") 如何用加速度計(jì)提高傾角測(cè)量精度(含詳細(xì)計(jì)算過(guò)程)
如何用加速度計(jì)提高傾角測(cè)量精度(含詳細(xì)計(jì)算過(guò)程)
傾角測(cè)量的典型應(yīng)用
本文旨在探討如何用組合器件一類(lèi)的加速度計(jì)提高傾角測(cè)量的精度。在乘用車(chē)上,電動(dòng)駐車(chē)制動(dòng)器(EPB)被用于使汽車(chē)在平坦的分級(jí)道路上保持靜止。這是通過(guò)用一個(gè)單軸或雙軸加速度計(jì)測(cè)量?jī)A角來(lái)實(shí)現(xiàn)的。一般做法是將一個(gè)X軸/Y軸或Z軸低g加速度計(jì)裝在EPB控制單元中一個(gè)專(zhuān)門(mén)的模塊中。現(xiàn)在,越來(lái)越多的汽車(chē)配有ESC(電子穩(wěn)定控制)功能,在單個(gè)芯片中集成了組合式低g加速度計(jì)和陀螺儀。這樣做是為了防止汽車(chē)側(cè)滑和翻車(chē);如今,ESC功能已經(jīng)成為世界各國(guó)或地區(qū)法律的強(qiáng)制要求。如果通過(guò)組合器件(單芯片、組合式加速度計(jì)和陀螺儀)實(shí)現(xiàn)傾角測(cè)量,則不必在車(chē)上安裝一個(gè)獨(dú)立的EPB模塊,結(jié)果可以大幅降低汽車(chē)的成本。