
") 一文看透:人形機器人電機驅(qū)動產(chǎn)業(yè)鏈(附 60 款芯片方案)
一文看透:人形機器人電機驅(qū)動產(chǎn)業(yè)鏈(附 60 款芯片方案)

電子發(fā)燒友網(wǎng)報道(文 / 吳子鵬)根據(jù)國家市場監(jiān)管總局數(shù)據(jù),2024 年全國新注冊智能機器人相關(guān)企業(yè) 124,839 家,連續(xù)兩年超過 10 萬家。截至 2024 年年底,全國共有 45.17 萬家相關(guān)企業(yè)。自 2024 年下半年起,國內(nèi)人形機器人產(chǎn)業(yè)熱潮開啟,越來越多機器人公司將業(yè)務(wù)聚焦于人形機器人領(lǐng)域。數(shù)據(jù)顯示,截至 2024 年 11 月底,全國人形機器人相關(guān)企業(yè)數(shù)量達 6.7 萬家,其中整機企業(yè)超 80 家。較具代表性的企業(yè)有優(yōu)必選、宇樹科技(Unitree)、智元機器人、傅利葉智能和眾擎機器人等,這幾家代表公司的情況如下表所示。

從時間線來看,國內(nèi)人形機器人起步相對較晚,部分標志性成果的實現(xiàn)也晚于美國波士頓動力和特斯拉等公司。不過,從近期發(fā)展速度來看,國產(chǎn)人形機器人大有迎頭趕上之勢,這離不開背后產(chǎn)業(yè)鏈生態(tài)的支持。具體而言,人形機器人產(chǎn)品鏈主要涵蓋以下幾部分:上游的基礎(chǔ)組件和軟件,中游的整機制造,以及下游的應(yīng)用。
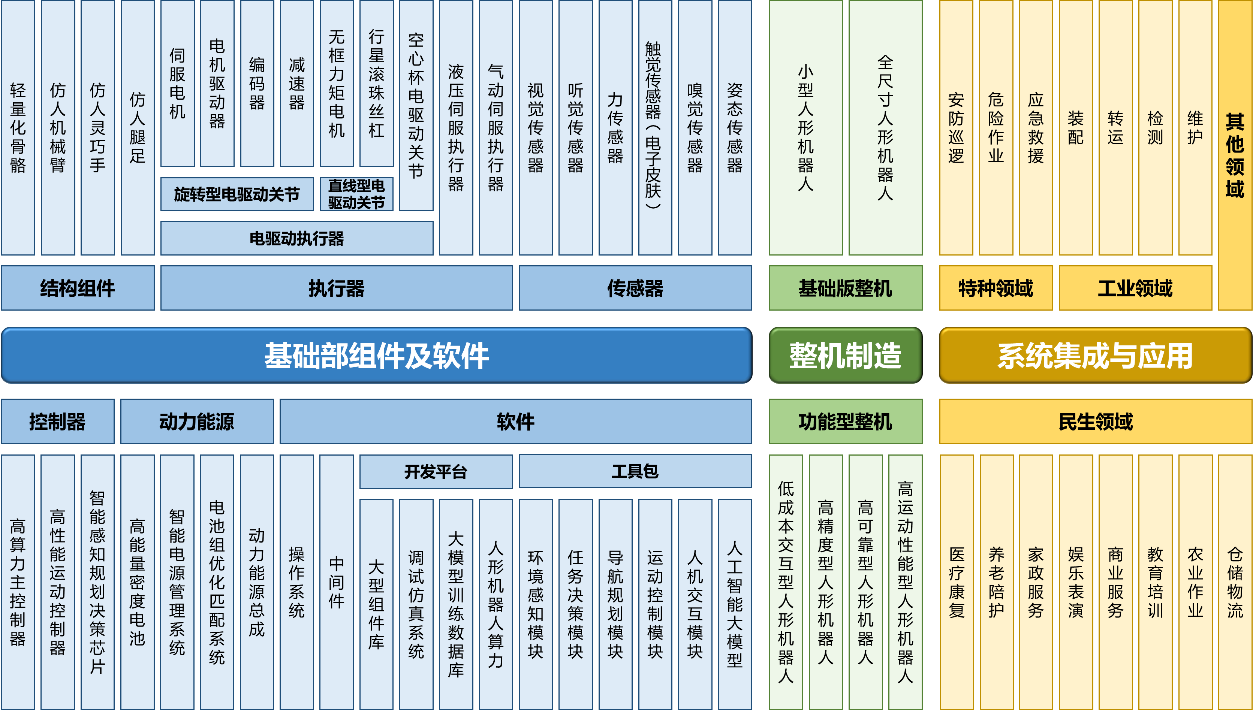
圖源:賽迪顧問《先進制造 2024》
目前,人形機器人已有眾多成熟應(yīng)用案例。例如,優(yōu)必選 Walker 系列人形機器人已在眾多工廠 “實習(xí)”,包括代工廠和汽車制造廠。另外,優(yōu)必選 Walker X 機器人能夠陪伴老人,輔助老人上廁所、協(xié)助吃飯,還可打掃房間、做飯等;樂聚 “夸父” 機器人能根據(jù)衣物種類材質(zhì)選擇洗滌程序、自動投放洗衣液柔順劑來洗衣,能智能感應(yīng)植物需求進行澆花插花,并且能自動識別衣物類型大小完成晾衣任務(wù)。
整機和應(yīng)用成果不斷涌現(xiàn),離不開上游硬件和軟件的持續(xù)進步。人形機器人上游的硬件可進一步細化為:精密減速器、伺服電機、絲杠、傳感器、電池、電子元器件,具體如下圖所示。
