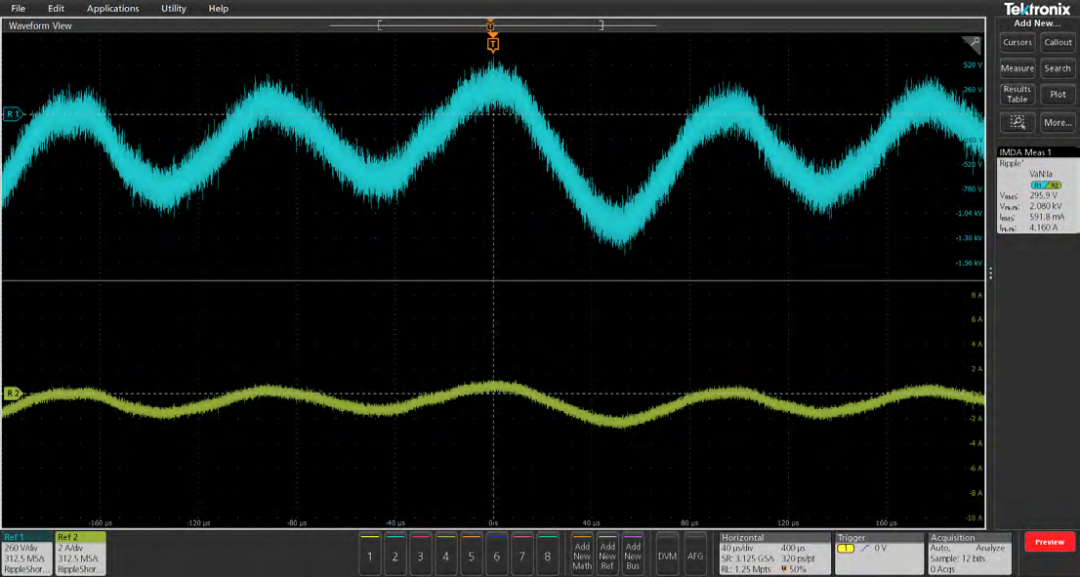
圖25. 直流母線上的紋波。
開關分析
圖26. 開關損耗測量有助于優化逆變器設計。
在設計或驗證變頻驅動器內的開關電路時,了解與驅動器開關階段相關的損耗非常重要。選項5-PWR和6-PWR提供開關損耗測量和斜率。電壓探頭連接到開關的兩端,而電流探頭連接用于測量流經開關的電流。
可以添加多個測量來獲取各開關的測量值。
5/6-PWR分析包包括以下測量:
開關損耗:測量開關器件開啟、關閉和傳導區域中的平均瞬時功率或能量。該測量將創建一個功率波形,而功率波形是根據每對V和I波形計算得出的。
dv/dt:測量電壓從基準參考水平(RB)上升到最高參考水平(RT)或從最高參考水平(RT)下降到基準參考水平(RB)過程中的變化率(斜率)。該測量將創建一個功率波形,而功率波形是根據每對電壓和電流波形計算得出的。
di/dt:測量電流從基準參考水平(RB)上升到最高參考水平(RT)或從最高參考水平(RT)下降到基準參考水平(RB)過程中的變化率(斜率)。該測量將創建一個功率波形,而功率波形是根據每對電壓和電流波形計算得出的。
直接正交零點 (DQ0) 的變換和測量
Clarke和Park變換通常用于簡化磁場定向控制系統的實施。顯示了一個磁場定向控制系統的示例。在該控制系統中,這些變換用于將施加到電機的三相電壓轉換為正交D矢量和Q矢量。這些簡化的矢量可以輕松轉換和集成,以保持所需的速度。然后可以使用逆變換來創建逆變器中脈沖寬度調制的驅動信號。
這些D矢量和Q矢量可能位于數字信號處理模塊(例如 FPGA)的深處,并且可能無法直接測量。IMDA軟件提供DQ0分析選項,可以通過簡單的設置根據三相輸出電壓或電流得出D和Q的測量值,從而可以快速輕松地查看控制系統的調整效果。
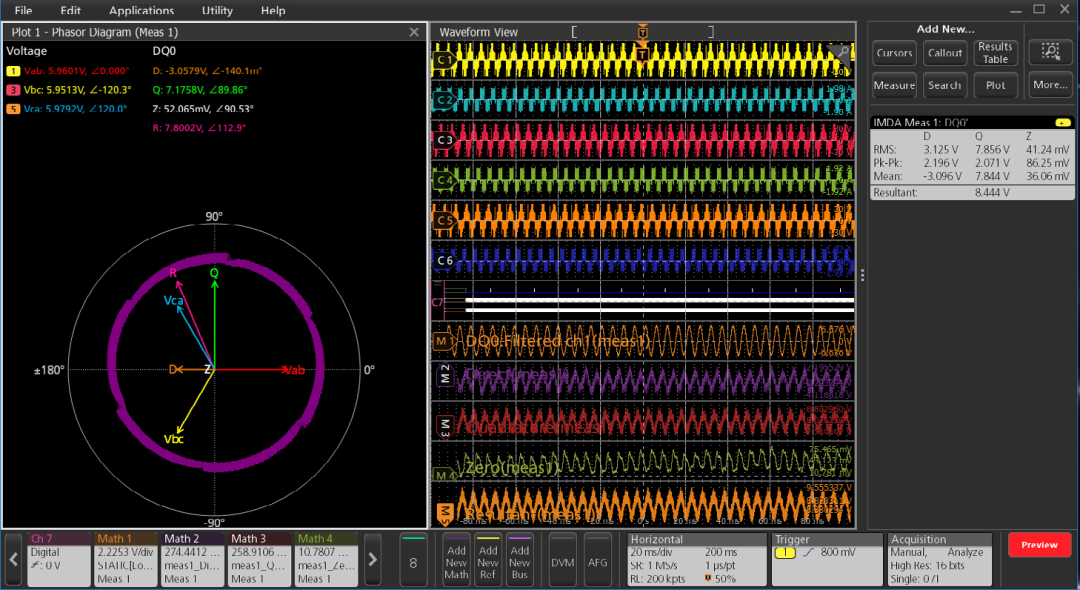
圖27. DQ0相量圖顯示D矢量、Q矢量和合成矢量(R),其中電機速度和方向反饋由正交編碼器傳感器提供。