由于組合器件通常用于ESC,所以并未針對(duì)傾角檢測(cè)優(yōu)化,并且通過(guò)組合器件測(cè)量?jī)A角時(shí),測(cè)量精度有時(shí)無(wú)法達(dá)到要求。由于組合器件是XY軸或XYZ軸,所以通常用X軸進(jìn)行傾角測(cè)量,EPB模塊中的部分傳統(tǒng)型低-g加速度計(jì)使用的是Z軸,因?yàn)樗谴怪卑惭b在發(fā)動(dòng)機(jī)艙里的。檢測(cè)軸應(yīng)該與重力垂直,才能取得更高的精度——我們稍后會(huì)討論這一點(diǎn)。
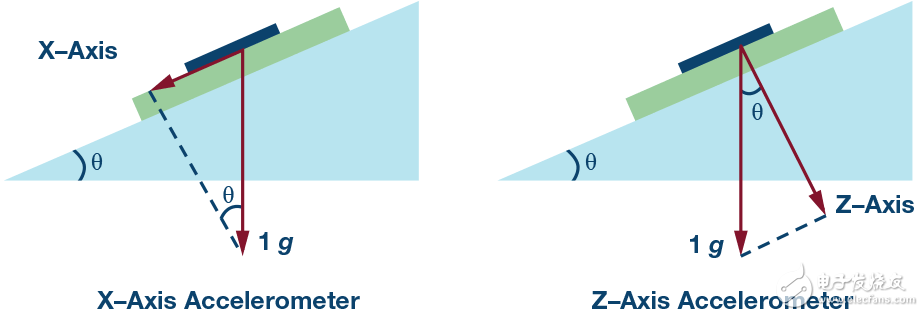
圖1. X軸和Z軸加速度計(jì)的安裝示意圖。
對(duì)于汽車(chē)中的傾角測(cè)量,評(píng)估精度是非常重要的。不妨想像,您的車(chē)停在絕對(duì)平坦的地面,因此,加速度計(jì)計(jì)算的傾角應(yīng)該是0°。如果您的車(chē)停在斜坡上,就應(yīng)該精確地檢測(cè)出傾角,以便正確地激活剎車(chē)系統(tǒng)。
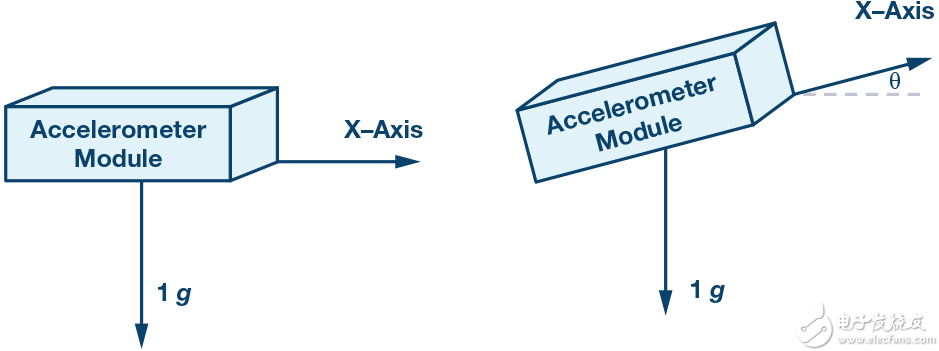 圖2. X軸檢測(cè)傾角測(cè)量示意圖。
圖2. X軸檢測(cè)傾角測(cè)量示意圖。
因此

其中:
AOUT為加速度計(jì)的輸出,單位為g。
θ 為斜坡的傾角,單位為度。
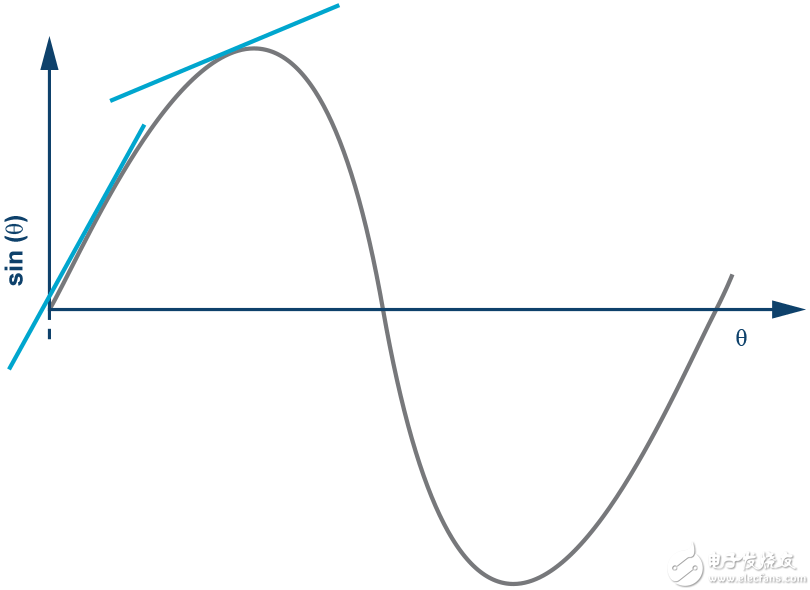 圖3. sin θ對(duì)θ隨θ增大而下降的靈敏度。