能夠看出,絲杠(19%)、伺服電機(16%)、減速器(13%)、傳感器(11%)是人形機器人中價值量占比較高的環(huán)節(jié),合計占比近 60%。此前我們在文章中梳理了人形機器人的 IMU 芯片供應(yīng),此次我們重點關(guān)注電機驅(qū)動環(huán)節(jié)。

人形機器人里的電機驅(qū)動系統(tǒng)
伺服電機是運動控制的核心部件,能將電信號轉(zhuǎn)化為精確的機械運動,為人形機器人的關(guān)節(jié)提供動力,使其實現(xiàn)各種靈活動作,具有高精度、高速度、高扭矩等特點。從電機類型來看,人形機器人所用到的電機包括傳統(tǒng)伺服電機(如直流伺服電機和交流伺服電機),以及特種伺服電機(如無框力矩電機和空心杯電機)。其中,傳統(tǒng)直流伺服電機包括永磁直流伺服電機、換流式伺服電機、永磁無刷直流伺服電機等,以精準控制和高響應(yīng)速度見長,適用于機器人關(guān)節(jié)驅(qū)動;交流伺服電機分為永磁型(高轉(zhuǎn)矩、高響應(yīng))和感應(yīng)型(高負載能力),支持高速、高精度控制,適配人形機器人四肢及軀干驅(qū)動,滿足機器人復(fù)雜運動需求;無框力矩電機結(jié)構(gòu)緊湊、功率密度高,適合用于人形機器人的關(guān)節(jié)部位,可直接集成到關(guān)節(jié)模塊中,減少空間占用,提高機器人的靈活性;空心杯電機具有體積小、重量輕、響應(yīng)速度快、效率高等優(yōu)點,常用于對空間和重量要求較高的小型人形機器人或機器人的小型關(guān)節(jié)。
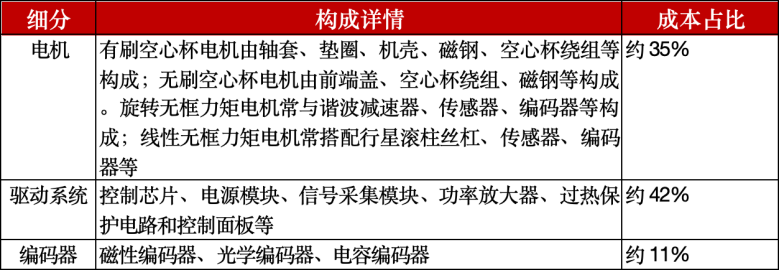
如下圖所示,人形機器人電機驅(qū)動系統(tǒng)的基本構(gòu)成大致分為三部分,包括電機本體、驅(qū)動系統(tǒng)和編碼器。其中,驅(qū)動系統(tǒng)主要包括控制芯片、電源模塊、信號采集模塊、功率放大器、過熱保護電路和控制面板等。
人形機器人的電機控制
