

近年來,端到端自動駕駛成為研究熱點,其核心在于從傳感器數據直接學習駕駛決策。然而,駕駛行為本質上是多模態的——同一場景下可能存在多種合理軌跡,例如在復雜路口,車輛可選擇左轉、右轉或直行。這種多樣性是提升自動駕駛魯棒性和安全性的關鍵,但現有方法往往受限于單一軌跡回歸或固定錨點采樣,難以全面建模駕駛決策空間。
擴散模型 (Diffusion Model) 憑借強大的多模態建模能力,已在機器人決策學習中得到驗證。其逐步去噪機制能從復雜數據分布中生成多樣性強、符合物理約束的軌跡,使其成為自動駕駛多模態規劃的理想選擇。然而,擴散模型直接應用于端到端自動駕駛仍面臨計算開銷高和模式崩潰 (Mode Collapse) 的問題——傳統擴散模型需多輪迭代去噪,導致推理速度難以滿足實時需求,同時在高度動態的交通場景下,生成軌跡往往趨于重疊,無法充分展現駕駛決策的多樣性。
為此,我們提出截斷擴散策略 (Truncated Diffusion Policy) ,結合多模態錨點先驗 (Multi-mode Anchors Prior) ,通過截斷擴散過程,使模型從錨定的高斯分布 (Anchored Gaussian Distribution) 直接去噪至多模態駕駛軌跡分布。該方法避免了從純隨機噪聲開始的冗長迭代,僅需2步即可完成高質量軌跡推理,相比傳統擴散策略加速10倍。此外,我們設計了級聯擴散解碼器 (Cascade Diffusion Decoder) ,增強模型對場景信息的交互能力,提升軌跡預測精度。
我們提出的DiffusionDrive首次在端到端自動駕駛中引入擴散模型,并通過截斷擴散策略與級聯擴散解碼器,有效解決計算開銷與模式崩潰問題,為構建高效、魯棒的多模態自動駕駛規劃提供了新思路。
范式對比
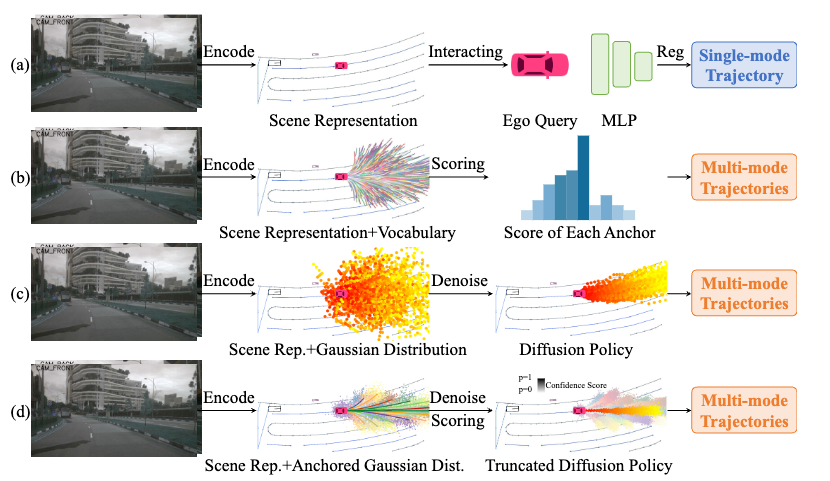