除了D矢量和Q矢量,分析軟件還顯示合成矢量 (R)。R矢量是通過計算D矢量和Q矢量上各采樣點的D和Q斜邊矢量得出的。R矢量的起始角度是為0度,根據正交編碼器接口(QEI)的索引脈沖(Z)確定。增量角度由QEI根據編碼器每轉脈沖數(PPR)和電機的極對數計算得出。通過觀察R矢量旋轉,可以確認控制系統是否正在平穩地驅動電機。還可以查看換向次數。請注意,上方圖27中R矢量圖中的六個失真點對應于六個換向步驟。圖28顯示了DQ0測量的源設置示例。除了選擇源和接線方式之外,還可以指定可應用于所有源或僅用于邊沿限定器的低通濾波器。這有利于減少由于電磁干擾(EMI)拾取和開關噪聲引起的噪聲。
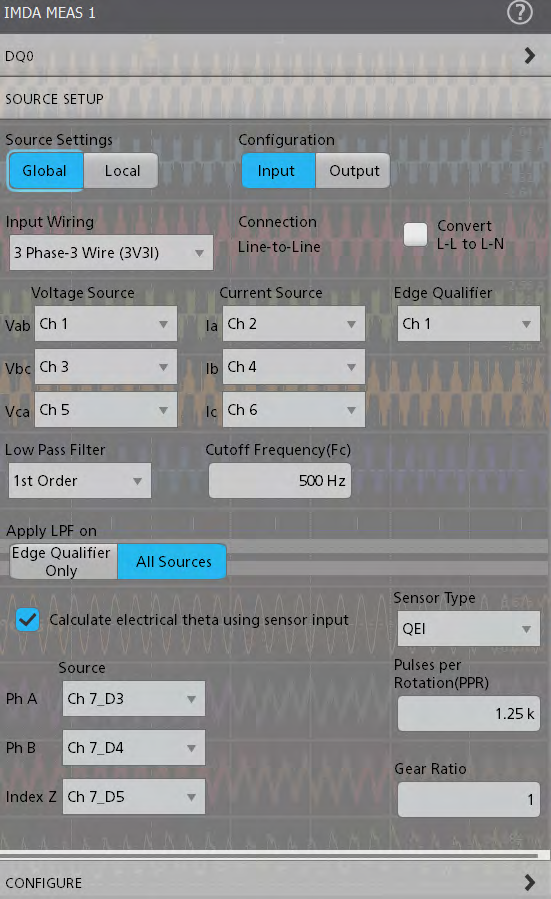
圖28. 配置示波器以在使用正交編碼器接口 (QEI) 的系統上進行DQ0測量。
輸出測量
PWM驅動器的輸出波形很復雜,由與載波相關的高頻分量和與驅動電機的基頻相關的低頻分量構成。使用示波器對PWM波形進行測量可能頗具挑戰,因為很難實現穩定的觸發。
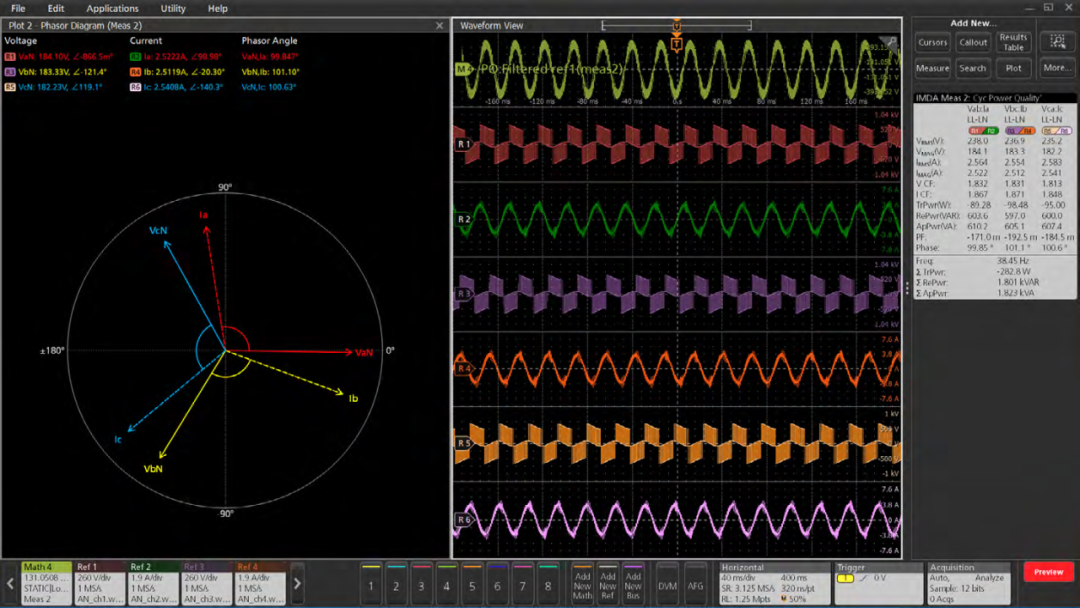
圖29. 此處顯示的PWM波形包括一個頻率可達數百千赫茲的載波和電機對其做出響應的較低頻率平均電壓。
棘手的是,波形是在低頻下進行調制的。因此,高頻測量(例如總rms電壓、總功率等)必須在高頻下進行,但要覆蓋輸出波形中低頻分量的整數個周期。
IMDA軟件的主要優勢之一是能夠對PWM波形進行穩定的測量。該軟件能夠解調用戶指定為“邊沿限定器”的通道上的PWM波形,并將包絡提取為“數學通道”。這使測量能夠實現精確的同步。
在變頻驅動器輸入上使用的相同電能質量和諧波測量也可用于驅動器的輸出,用于測量電壓、電流、相位和功率。詳細介紹見本指南的“輸入測量”部分。除單相三線配置僅可用作輸入測量外,相同的接線配置可同時用于輸入和輸出測量。
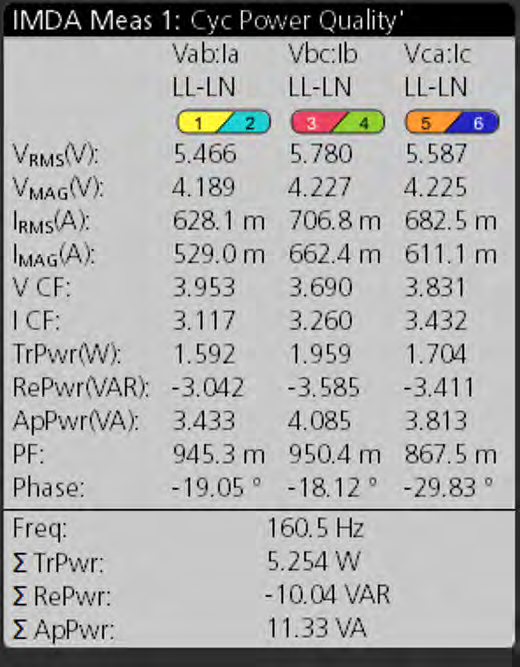
圖30. 電能質量測量組提供了一組快速穩定的PWM輸出測量的概覽,包括電壓、電流、相位角、有功功率、視在功率、無功功率和功率因數。
效率測量
效率測量是指相應輸入和輸出電壓和電流對的輸出功率與輸入功率的比值。在5系列和6系列MSO上,輸入和輸出均采用雙功率表法(V1*I1和V2*I2)。如此可以使用八個輸入通道完成三相輸入和輸出功率的完整測量,如圖31所示。