圖3. sin θ對(duì)θ隨θ增大而下降的靈敏度。
由于sin θ是一個(gè)非線性函數(shù),所以,AOUT與θ之間的關(guān)系是非線性 的,在接近零時(shí)其線性度處于最佳狀態(tài),即其此時(shí)具有最佳的測(cè)量精度。隨著θ的增大,測(cè)量精度下降。這正是檢測(cè)軸應(yīng)與重力垂直的原因,因?yàn)榈缆菲露葘⒔咏?/span>
對(duì)于汽車(chē)傾角測(cè)量,不必在全斜坡坡度的條件下考慮系統(tǒng)。現(xiàn)實(shí)世界中,道路上的絕大多數(shù)斜坡坡度不會(huì)超過(guò)30°。我們只需要分析在±30°的范圍內(nèi)分析貢獻(xiàn)因素的精度即可。
影響系統(tǒng)級(jí)測(cè)量精度的貢獻(xiàn)因素有多個(gè):
靈敏度誤差和初始絕對(duì)失調(diào)
非線性度
與初始絕對(duì)失調(diào)的總失調(diào)變化
噪聲
靈敏度誤差和初始絕對(duì)失調(diào)
靈敏度誤差
靈敏度是對(duì)輸入-輸出測(cè)得的傳遞函數(shù)的斜率,通常為+1g和–1g。靈敏度誤差為器件間的靈敏度偏差。例如,有些加速度計(jì)的最大靈敏度為3%。
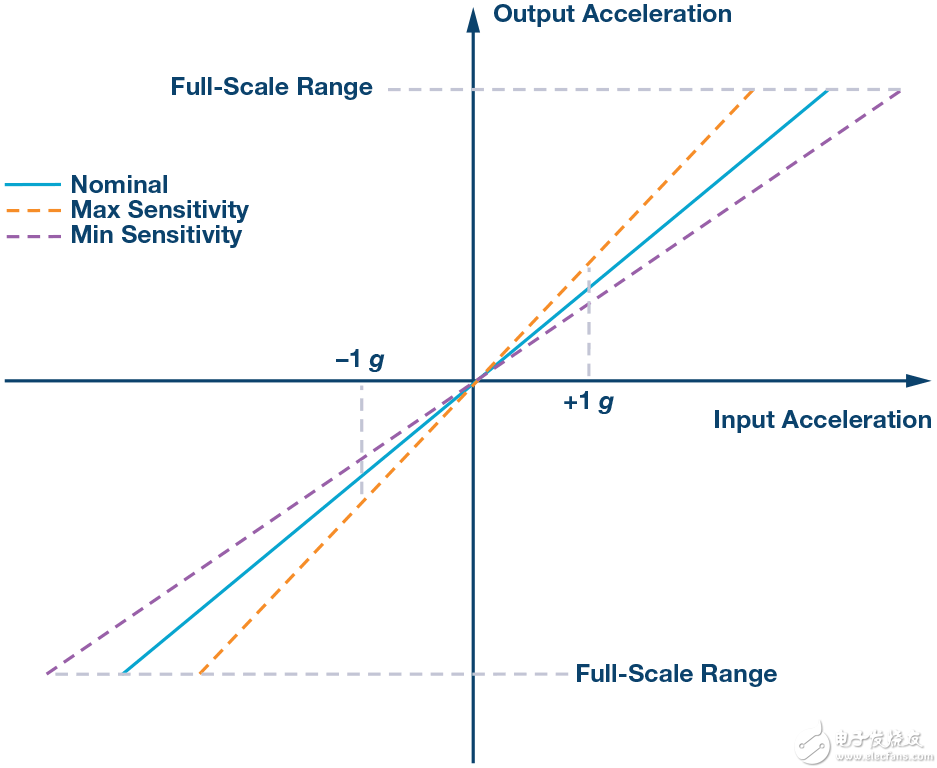 圖4. 輸入-輸出加速度靈敏度誤差。
圖4. 輸入-輸出加速度靈敏度誤差。
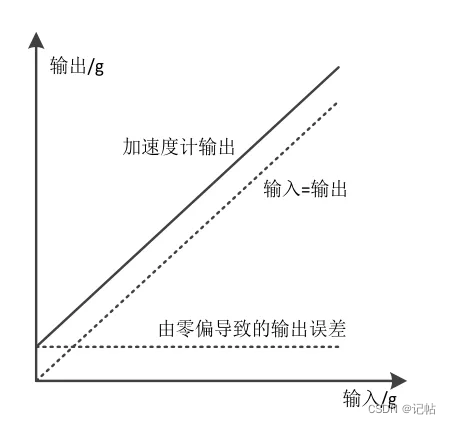