對比不同的端到端自動駕駛范式:
(a) 單模態回歸方法,通過Ego Query機制直接預測單一軌跡,但忽略了駕駛行為的多模態特性,難以適應復雜交通場景。
(b) 預定義錨定軌跡采樣方法,通過固定的錨定軌跡集來離散化軌跡空間,并基于評分機制進行選擇,雖然能夠一定程度上捕捉多模態行為,但受限于錨定軌跡數量和分布,難以泛化到未見場景。
(c) 傳統擴散策略通過在高斯分布上迭代去噪來生成軌跡,能夠捕捉多模態駕駛行為,但由于去噪步驟多,計算成本高,并且在復雜交通環境中容易出現模式崩潰,導致軌跡多樣性不足。
(d) 我們提出的截斷擴散策略,通過引入錨定高斯分布,利用多模態錨點作為初始分布,使模型從更合理的軌跡分布開始去噪,從而顯著減少計算開銷,僅需少量去噪步驟即可生成高質量的多模態軌跡,在保證多樣性的同時大幅提升推理效率,使其更適用于實時自動駕駛。
截斷擴散策略
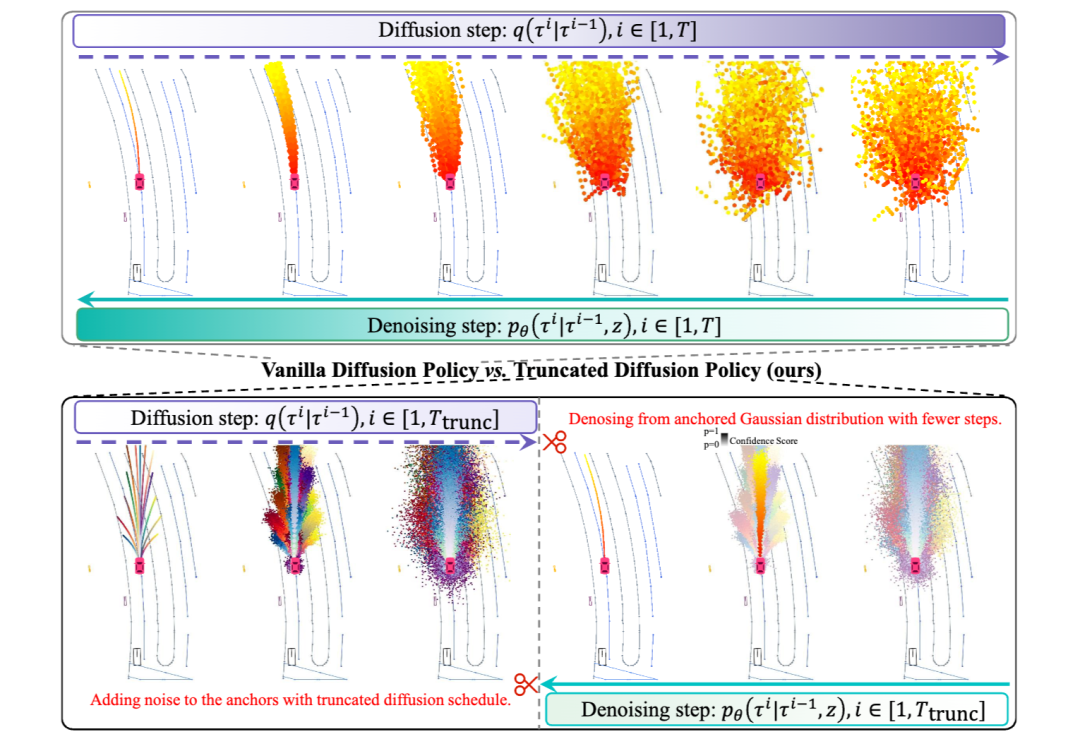
傳統擴散策略在端到端自動駕駛任務中的應用面臨兩大核心挑戰:高計算成本和模式崩潰。擴散模型的去噪過程通常需要多輪迭代,例如20輪,以逐步將純高斯噪聲轉化為可行的駕駛軌跡。然而,這種逐步推理方式導致計算開銷極高,難以滿足實時自動駕駛的要求。此外,由于自動駕駛場景高度動態且充滿不確定性,擴散模型從隨機噪聲生成軌跡時,可能會產生高度相似、甚至完全重疊的軌跡分布,導致模式崩潰,使得生成的軌跡多樣性不足,難以覆蓋真實世界中的駕駛決策空間。
為了解決這些問題,我們提出截斷擴散策略,通過結合多模態錨點先驗,優化擴散模型的初始化和去噪過程,使其能夠從更合理的軌跡分布出發,而非從完全隨機的高斯噪聲開始。具體而言,我們首先在訓練數據中對駕駛軌跡進行聚類,得到一組代表性的錨點軌跡 (Anchor Trajectories) ,這些錨點能夠較好地覆蓋不同駕駛場景下的典型軌跡模式。