作為控制系統(tǒng)核心,控制芯片負責(zé)數(shù)據(jù)采集、信號處理及指令下發(fā),,用于協(xié)調(diào)多關(guān)節(jié)協(xié)同運動。目前,專用于人形機器人電機控制的芯片并不多,大部分還是采用通用的 MCU 作為驅(qū)動芯片的主控芯片,區(qū)別在于集成度的高低。據(jù)統(tǒng)計,單臺機器人需 30 - 40 顆高端 32 位 MCU。在此,我們不再匯總通用 MCU,而是關(guān)注實時控制 MCU 以及人形機器人電機驅(qū)動專用芯片。國際廠商的實時控制 MCU 主要有以下幾款,分別是 TI C2000、ST STM32G4、瑞薩 RA8系列和英飛凌 PSOC 系列,它們的具體情況如下:

能夠看到,TI 公司的 C2000 系列和 ST 公司的 ST STM32G4 系列都直接面向伺服驅(qū)動和電機控制。
在這方面,國內(nèi)公司也取得了一些具體進展。例如,極海的 G32R501 系列 MCU,基于 Arm? Cortex? - M52 雙核架構(gòu),集成 Helium 技術(shù),具備高實時算力與靈活控制外設(shè),支持復(fù)雜算法的高速運算,適用于人形機器人關(guān)節(jié)控制器與靈巧手控制。
先楫半導(dǎo)體的HPM6E00系列?、HPM6E8Y系列?等,其中HPM6E8Y系列是該公司在2025年CES展會上發(fā)布的?最新一代機器人專用MCU?,專為關(guān)節(jié)控制與伺服電機優(yōu)化。HPM6E8Y系列內(nèi)置 RISC-V 雙核,主頻高達 600MHz,性能達到 3390CoreMark?的基準測試分數(shù),具備 1710DMIPS 的處理能力。同時,HPM6E8Y系列集成 2 個以太網(wǎng) PHY 收發(fā)器,支持 EtherCAT 從控制器,集成3個TSN千兆以太網(wǎng)端口和32通道高分辨率PWM輸出,支持毫秒級實時通信與精準運動控制,適用于緊湊型伺服驅(qū)動系統(tǒng)。?
兆易創(chuàng)新 GD32F4 系列 MCU 和 GD32E5 系列 MCU,前者采用 Cortex - M4 內(nèi)核,主頻達 240MHz,集成硬件 DSP 指令集和浮點運算單元(FPU),支持高精度電機控制算法(如 PID、FOC),適配工業(yè)機器人伺服電機驅(qū)動;后者搭載 Cortex - M33 內(nèi)核(180MHz),配備硬件三角函數(shù)加速器和高精度定時器,優(yōu)化電機控制閉環(huán)運算效率,有助于降低系統(tǒng)延遲。