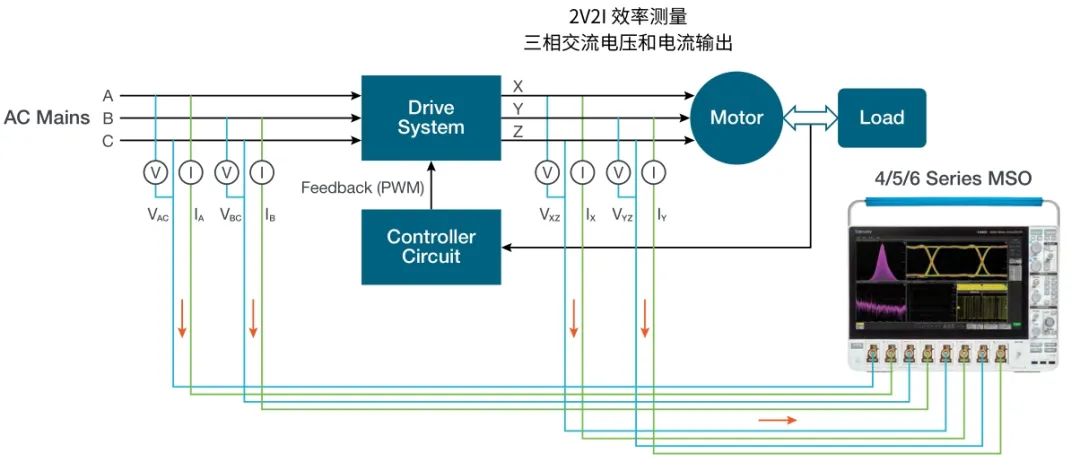
圖31. 使用8個示波器輸入通道測量三線輸入三線輸出系統的驅動效率。
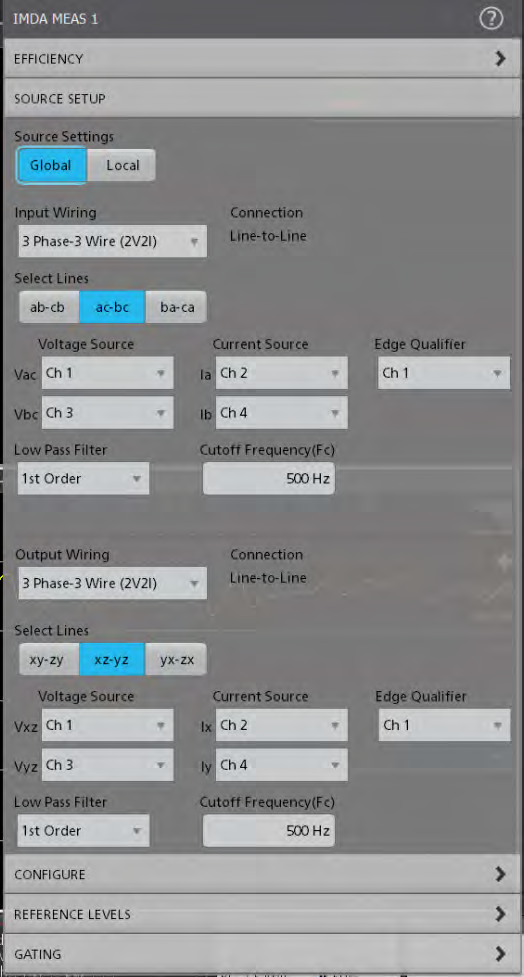
圖32. 使用5/6系列MSO示波器進行效率測量的三線輸入三線輸出配置設置。
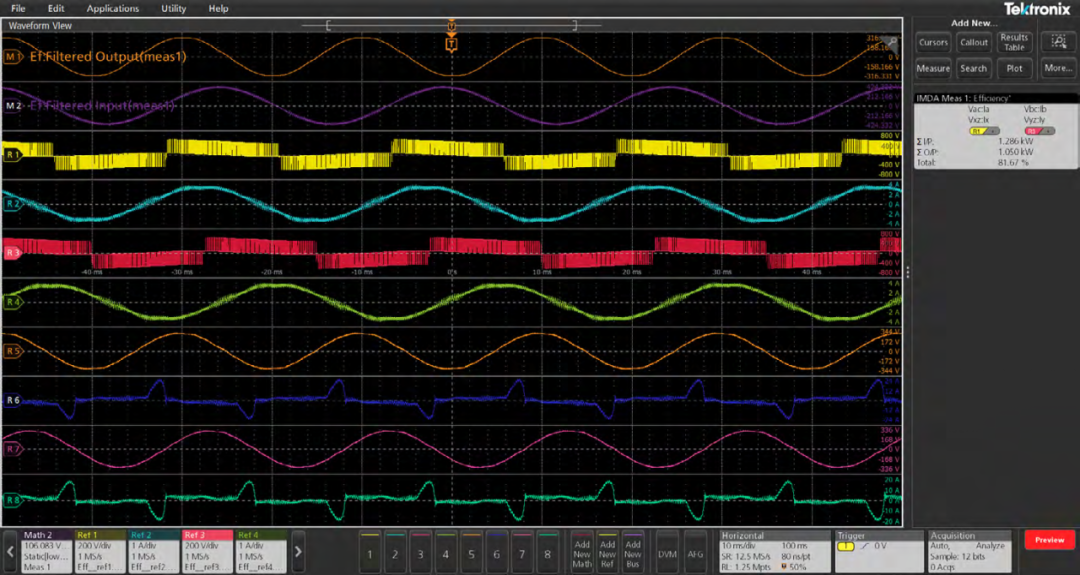
圖33. 使用雙功率表法對變頻驅動器的輸入和輸出進行效率測量。
機械測量
機械電機測量,例如角位置、旋轉方向、速度、加速度和扭矩的測量,為控制系統提供了重要的反饋。根據電機和控制系統的類型,使用不同類型的傳感器來測量機械參數。電機速度通常用每分鐘轉數(RPM)或繞固定軸的每分鐘完整轉數來表示。加速度指速度變化率。扭矩是電機在其輸出軸上產生的旋轉力,通常以牛頓米(Nm)和英尺磅(ft-lbs)為單位。扭矩可用于確定電機的機械功率輸出。而機械功率可以與電功率一起用來計算總系統效率。
泰克開發的帶5/6-IMDAMECH選項的電機驅動分析軟件支持以下換能器:
?霍爾效應傳感器
?正交編碼器
?旋轉變壓器
?扭矩傳感器
對于具有固定扭矩常數的電機,該軟件還支持基于電機電流的扭矩測量。
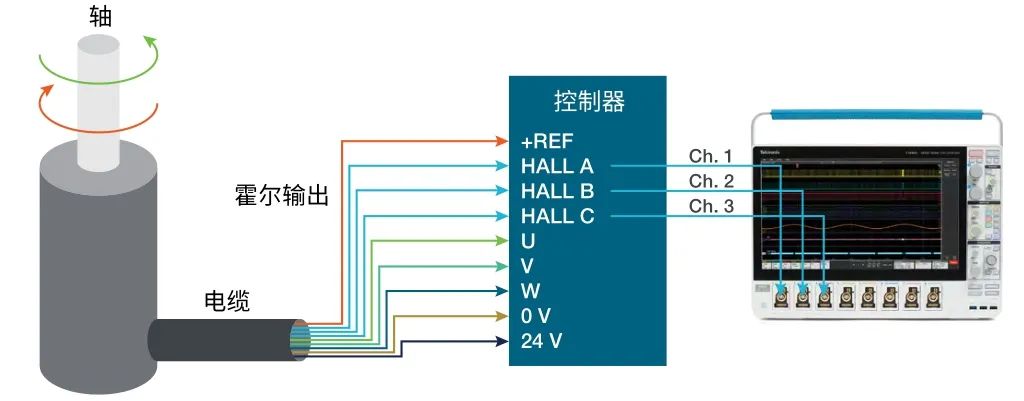
圖34. 5/6系列MSO示波器可以連接到霍爾效應傳感器的輸出端,以測量速度加速度和方向。
霍爾效應傳感器用于為控制系統提供位置反饋。例如,霍爾效應傳感器在無刷直流電機中用于監控轉子位置以實現同步換向。傳感器輸出可用于計算速度、加速度和方向。此外,霍爾傳感器輸出與速度成正比的脈沖,通常三個一組使用。
IMDA軟件可以使用霍爾傳感器輸出來測量電機速度和加速度,如圖36所示。在設置測量參數時,需要指定極對數和齒輪比,以便軟件可以正確測量速度。可以使用TPP1000無源探頭或高壓差分探頭,例如THDP0200或THDP0100,具體取決于電機輸出功率和噪音水平。在5系列或6系列MSO上,還可以在任意示波器通道上使用TLP58邏輯探頭來測量傳感器輸出脈沖。在其中一個FlexChannel輸入上使用邏輯探頭,即可將輸入轉換為八個邏輯通道,從而使單個通道能夠支持多個霍爾傳感器。將電機轉速與速度測量值進行比較即可驗證連接是否正確。