初始絕對(duì)失調(diào)
范圍內(nèi)的失調(diào)約為25°C;例如,在模塊制造完成后立即測(cè)量的值為25°C ± 5°C。初始絕對(duì)失調(diào)表示大量器件的實(shí)測(cè)偏移值的標(biāo)準(zhǔn)差。
兩點(diǎn)校準(zhǔn)
對(duì)于傾角測(cè)量應(yīng)用,兩個(gè)主要的誤差來(lái)自失調(diào)誤差和靈敏度誤差。這兩種誤差會(huì)導(dǎo)致不可接受的檢測(cè)結(jié)果,因此不得忽略。如果我們希望消除這些部分誤差,則應(yīng)對(duì)加速度輸出進(jìn)行校準(zhǔn)。一般地,要對(duì)傾角測(cè)量的失調(diào)和靈敏度進(jìn)行一次校準(zhǔn)。若要考慮失調(diào)和靈敏度誤差,則加速度計(jì)輸入與輸出的關(guān)系為:

其中:
A輸出為失調(diào)誤差,單位為g。
增益為加速度計(jì)的增益,理想值為1。
A實(shí)際為施加于加速度計(jì)的實(shí)際加速度,單位為g。
有兩種基本校準(zhǔn)技術(shù);其中一種是單點(diǎn)校準(zhǔn)。這種校準(zhǔn)的具體做法是在加速度計(jì)上施加一個(gè)0g場(chǎng),然后測(cè)量輸出。這類(lèi)校準(zhǔn)只能用于校準(zhǔn)失調(diào)誤差,不能校準(zhǔn)增益誤差。然后,從實(shí)際輸出值中減去0g場(chǎng)里的輸出結(jié)果,消除失調(diào)誤差。