除了這三家,納芯微的 NS800RT 系列實時控制 MCU 也值得關(guān)注,包括 NS800RT5039、NS800RT5049 和 NS800RT3025,分別采用單顆主頻為 260MHz 和 200MHz 的 Arm Cortex - M7 內(nèi)核,支持分支預(yù)測、DSP 指令集和 FPU。該系列產(chǎn)品可用于光伏 / 儲能逆變器、不間斷電源、工業(yè)自動化、協(xié)作機器人、新能源汽車大 / 小三電、空調(diào)壓縮機等系統(tǒng),納芯微工作人員此前也透露,人形機器人是該公司實時控制 MCU 重要的目標市場。
當(dāng)然,也有公司專門推出針對人形機器人電機驅(qū)動的芯片,比如芯朋微。該公司針對驅(qū)動無刷直流電機(BLDC)和微步進電機都推出了相關(guān)的專用芯片。其中,用于 BLDC 的專用芯片,能實現(xiàn)對電機的高效控制,具有高集成度、低功耗等特點,可精確控制電機的轉(zhuǎn)速、轉(zhuǎn)向和扭矩;用于微步進的專用芯片能夠?qū)崿F(xiàn)電機的微步細分控制,提高電機的定位精度和運行平穩(wěn)性。
人形機器人電機驅(qū)動里的功率器件
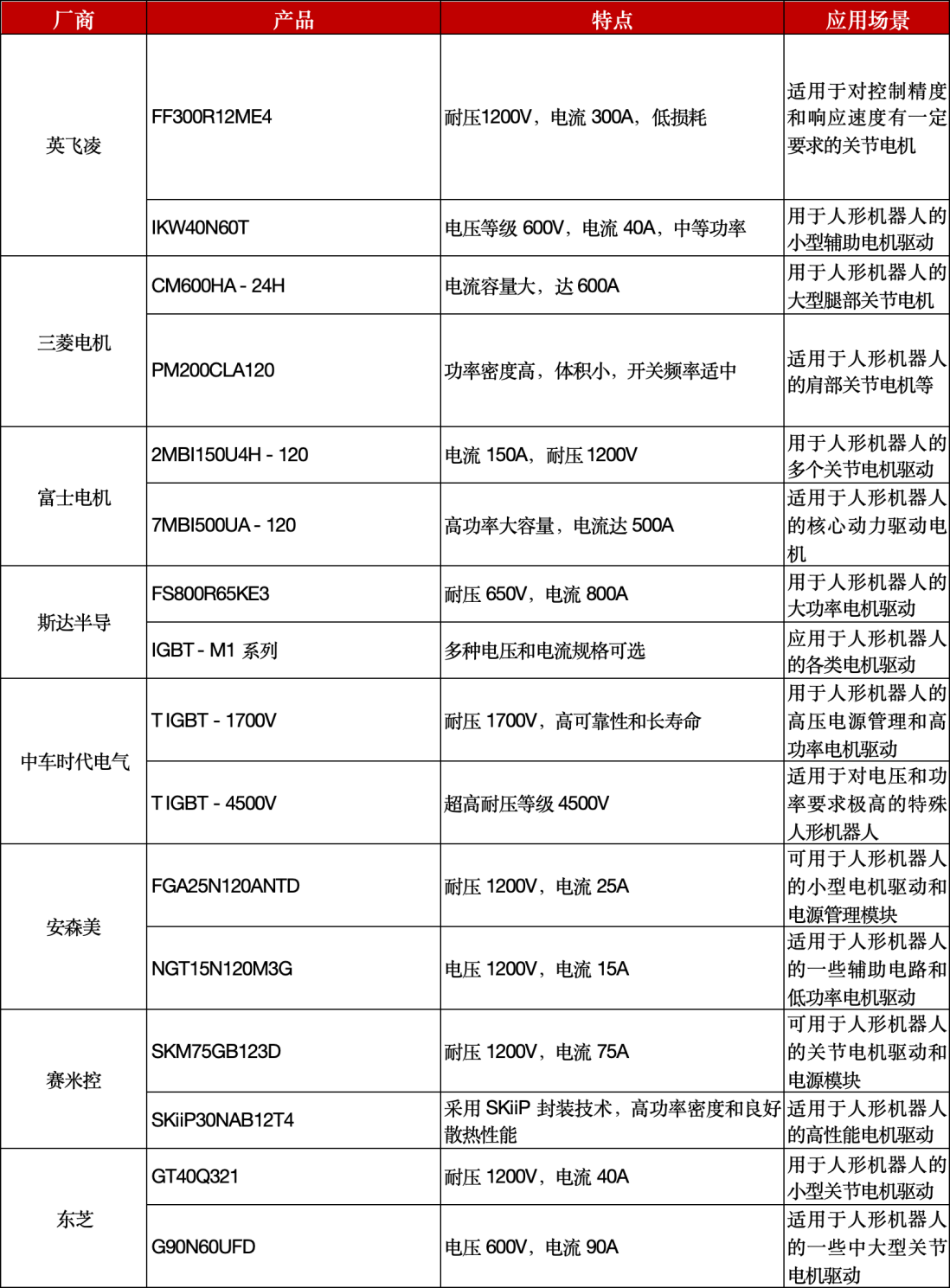
在電機驅(qū)動系統(tǒng)里,功率器件也至關(guān)重要。例如,相關(guān)統(tǒng)計數(shù)據(jù)顯示,在人形機器人中,每個機電執(zhí)行器一般需 1 - 2 顆 IGBT 芯片來驅(qū)動,能快速開關(guān),控制電機的功率輸出,實現(xiàn)電機的高效驅(qū)動。當(dāng)然,由于人形機器人最終用途的差異,廠商在選擇 IGBT 芯片時可能會在品質(zhì)上有所區(qū)分,比如工規(guī)級或者消費級,下面我們來看一些代表性的產(chǎn)品。
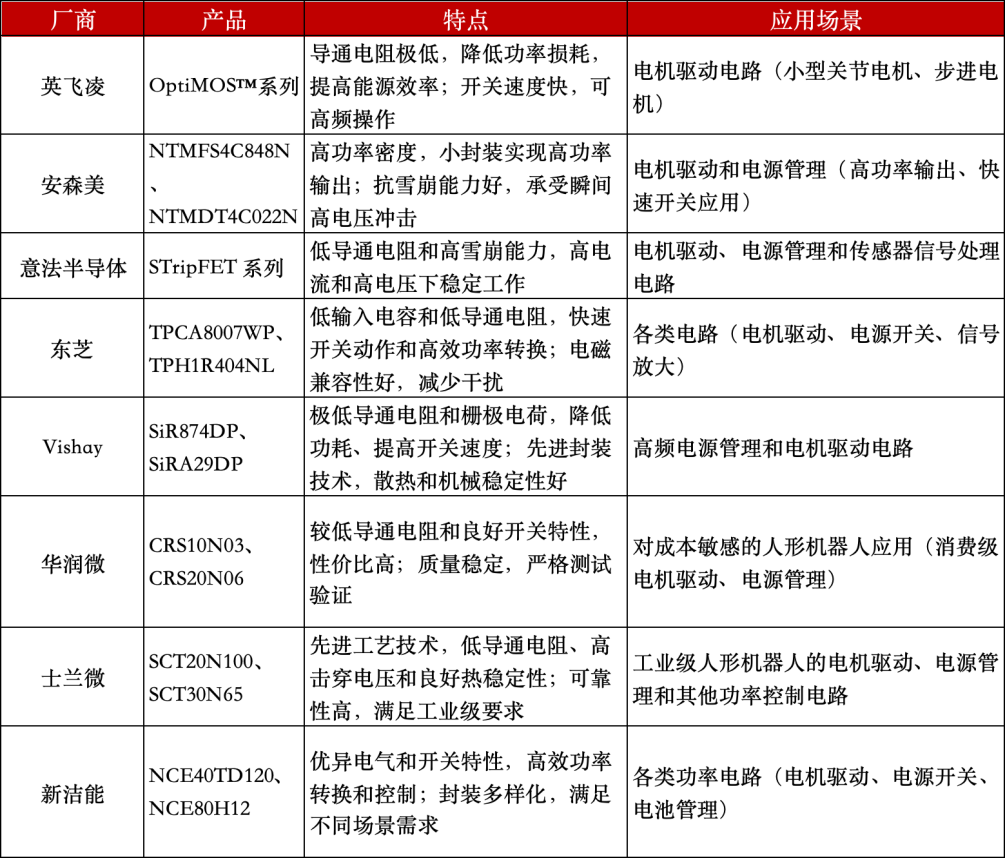
除了 IGBT,MOSFET 在人形機器人中的應(yīng)用范圍更為廣泛。MOSFET 高頻特性好、驅(qū)動功率小、導(dǎo)通電阻低,在小型關(guān)節(jié)電機和步進電機控制中有關(guān)鍵作用。例如,在小型關(guān)節(jié)電機里,MOSFET 可以組成 H 橋電路或半橋電路,通過控制電機的正反轉(zhuǎn)和轉(zhuǎn)速,實現(xiàn)這些小型關(guān)節(jié)的精細動作,如抓取物體、進行精細操作等。比較有代表性的產(chǎn)品包括:
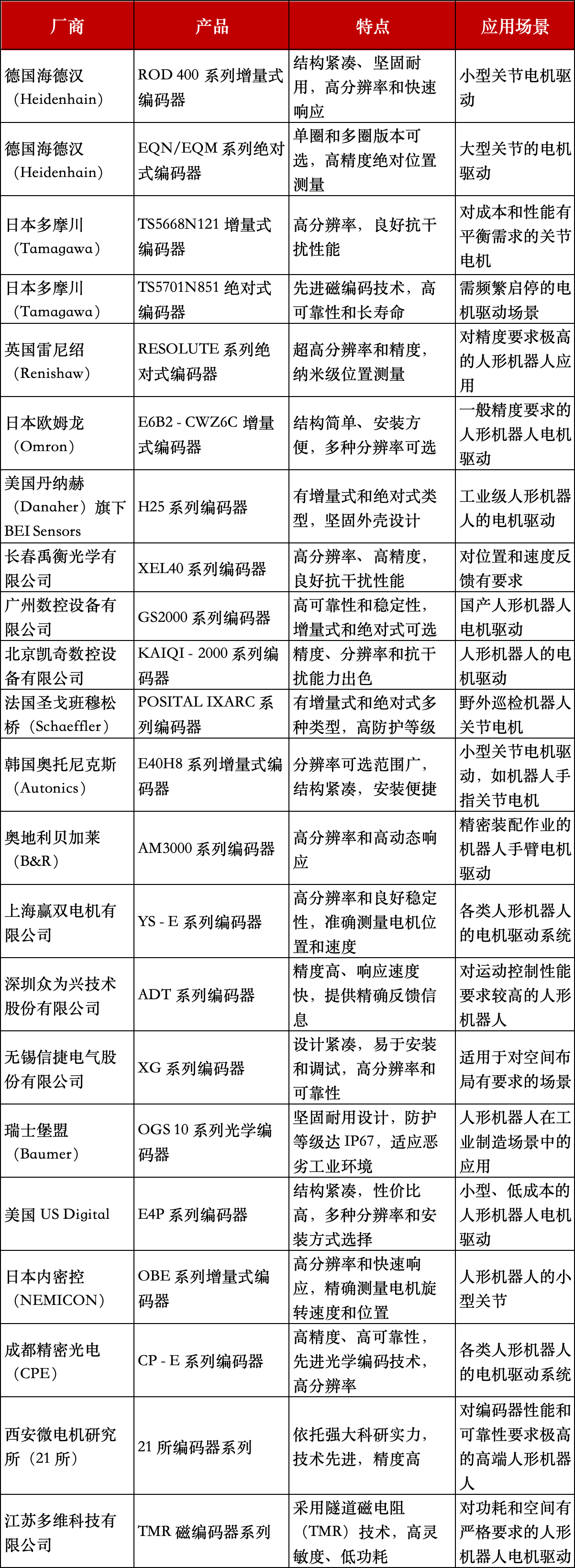
人形機器人電機驅(qū)動里的編碼器
最后看一下編碼器,在人形機器人電機驅(qū)動中,編碼器能夠為電機控制提供關(guān)鍵的反饋信息,從而實現(xiàn)精確的運動控制。具體而言,編碼器主要實現(xiàn)三大類功能:其一是位置反饋,編碼器可以實時監(jiān)測電機軸的位置,將位置信息反饋給電機控制器。控制器根據(jù)反饋的位置信息,調(diào)整電機的驅(qū)動信號,使電機準確地運行到目標位置,從而實現(xiàn)人形機器人各關(guān)節(jié)的精確定位和運動控制。
其二是速度反饋,通過測量編碼器輸出脈沖的頻率,可以計算出電機的轉(zhuǎn)速,電機控制器根據(jù)速度反饋信息,調(diào)節(jié)電機的驅(qū)動電流,使電機保持穩(wěn)定的轉(zhuǎn)速,確保人形機器人的運動平穩(wěn)、流暢。
其三是閉環(huán)控制,編碼器為人形機器人電機驅(qū)動系統(tǒng)提供了閉環(huán)控制所需的反饋信息,使系統(tǒng)能夠?qū)崟r調(diào)整控制策略,補償外界干擾和系統(tǒng)誤差,提高系統(tǒng)的控制精度和穩(wěn)定性。
目前,人形機器人領(lǐng)域一些常用的編碼器如下圖所示:
人形機器人電機驅(qū)動系統(tǒng)后續(xù)的發(fā)展趨勢
目前,人形機器人市場還處于發(fā)展早期,電機驅(qū)動的用量也無法與傳統(tǒng)汽車、工業(yè)市場相比。統(tǒng)計數(shù)據(jù)顯示,2024 年中國人形機器人電機驅(qū)動市場規(guī)模 0.54 億元,其中無框力矩電機規(guī)模 0.28 億元,空心杯電機規(guī)模 0.26 億元;預(yù)計 2025 年中國人形機器人電機驅(qū)動市場規(guī)模 1.18 億元,其中無框力矩電機規(guī)模 0.61 億元,空心杯電機規(guī)模 0.56 億元。不過,后續(xù)隨著人形機器人量產(chǎn)數(shù)量指數(shù)級提升,電機驅(qū)動產(chǎn)品也將從中受益。那么,后續(xù)應(yīng)用于人形機器人的電機驅(qū)動系統(tǒng)會有哪些發(fā)展趨勢呢?我們總結(jié)了以下幾點。