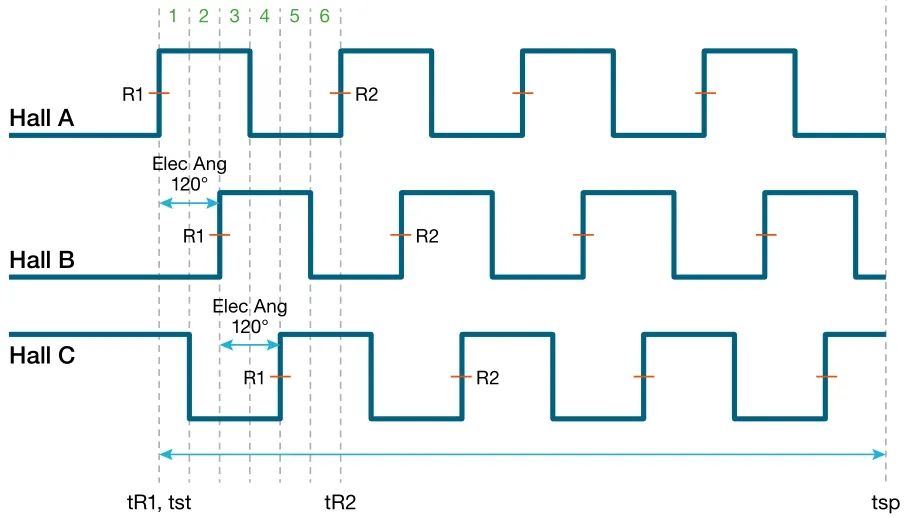
圖35. 三個霍爾傳感器提供反饋,控制系統根據反饋確定轉子位置。此例顯示了四極對電機的六步換向。機械旋轉的開始時間為 tst。旋轉結束時間為tsp。一次機械旋轉包含四個電循環。IMDA軟件可以利用這些信息來測量速度、方向和加速度。
機械轉速是指轉子旋轉一圈所需的時間(以秒為單位)。速度以每分鐘轉數(RPM)表示。

其中停止時間 (tsp) 和開始時間 (tst) 之差表示轉子的一次機械旋轉。極對數(如圖36所示)決定了每次機械旋轉由多少個電周期組成。齒輪比G可用來表示電機轉子和輸出軸之間的任何齒輪傳動。
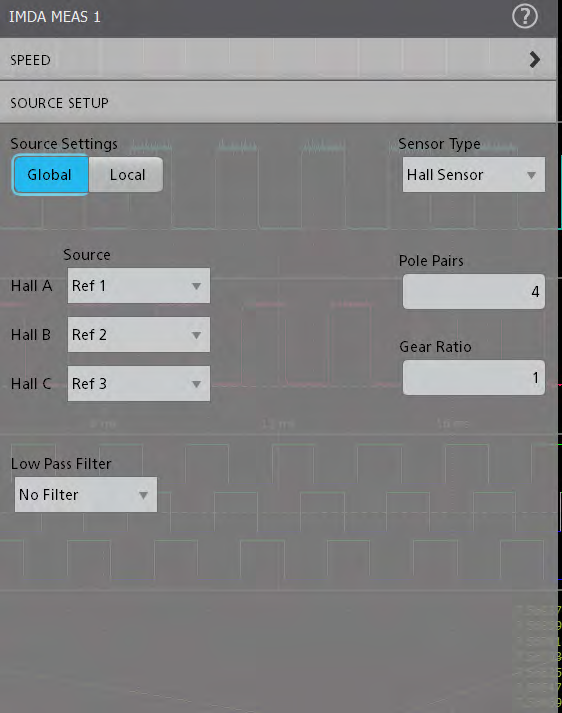
圖36. 為使用霍爾傳感器的系統配置示波器速度測量。
加速度指單位時間內速度的變化率。

IMDA軟件根據霍爾傳感器輸出的上升沿順序或下降沿順序來確定電機的旋轉方向。要測量方向,必須指定極對數。請看圖37所示的兩極對電機,其中A、B和C代表相距120°的三個霍爾傳感器位置。第一個轉子磁鐵的北極(N1)在0度處與霍爾傳感器A相交并輸出一個上升沿。如果配置的旋轉方向是順時針(A-B-C),N1接下來將與霍爾傳感器B相交,與霍爾傳感器A成120度角。但N2與霍爾傳感器C僅成60度,并將首先與霍爾傳感器C相交。因此,對于兩極對電機,脈沖邊沿順序將為A-C-B。
IMDA軟件還將霍爾傳感器A上的第一個上升沿與120度后的下一個上升沿進行比較,以驗證方向。例如,如果第一個上升沿來自霍爾傳感器A,并且在120度處測量到霍爾傳感器B的上升沿,則可以確定轉子旋轉順序為A-B-C,在此示例中為順時針。如果在120度之后在霍爾傳感器C上測量到上升沿,則旋轉順序為A-C-B或逆時針。
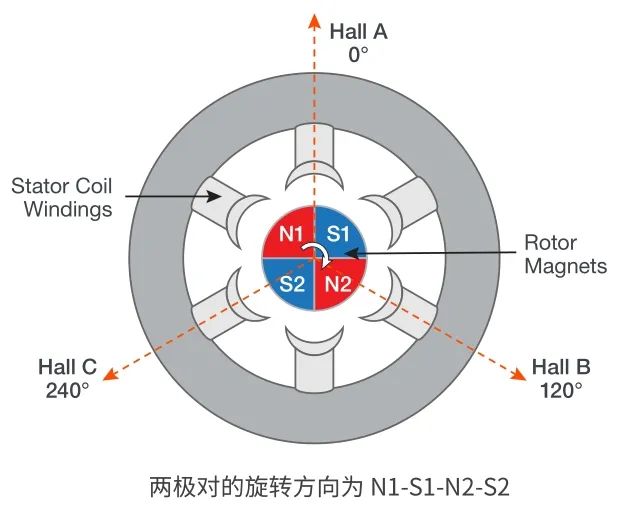
圖37. 要確定旋轉方向,必須知道轉子上的極對數。
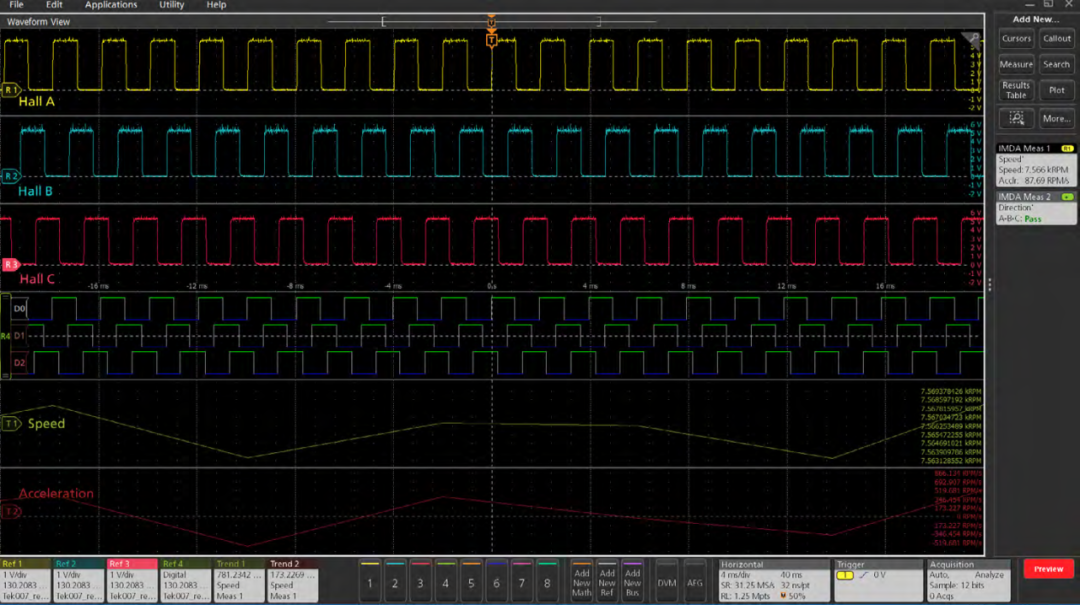