這種校準(zhǔn)方法非常簡(jiǎn)單,但精度不足,因?yàn)槿匀淮嬖陟`敏度誤差。另一種方法是1g翻轉(zhuǎn)校準(zhǔn),在+1g和–1g時(shí)采用兩點(diǎn)校準(zhǔn),并在每個(gè)+1g和–1g場(chǎng)內(nèi)按照以下公式測(cè)量加速度輸出:

其中,失調(diào)A失調(diào)的單位為g。
以這兩點(diǎn)信息為基礎(chǔ),可以按照以下方法解出失調(diào)和增益:

其中,+1g和 1g測(cè)量值、A+1g和A–1g均以g為單位。
經(jīng)過(guò)這一次校準(zhǔn)以后,可以用該等式計(jì)算實(shí)際加速度,每次都會(huì)消除失調(diào)誤差和靈敏度誤差。

其中,A失調(diào)和A輸出以g為單位。
非線性度
器件的非線性度為測(cè)得加速度(AMEA)與理想線性輸出加速度(AFIT)之間的最大偏差。加速度測(cè)量數(shù)據(jù)集應(yīng)包括加速度計(jì)的滿量程范圍。其測(cè)量方式為Max(|AMEA – AFIT|)。
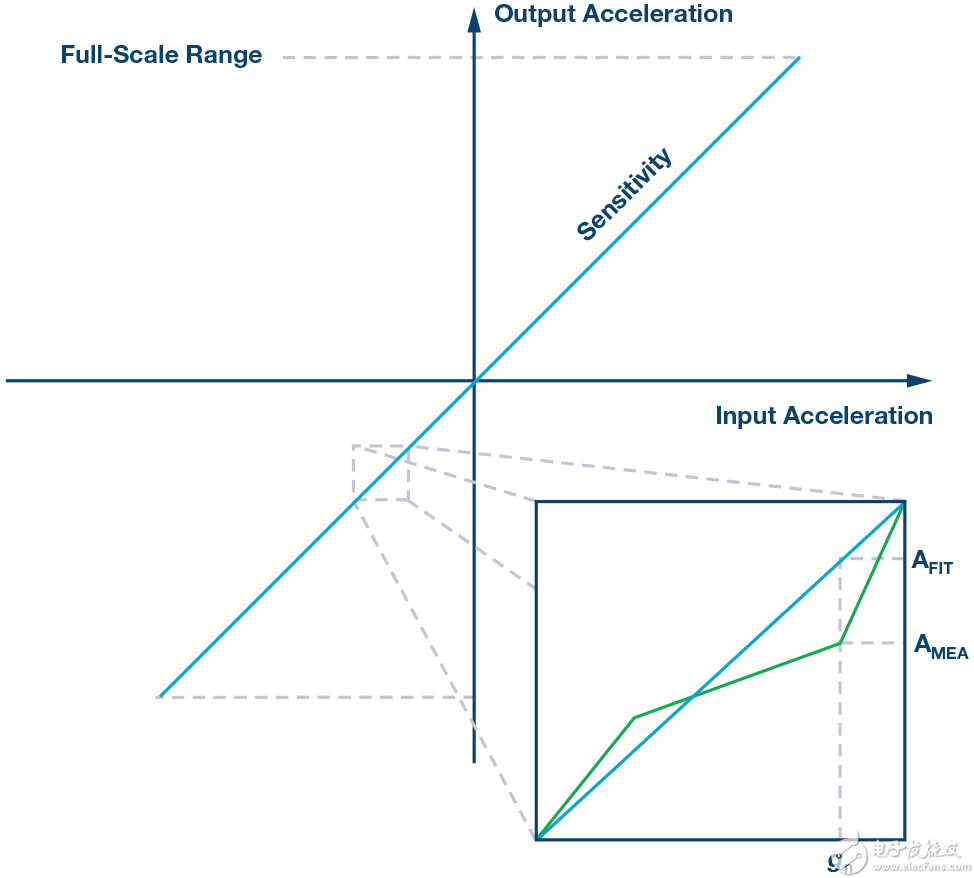 圖5. 器件非線性度。
圖5. 器件非線性度。
其中:
AMEA為給定gn下的測(cè)得加速度。
AFIT為給定gn下的預(yù)測(cè)加速度。