首先是更高的精度和響應(yīng)速度,隨著應(yīng)用場景對人形機器人動作精度要求的提高,電機控制需要達到更高的精度。如在一些需要精細操作的任務(wù)中,如抓取易碎物品、進行微創(chuàng)手術(shù)輔助等,要求電機能精確控制扭矩和位置。同時,為了使機器人能夠更自然流暢地運動,快速躲避障礙物或?qū)ν獠看碳ぷ龀隹焖俜磻?yīng),電機的響應(yīng)速度也將不斷提升,比如從接收到指令到開始動作的時間將縮短至毫秒級甚至更短。
其次是集成化與小型化,為了滿足人形機器人對空間和重量的嚴格要求,電機控制硬件將越來越集成化和小型化。將電機、驅(qū)動器、傳感器和控制器等集成在一起,形成高度集成的關(guān)節(jié)模塊,減少布線和連接部件,提高系統(tǒng)的可靠性和緊湊性。
第三是與 AI 深度融合,將人工智能算法,如深度學(xué)習(xí)、強化學(xué)習(xí)等融入電機控制中,使機器人能夠根據(jù)環(huán)境和任務(wù)的變化自主學(xué)習(xí)和優(yōu)化運動控制策略。例如,機器人在不同的地形行走或執(zhí)行不同的任務(wù)時,能通過學(xué)習(xí)不斷調(diào)整電機的控制參數(shù),以實現(xiàn)最佳的運動效果。
最后是多模態(tài)感知融合控制,結(jié)合視覺、力覺、觸覺等多種傳感器的信息,實現(xiàn)多模態(tài)感知融合控制。比如機器人在抓取物體時,不僅依靠視覺確定物體的位置和形狀,還通過力覺反饋精確控制電機施加的力,避免用力過度或不足。
下期我們將系統(tǒng)性地為大家盤點一些人形機器人在傳感器方面的應(yīng)用、產(chǎn)品和廠商情況。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
電機驅(qū)動
+關(guān)注
關(guān)注
60文章
1302瀏覽量
87687 -
BLDC
+關(guān)注
關(guān)注
213文章
830瀏覽量
98182 -
人形機器人
+關(guān)注
關(guān)注
7文章
714瀏覽量
17563
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
人形機器人關(guān)節(jié)模組關(guān)鍵技術(shù)解析,及產(chǎn)業(yè)鏈上游電機/傳感器企業(yè)一覽