圖38. 霍爾傳感器波形和測量。顯示屏底部的兩條線分別為速度和加速度的趨勢圖。
正交編碼器接口 (QEI)
正交編碼器接口(QEI)由安裝在旋轉軸上的開槽盤、光源(LED)和光接收器(光電晶體管)組成。
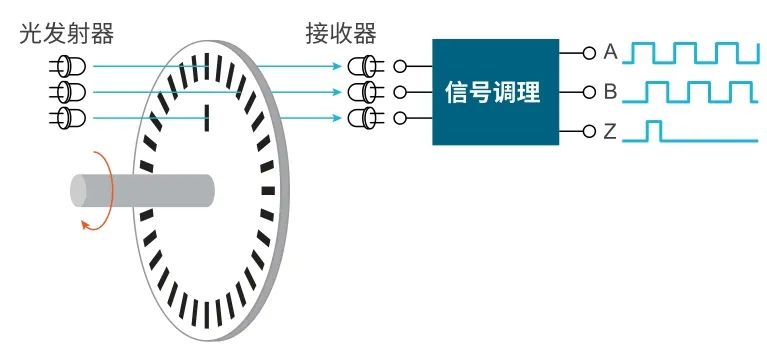
圖39. 正交編碼器的基本工作原理。
圓盤上的槽孔數量決定了PPR(每轉脈沖數)。LED發出的光線穿過圓盤上的槽孔,傳輸到光電晶體管并轉換為相位差為90°的脈沖信號。
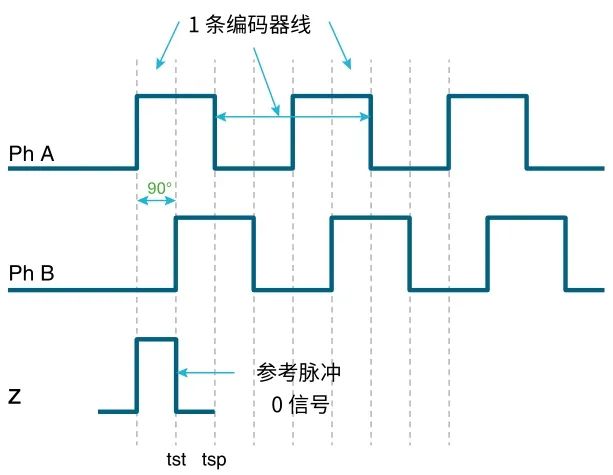
圖40. 正交編碼器接口的脈沖模式。脈沖信號的相位差為90°,因此A相的每個周期包含四個狀態:10、11、01和00。
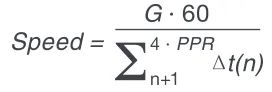
其中速度以RPM為單位,PPR是每機械轉動的脈沖數。Δtn是狀態轉換之間的差值,即在A相上出現一個邊沿,然后在B相上也出現一個邊沿。A相的每個脈沖周期有4次狀態轉換,因此每轉有4* PPR次狀態轉換。齒輪比(G)可用于調整速度,以適應加速(G>1)或減速(0
編碼器的增量角(或分辨率)為:

IMDA軟件計算出轉數,然后乘以增量角度,從而計算出旋轉角度。
旋轉變壓器
旋轉變壓器是一種安裝在電機上的傳感器,用于確定轉子的角度。由于其結構簡單可靠,因此廣泛應用于高溫、振動等惡劣條件。旋轉變壓器由以下部分構成:
?由高頻正弦輸入驅動的勵磁繞組
?兩個固定正交輸出繞組
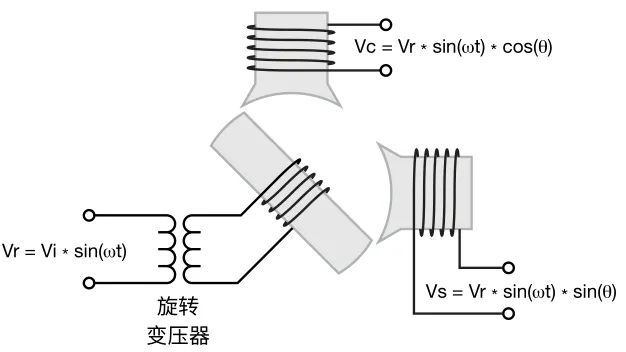
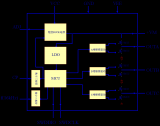
圖41:旋轉變壓器系統框圖,其中轉子中有一個勵磁繞組,并且兩個固定輸出繞組呈正交。
圖41為旋轉變壓器及其輸出信號的框圖。旋轉變壓器由一個稱為定子的固定部分和一個稱為轉子的旋轉部分組成,轉子安裝在電機軸上。
定子的初級繞組連接到高頻正弦信號。該勵磁信號通過變壓器作用耦合至轉子上的繞組。該轉子信號是圖 42所示的參考信號。