在訓練時,我們不再讓模型從純隨機高斯分布中學習去噪,而是在錨點軌跡的基礎上添加少量噪聲,形成一個更具物理合理性的初始分布。相比于傳統擴散模型直接從隨機噪聲學習駕駛行為,這種方式大幅減少了去噪步驟的需求,讓模型可以從更接近真實駕駛行為的軌跡分布中進行優化。
在推理階段,我們直接從這些錨定的軌跡分布中采樣,而不是從完全隨機的高斯噪聲開始,并大幅縮短去噪過程,僅需2輪去噪步驟即可生成高質量的駕駛軌跡,相比傳統擴散策略加速10倍。此外,為了進一步提升軌跡的合理性,我們在去噪過程中引入了置信度評分機制 (Confidence Scoring Mechanism) ,通過對去噪后的軌跡進行動態評分,篩選出最符合物理約束和場景要求的軌跡。這種評分機制可以有效過濾掉異常或重疊的軌跡,避免模式崩潰問題,使最終生成的軌跡既具備多樣性,又保持合理性。
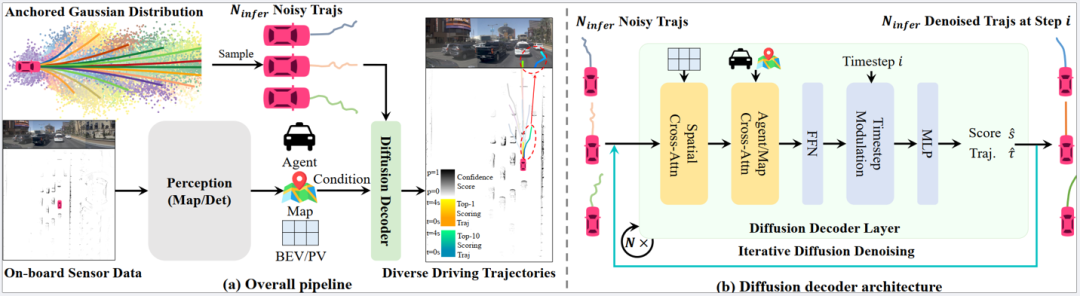
此外,我們設計了一種級聯擴散解碼器,提升模型在去噪過程中的場景感知能力。傳統擴散模型通常采用單步解碼,即直接在每一步去噪后輸出軌跡,而我們的級聯擴散解碼器允許模型在每個去噪步驟中與環境感知信息進行多輪交互,通過層層遞進的方式優化軌跡質量。這種級聯機制結合了稀疏可變形注意力 (Sparse Deformable Attention) ,使得模型能夠高效地從鳥瞰視角 (BEV) 和透視視角 (PV) 提取關鍵信息,提升軌跡生成的穩定性和魯棒性。
綜上,我們的截斷擴散策略不僅保留了擴散模型在多模態軌跡建模上的強大能力,還通過錨點先驗和去噪優化,顯著提升了推理效率,并通過置信度評分和級聯解碼器,有效解決了模式崩潰問題,最終使得生成的駕駛軌跡更加貼近真實駕駛行為,使其更適用于實時自動駕駛系統。
實驗驗證
我們選擇采用更加嚴格的閉環評測方式,針對駕駛決策的數據集NAVSIM,來驗證我們的設計:
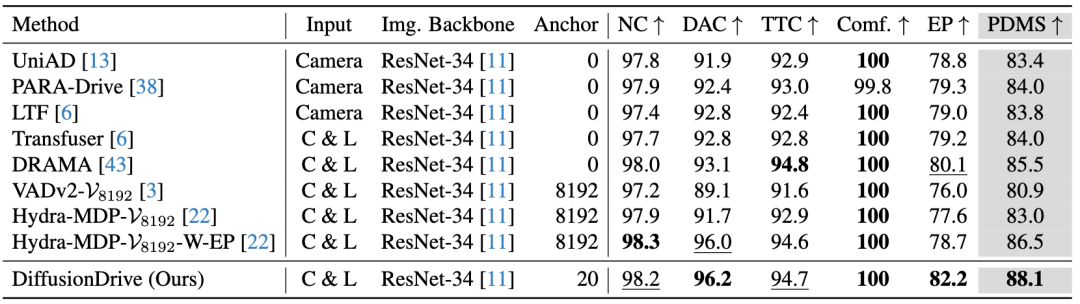
可以看到DiffusionDrive大幅領先之前所有的端到端方案,僅僅通過學習人類駕駛行為,不引入額外監督與后處理,我們超過了之前的冠軍方案Hydra-MDP。
EP指標的明顯優勢更是凸顯了DiffusionDrive方法的魯棒性。因為EP指標用于評測planning的完成度以及對干擾的魯棒性,而DiffusionDrive在這一指標上具有十分突出的優勢。

在消融實驗中,顯示我們提出的截斷式擴散策略和設計的Diffusion Decoder相比于傳統擴散策略能夠帶來更高的planning質量 (PDMS) ,更高的planning多模態特性 (D) ,更快的速度 (FPS) 。
可視化驗證
我們將模型在驗證集上推理得到的多模態軌跡可視化出來:
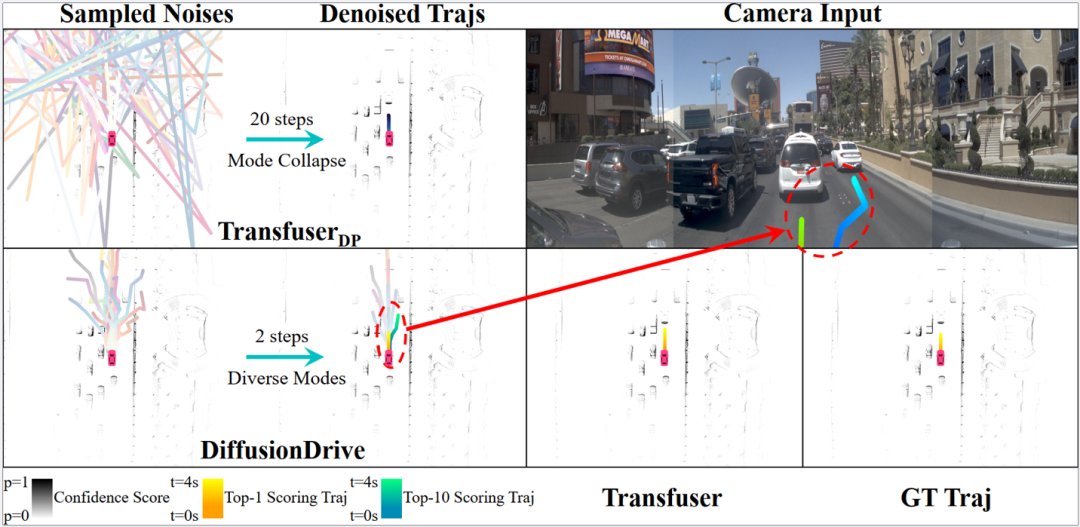
如上圖所示,我們不僅能夠輸出保守的跟車,也能夠輸出合理換道超車的行為。
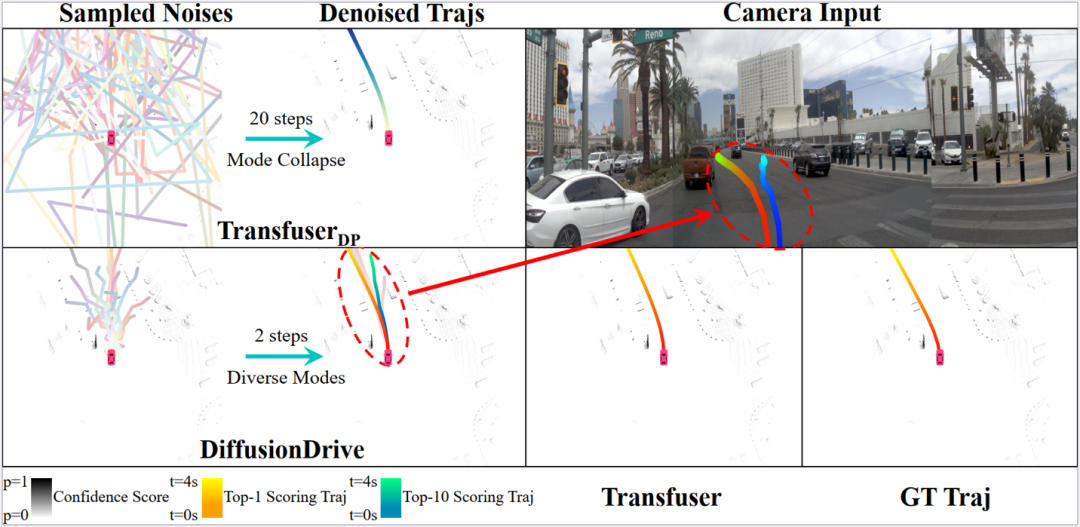
上圖也是進一步驗證DiffusionDrive魯棒的多模態特性,輸出多樣化的planning軌跡能夠進一步與環境交互,避免碰撞。
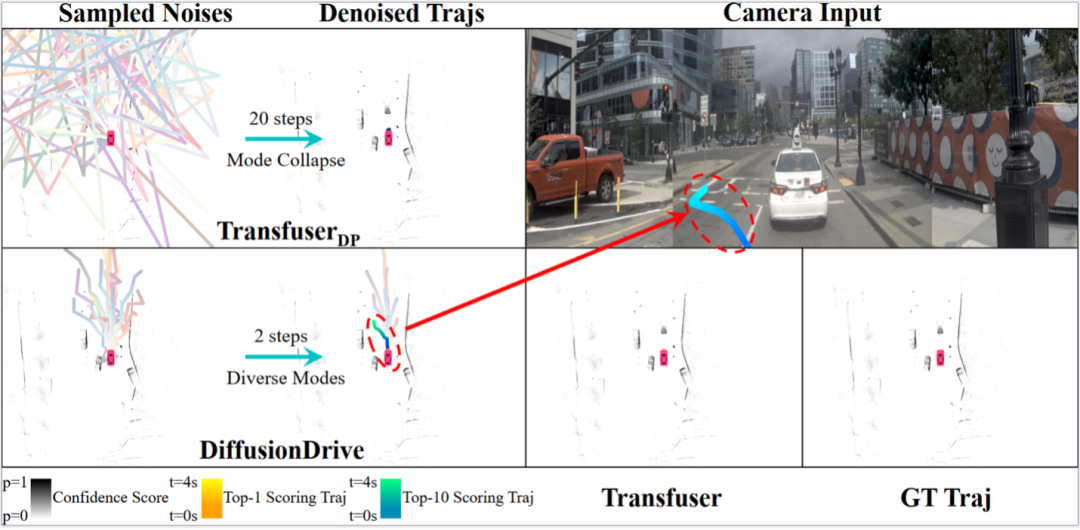
上圖顯示DiffusionDrive還能和紅綠燈交互,所以在除了跟車行為之外的換道行為時,選擇停在停止線上,而模型在訓練中并沒有紅綠燈的標注,通過提出的范式,使得模型學習到了潛在的駕駛底層邏輯。
業務驗證
DiffusionDrive也在業務數據集上進行了規模化驗證。下面是實車測試的視頻:
總結