置,用來控制機器人模仿人類頭部、手臂、腿部等的旋轉(zhuǎn)、俯仰、彎曲、伸展、擺動等動作。 ? 人形機器人關(guān)節(jié)模組主要有旋轉(zhuǎn)關(guān)節(jié)模組和線性關(guān)節(jié)模組,旋轉(zhuǎn)關(guān)節(jié)模組又主要由伺服驅(qū)動、力矩

ADI人形機器人的“感覺神經(jīng) + 電力神經(jīng)元”核心芯片方案盤點
以下是關(guān)于 ADI(Analog Devices Inc.)在人形機器人領(lǐng)域的芯片方案解讀與型號分析 ,聚焦其核心優(yōu)勢、關(guān)鍵產(chǎn)品系列、適用模塊和生態(tài)布局:
讓人形機器人像人一樣去感知,這家國產(chǎn)芯片公司選擇從信號鏈入手
能力。 ? 在電子發(fā)燒友網(wǎng)《人形機器人的電機控制和傳感器》專題中,芯海科技模擬信號鏈產(chǎn)品線總經(jīng)理李曉在接受電子發(fā)燒友網(wǎng)采訪時指出,人形

一文讀懂德州儀器的人形機器人電機驅(qū)動和傳感布局
電子發(fā)燒友網(wǎng)報道(文/吳子鵬)隨著 AI 大模型、電機驅(qū)動和多模態(tài)傳感等核心技術(shù)不斷取得突破,人形機器人正處于技術(shù)突破與規(guī)模量產(chǎn)的臨界點,展

通關(guān)人形機器人控制鏈,這家國產(chǎn)RISC-V芯片公司做到了
電子發(fā)燒友網(wǎng)報道(文/吳子鵬)近來,人形機器人產(chǎn)業(yè)爆火,引發(fā)廣泛關(guān)注。從系統(tǒng)構(gòu)成來看,人形機器人

人形機器人深度解析
人形機器人供應(yīng)鏈來看,靈巧手、絲杠、減速器、傳感器、電機、控制器等都是值得重點關(guān)注的高價值環(huán)節(jié),本文將對各大核細分環(huán)節(jié)進行逐一拆解。
中國在人形機器人產(chǎn)業(yè)鏈中占據(jù)主導(dǎo)地位
%的企業(yè)位于亞洲,彰顯出亞洲在人形機器人產(chǎn)業(yè)鏈中的重要地位。 其中,中國更是表現(xiàn)突出,占據(jù)了這些公司中的56%比例,成為人形機器人領(lǐng)域的重要
伺服電動缸在人形機器人中的應(yīng)用