兩個次級定子繞組提供輸出信號。正弦繞組和余弦繞組呈90度角安裝。當電機旋轉時,轉子繞組的交變磁場會在正弦和余弦繞組中感應出調幅電壓。任何給定時間的信號幅度取決于轉子的角度。因此,正弦和余弦電壓的相對幅度可用于確定轉子的瞬時角度。
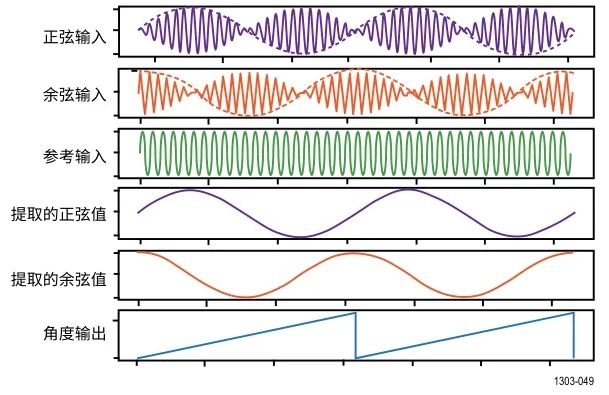
圖42. 旋轉變壓器的正弦、余弦和參考信號用于實時確定電機的轉子角度。
使用旋轉變壓器進行機械測量需要三種模擬輸入波形:正弦波、余弦波和參考波。參考信號是勵磁信號,而正弦和余弦信號是輸出繞組信號。正弦信號和余弦信號由參考信號調制。正弦和余弦包絡必須提取才能用于測量。正如預期的那樣,這兩個包絡之間的相位差為90度。
在任何給定時間點,電機旋轉角度的確定公式為:
電機角度 = Arctan(ASIN/ACOS)
其中ASIN和ACOS分別是正弦和余弦包絡的瞬時電壓。
電機速度通過測量正弦包絡信號的頻率來確定。例如,如果有兩個極對,則包絡的兩個周期代表一次旋轉。
速度 = 頻率(包絡信號)/ 極對數
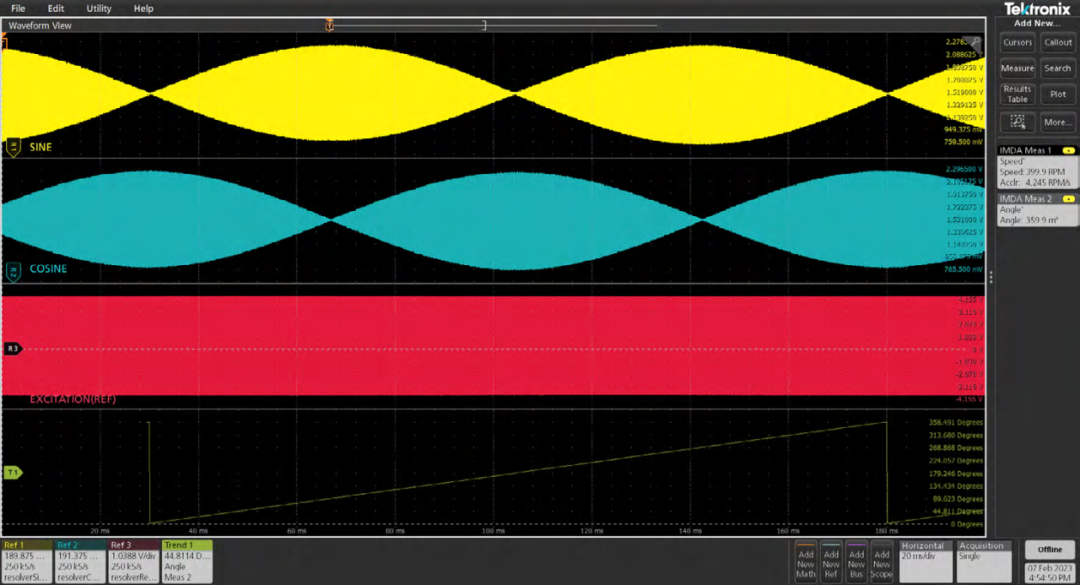
圖43. 使用旋轉變壓器傳感器信號進行機械測量。
扭矩測量
電機扭矩是電機在其輸出軸上產生的旋轉力,以牛頓米(Nm)、英尺磅(ft-lbs)、盎司力英寸(ozf)、英寸磅力(inch-lb)等為單位進行測量。5/6系列MSO上的IMDA軟件支持兩種扭矩測量方法。
傳感器法
這是最常見的扭矩測量方法,使用扭矩傳感器或測力傳感器輸出,如圖44所示。通過將旋轉扭矩傳感器與電機軸耦合,可以測量電機產生的扭矩。可以使用無源電壓探頭捕獲扭矩波形,電壓波形將與測得的扭矩值成正比。
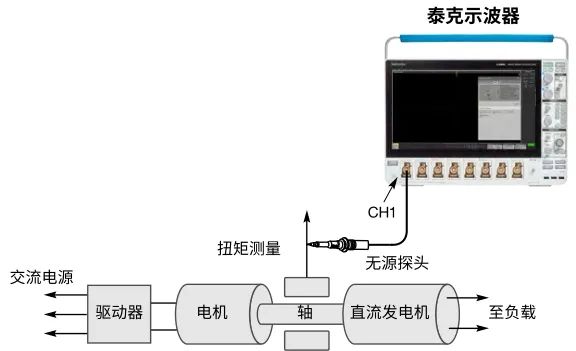
圖44. 用于使用IMDA軟件測量扭矩傳感器輸出的示波器連接
必須配置扭矩傳感器的高值和低值以及探頭輸出電壓的相應高值和低值。測量將把采集的電壓波形轉換為扭矩值。
測力傳感器將測量力。在這種情況下,扭矩的計算方法是將力與力臂長度(距離)相乘,從而將測得的力轉換為扭矩。
電流法
對于具有指定扭矩常數的電機,可以根據RMS電流推算出扭矩。這種方法提供的是扭矩估值。圖45顯示了使用“電流法”進行扭矩測量的連接設置。