我們提出DiffusionDrive,一種基于擴散模型的端到端自動駕駛方法,以截斷擴散策略解決傳統擴散方法的高計算成本和模式崩潰問題。通過引入多模態錨點先驗,我們將去噪過程從錨定的高斯分布開始,而非從純隨機噪聲進行迭代,大幅減少計算量,僅需2步即可生成高質量軌跡,相較于傳統擴散策略推理加速10倍。此外,我們設計了級聯擴散解碼器,結合場景感知信息逐步優化軌跡,提升軌跡預測的多樣性和準確性。
實驗表明,DiffusionDrive在NAVSIM和nuScenes數據集上均取得最優表現,顯著提升了規劃質量、軌跡多樣性和計算效率。相比現有SOTA方法,DiffusionDrive在保證實時性的同時,提高了20.8%軌跡精度,降低63.6%碰撞率。此外,我們更是在真實場景中驗證了DiffusionDrive的有效性。
本研究首次將截斷擴散策略引入端到端自動駕駛,突破了擴散模型計算開銷大、模式崩潰的瓶頸,為實時高效的多模態駕駛決策提供了一種全新范式。
-
解碼器
+關注
關注
9文章
1163瀏覽量
41662 -
機器人
+關注
關注
212文章
29421瀏覽量
211335 -
模型
+關注
關注
1文章
3479瀏覽量
49934 -
自動駕駛
+關注
關注
788文章
14176瀏覽量
169278
原文標題:CVPR 2025|DiffusionDrive: 邁向生成式多模態端到端自動駕駛
文章出處:【微信號:horizonrobotics,微信公眾號:地平線HorizonRobotics】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

FPGA在自動駕駛領域有哪些應用?
自動駕駛真的會來嗎?
端到端自動駕駛到底是什么?


理想汽車加速自動駕駛布局,成立“端到端”實體組織

Mobileye端到端自動駕駛解決方案的深度解析









 工商網監
工商網監

評論