將伺服電機自身優(yōu)勢轉(zhuǎn)變成精確速度控制、精確位置控制和精確推力控制,從而實現(xiàn)高精度直線運動。這種特性使其成為人形機器人的核心運動部件,特別是在關(guān)節(jié)驅(qū)動方面。二、替代傳統(tǒng)
發(fā)表于 02-06 09:04
洞察:人形機器人傳感器產(chǎn)業(yè)鏈概覽
內(nèi)部與性能相關(guān)的力感知能力和與外部交互相關(guān)的觸覺、視覺、聽覺能力都極為關(guān)鍵,直接影響機器人可使用的范圍。機器人各精密加工零部件國內(nèi)產(chǎn)業(yè)鏈逐步走向成熟,傳感器有望成為下一國產(chǎn)替代重點。

人形機器人全景產(chǎn)業(yè)鏈大梳理!
特斯拉人形機器人進入量產(chǎn)前夕,有望給全球機器人市場帶來“鯰魚效應(yīng)”。近期,特斯拉CEO馬斯克公布了最新的人形機器人Optimus的產(chǎn)量規(guī)劃。

人形機器人趨勢論道:融合性人才、產(chǎn)業(yè)鏈集群、零部件小型化等備受關(guān)注
電子發(fā)燒友網(wǎng)報道(文/黃晶晶)在日前舉行的高工人形機器人年會上,高工機器人產(chǎn)業(yè)研究所(GGII)重磅發(fā)布《

《人形機器人產(chǎn)業(yè)地圖(2024)》重磅發(fā)布!
在11月29日舉辦的2024高工人形機器人年會上,高工機器人產(chǎn)業(yè)研究所(GGII)重磅發(fā)布《人形機器人
發(fā)表于 12-02 09:17
?2420次閱讀

人形機器人帶動無框力矩電機需求,廠商積極布局
電子發(fā)燒友網(wǎng)報道(文/吳子鵬)近一段時間以來,人形機器人成為產(chǎn)業(yè)的熱門話題。工業(yè)和信息化部原副部長、中國電子學(xué)會理事長徐曉蘭此前表示:“在企
2026年:人形機器人產(chǎn)業(yè)規(guī)模預(yù)計超200億元大關(guān)
隨著人形機器人技術(shù)的持續(xù)飛躍,其在產(chǎn)業(yè)界的應(yīng)用前景正被廣泛看好,各地正積極推動其在工業(yè)制造、醫(yī)療健康、服務(wù)業(yè)等多個領(lǐng)域的落地應(yīng)用,旨在加速推動產(chǎn)業(yè)的轉(zhuǎn)型升級。賽迪研究院指出,得益于政府





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論