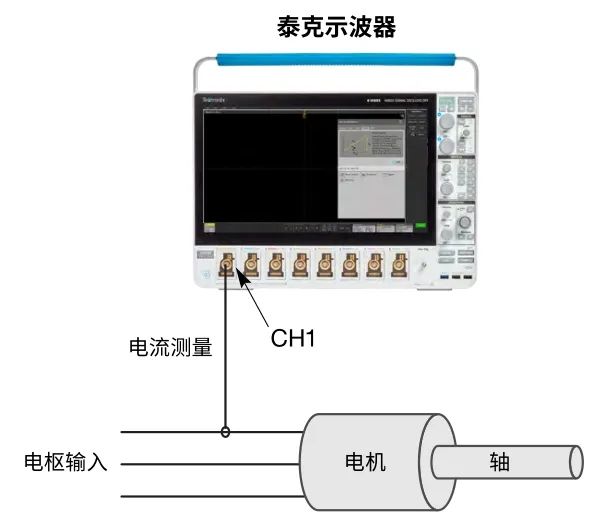
圖45. 對于具有指定扭矩常數的電機,可以使用電流來估算扭矩。
在這種情況下,電機產生的扭矩與單相或三相RMS電流成正比。比例因數用電機扭矩常數表示。
扭矩 = 扭矩常數 * IRMS
機械功率
電機輸出產生的機械功率是用測得的速度乘以扭矩值計算得出的。乘數是一個用于計算機械功率(單位為瓦特)的常數。速度單位為RPM。常數值取決于扭矩測量所使用的單位:如果是牛頓米,常數值則為 104.7252;如果是盎司英寸,則為0.739522;如果是英尺磅,則為141.9883;如果單位是英寸磅,則為11.83235897。
機械功率 = (扭矩 * 乘數) * 速度
系統效率
系統效率是電機驅動系統的總效率,也被稱為機電效率。系統效率表示有多少電能轉化為機械能。系統效率是電機的機械功率與用于為驅動器供電的三相電功率的比值。
系統效率 = 機械功率 / 電功率
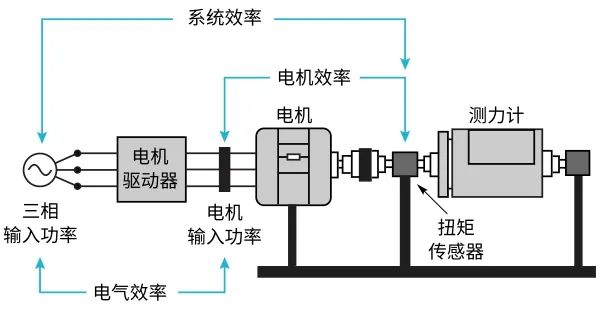
圖46. 可以對逆變器(電氣效率)、電機效率以及整個系統進行效率測量。
動態測量
電機驅動分析的一個常見要求是,能夠對電機隨時間而變的響應進行測量,以監控被測設備在加速和不同負載條件下的行為。這些動態測量將幫助您了解不同條件下電壓、電流、功率和頻率等參數之間的相互影響。IMDA軟件的電能質量測量組提供了兩種類型的趨勢圖用于此分析:
?時間趨勢圖
?采集趨勢圖
兩種趨勢圖各有其優點,可用于呈現電能質量測量組內支持的子測量。這些趨勢圖可以保存為CSV文件以供后期處理。
時間趨勢圖
時間趨勢圖顯示單次采集中每個波形周期的測量值。這種趨勢圖適用于觀察測量值在短時間內的具體變化,以及將這些變化與其他相關數據進行關聯分析。
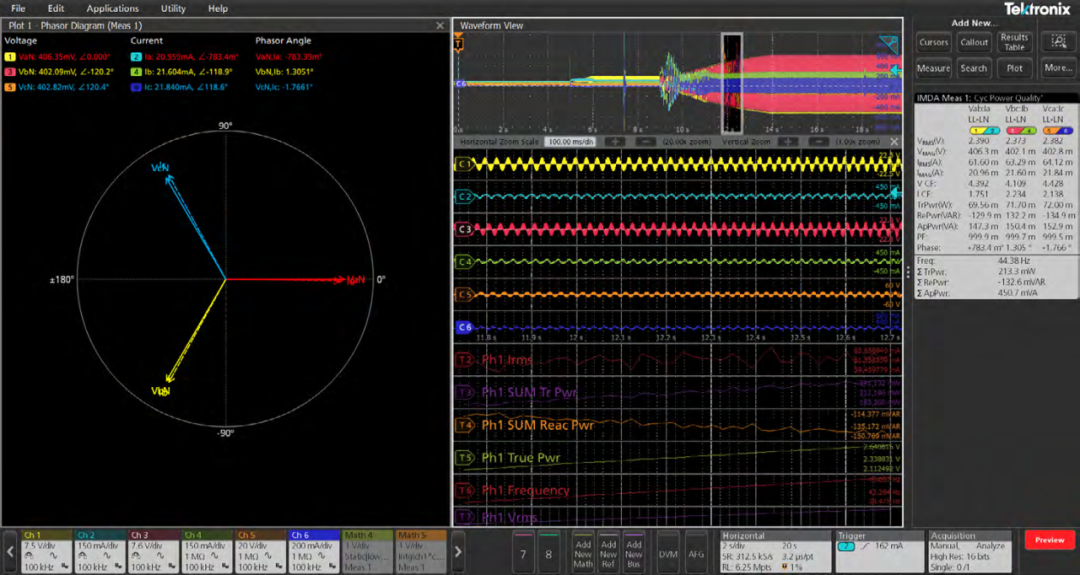
圖47. IMDA軟件中的時間趨勢圖用于記錄單次采集過程中測量值的變化。
采集趨勢圖
采集趨勢圖記錄每次采集的單次平均測量值,因此適用于長期分析。在測試配置期間,可以通過設置采集參數來指定測試持續時間。這些趨勢圖可以保存為CSV文件以供后期處理。如果將繪圖數據保存為CSV文件,時間值即可用。