多數(shù)加速度計(jì)或組合器件在給定輸入加速度計(jì)范圍內(nèi)均存在非線性——例如,30 mg ± 2g的范圍。對(duì)于傾角測(cè)量應(yīng)用,輸入坡道斜率在±30°以?xún)?nèi),這意味著輸出加速度范圍在±500 mg (±1g× sin 30°)以?xún)?nèi),所以應(yīng)重新評(píng)估該范圍內(nèi)的非線性度。由于非線性度在整個(gè)輸入范圍內(nèi)是非線性的,所以,很難準(zhǔn)確地量化評(píng)估這部分誤差。然而,由于該器件的數(shù)據(jù)手冊(cè)通常都很保守,線性度為30 mg,輸入范圍為±2g,用10 mg計(jì)算±500 mg范圍內(nèi)的誤差更合理些。
與初始絕對(duì)失調(diào)的總失調(diào)變化
與初始絕對(duì)失調(diào)的總失調(diào)變化為溫度、應(yīng)力和老化效應(yīng)導(dǎo)致的失調(diào)的最大偏差。該偏差是相對(duì)于給定器件的初始絕對(duì)失調(diào)進(jìn)行測(cè)量的。這是精度總誤差的主要貢獻(xiàn)因素。
在溫度、應(yīng)力、老化等所有這些因素中,變化與溫度在總失調(diào)變化中占比很大。一般地,變化與溫度曲線是二階曲線,通常為旋轉(zhuǎn)拋物線。為了消除這部分誤差,可以在系統(tǒng)級(jí)執(zhí)行三點(diǎn)校準(zhǔn)。對(duì)于給定器件,可按下列步驟校準(zhǔn)輸出失調(diào)隨溫度的變化值。
第1步:
使器件的輸出響應(yīng)以某個(gè)?N0值偏移。溫度校準(zhǔn)流程的第一步是 消除環(huán)境溫度下的失調(diào)。
 圖6. 第1步:消除環(huán)境溫度下的失調(diào)。
圖6. 第1步:消除環(huán)境溫度下的失調(diào)。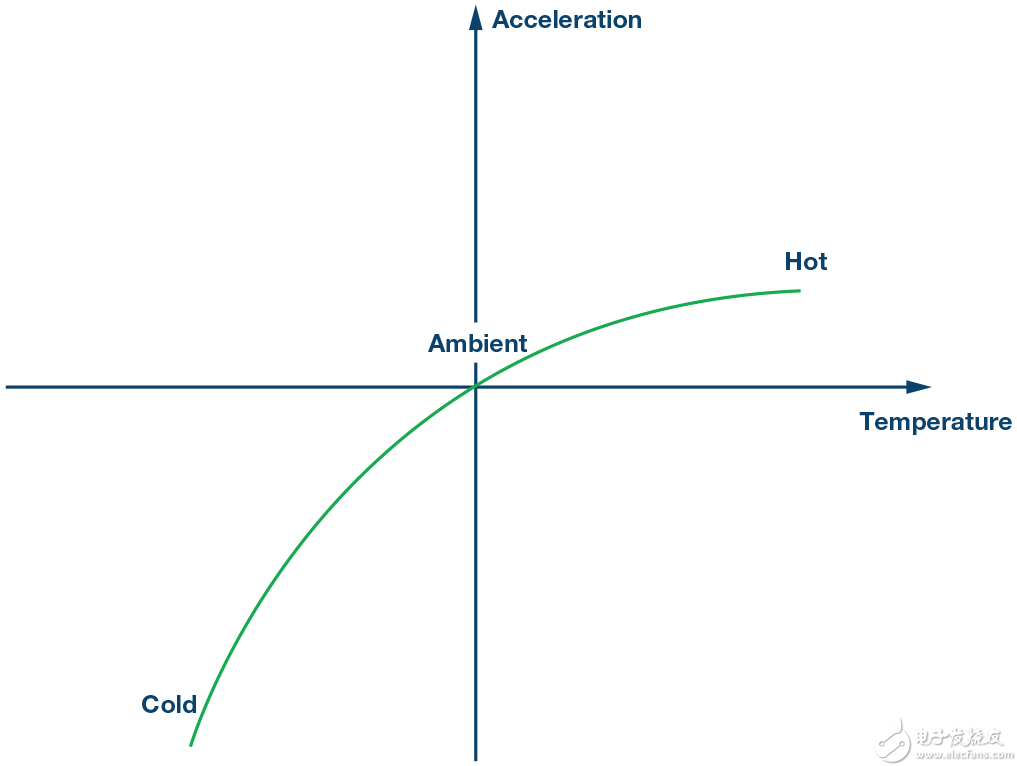 圖7. 第2步:在消除環(huán)境溫度下的失調(diào)之后。
圖7. 第2步:在消除環(huán)境溫度下的失調(diào)之后。
第2步:
接下來(lái),在高溫下測(cè)試器件,用獲得的新信息生成失調(diào)校正線性公式。
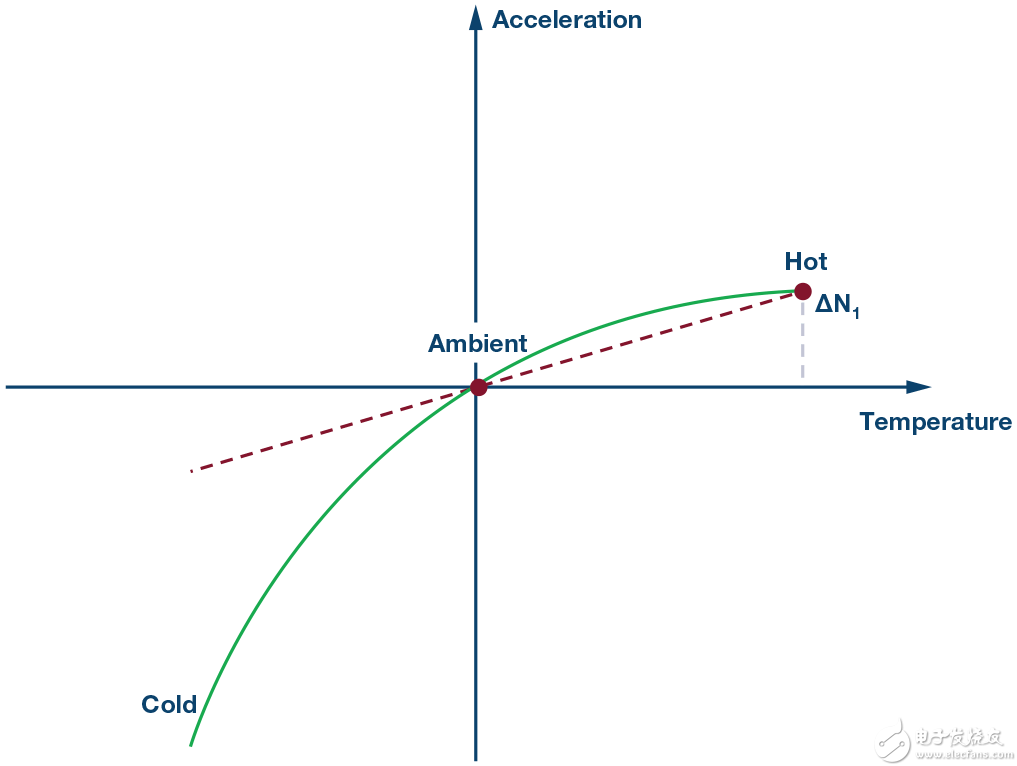 圖8. 第3步:消除高溫下的拋物線旋轉(zhuǎn)分量。
圖8. 第3步:消除高溫下的拋物線旋轉(zhuǎn)分量。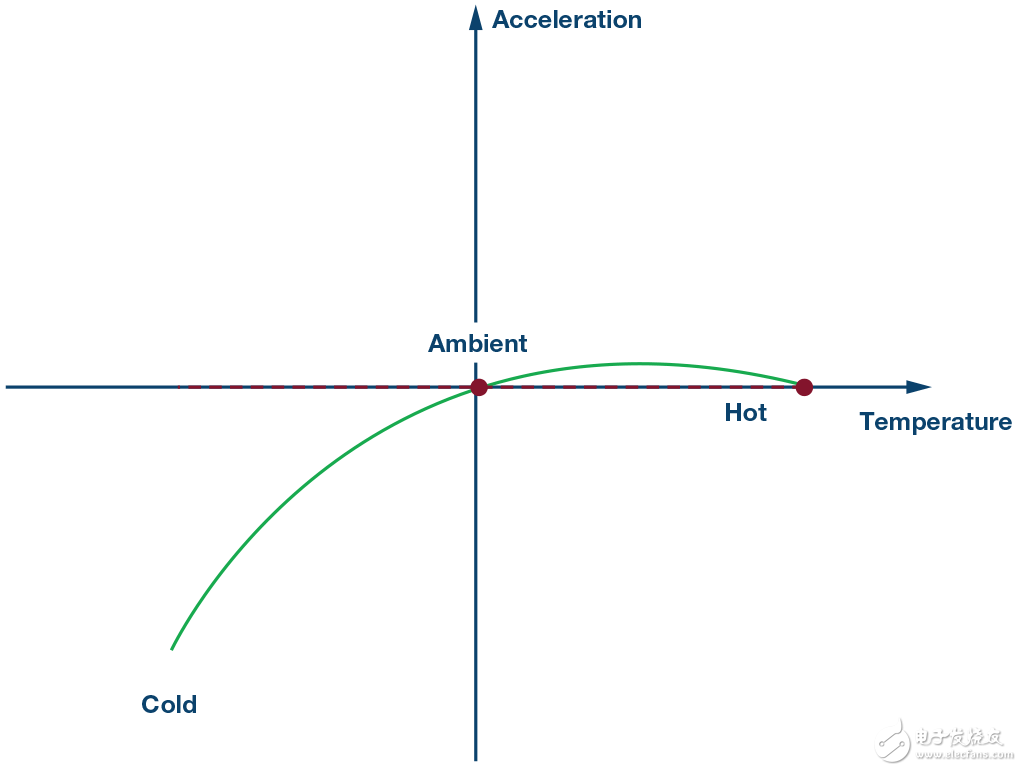 圖9. 第4步:在消除高溫下的拋物線旋轉(zhuǎn)分量之后。
圖9. 第4步:在消除高溫下的拋物線旋轉(zhuǎn)分量之后。
第3步:
給現(xiàn)有公式添加一個(gè)二階分量,校正失調(diào)剩余部分。設(shè)二階曲線遵循以下公式:

這是二階拋物線公式,已經(jīng)通過(guò)第1步和第2步消除了旋轉(zhuǎn)分量。
在該公式中,該二階拋物線有三個(gè)解:

然后,我們可以得到溫度系數(shù) a, b, c.