動態負載控制對于三相感應電機和其他電機也很重要。通過采集趨勢圖可以查看加速、恒速和減速過程中的測量值。
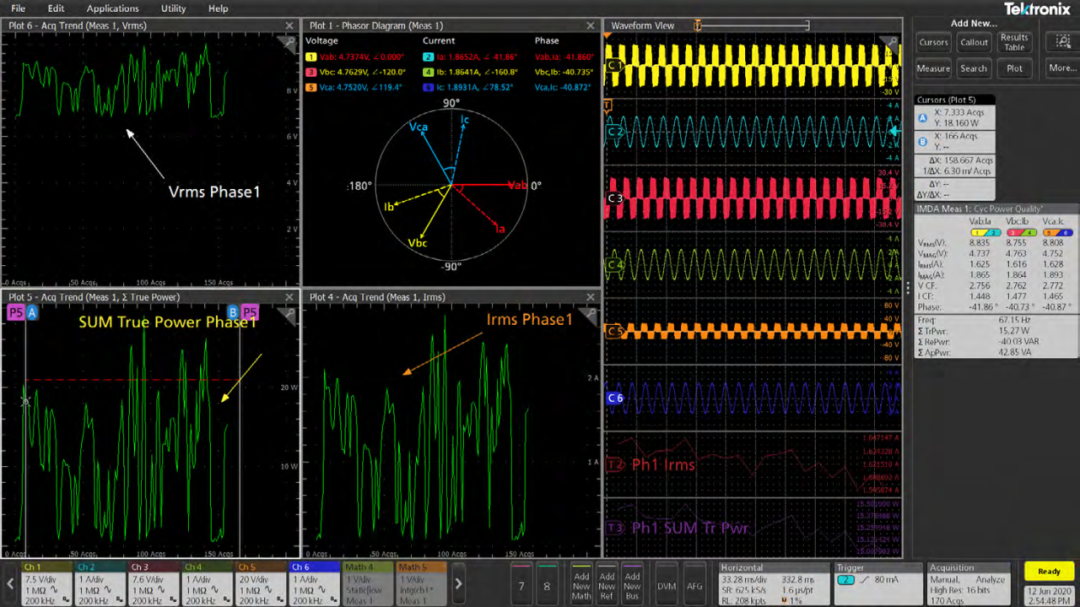
圖48. 采集趨勢圖記錄多次采集過程中測量值的變化。在上圖中以綠色線條表示。請注意,該圖還會顯示最近一次采集的波形和測量值。
總結
對三相電機驅動器進行測量面臨著諸多挑戰,因為必須進行連接,波形非常復雜且數學運算量巨大。泰克5/6系列MSO示波器的IMDA軟件大幅簡化了這些測量,為功率分析儀測量提供了高速采樣系統和實時示波器可視化的優勢。
利用示波器,三相電機驅動器設計人員可以在靜態和動態工作條件下進行分析,查看電氣和機械參數,從而詳細了解驅動器性能。5系列和6系列MSO的采樣和處理能力支持DQ0測量等功能,讓用戶能夠深入了解控制系統的內部情況。而功率分析儀目前還無法實現這些功能。
結語
通過本文的介紹,讀者可以全面了解如何使用示波器對三相電機驅動器進行深入的電氣和機械測量,并分析測量結果以優化系統性能。希望這兩篇文章能幫助您更好地掌握電機驅動器測量的核心技術,提升工作效率。
-
傳感器
+關注
關注
2561文章
52427瀏覽量
762879 -
驅動器
+關注
關注
54文章
8587瀏覽量
148846 -
泰克
+關注
關注
9文章
521瀏覽量
95135 -
逆變器
+關注
關注
293文章
4851瀏覽量
209845 -
三相電機
+關注
關注
13文章
297瀏覽量
21987
原文標題:使用示波器對三相電機驅動器進行測量(下)
文章出處:【微信號:泰克科技,微信公眾號:泰克科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

用于三相電機驅動的L6386 MOSFET功率驅動器評估板AN1315
三相BLDC電機驅動器混合IC
采用高性能微控制器的三相BLDC/PMSM電機驅動器參考設計

步進電機的驅動與控制 三相步進電機的驅動電路

泰克示波器如何測量時延?
MS39531——三相無感電機驅動器






 工商網監
工商網監

評論