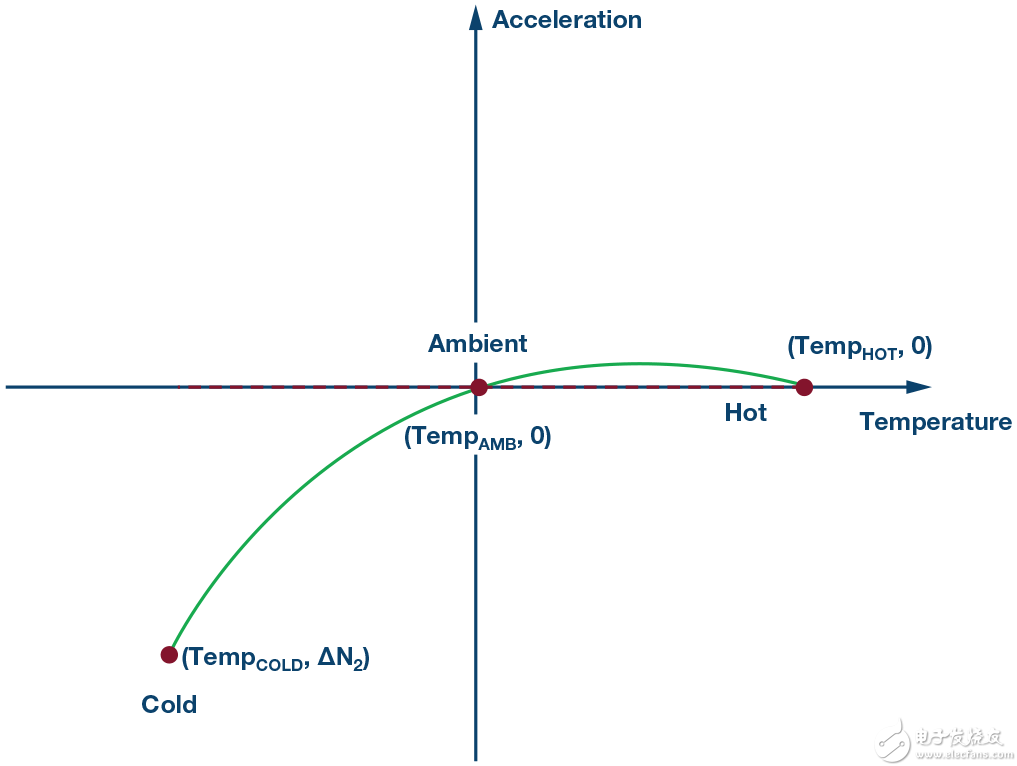 圖10. 第5步:添加二階分量,消除剩余失調(diào)。
圖10. 第5步:添加二階分量,消除剩余失調(diào)。
有關(guān)?N0,?N1, ?N2, a, b, c 的所有溫度系數(shù)信息應(yīng)該存儲(chǔ)在系統(tǒng)非易失性存儲(chǔ)器中,同時(shí)需要一個(gè)板載溫度傳感器。系統(tǒng)會(huì)在每次上電后例行校準(zhǔn)加速度計(jì),確保消除失調(diào)隨溫度的變化值。
噪聲
基于單個(gè)數(shù)據(jù)樣本測(cè)量?jī)A角不一定可靠。即使加速度計(jì)的噪聲為零,傾角測(cè)量也是在汽車(chē)啟動(dòng)時(shí)測(cè)量的,所以,需要減小發(fā)動(dòng)機(jī)、過(guò)往車(chē)輛或乘客在車(chē)上來(lái)回移動(dòng)導(dǎo)致的任何振動(dòng)。最好的辦法是在不降至最低數(shù)據(jù)速率要求的條件下,在盡量長(zhǎng)的時(shí)間內(nèi)做數(shù)據(jù)平均。數(shù)據(jù)平均算法會(huì)減少rms噪聲。
假如我們對(duì)噪聲采樣,結(jié)果可得到每個(gè)樣本的方差

求一個(gè)隨機(jī)變量的均值,獲得以下方差,

由于噪聲方差保持于σ2不變,

以上推導(dǎo)顯示,對(duì)同一未校正噪聲的n次實(shí)現(xiàn)求均值可使噪聲功率減少n倍,并使rms噪聲減少√n。
由于隨機(jī)噪聲受高斯分布影響,所以,rms噪聲等于高斯分布的標(biāo)準(zhǔn)差。6σ以?xún)?nèi)的最小分布為97%。
例如,如果以1 kSPS的采樣率對(duì)每100 ms的數(shù)據(jù)求均值,則最大rms噪聲 = 0.4 mg,即是說(shuō)如果以6σ作為與平均值的距離,則此時(shí)的峰值噪聲僅為2.4 mg。
用于與rms值相乘的因數(shù)取決于器件要執(zhí)行的任務(wù)的統(tǒng)計(jì)需求。例如,如果選擇6作為因數(shù)(峰峰值噪聲為6 × RMS_Noise),則算法在器件生命周期內(nèi)要運(yùn)行的次數(shù)會(huì)影響超過(guò)最差情況6 × RMS_Noise 的概率。可總結(jié)如下:

E為在生命周期內(nèi)超過(guò)最差情況的預(yù)期次數(shù),M為生命周期內(nèi)的運(yùn)行次數(shù),r為超過(guò)最差情況的概率。基于此,我們可以通過(guò)乘以rms噪聲評(píng)估出一個(gè)合理的因數(shù)。
小結(jié)
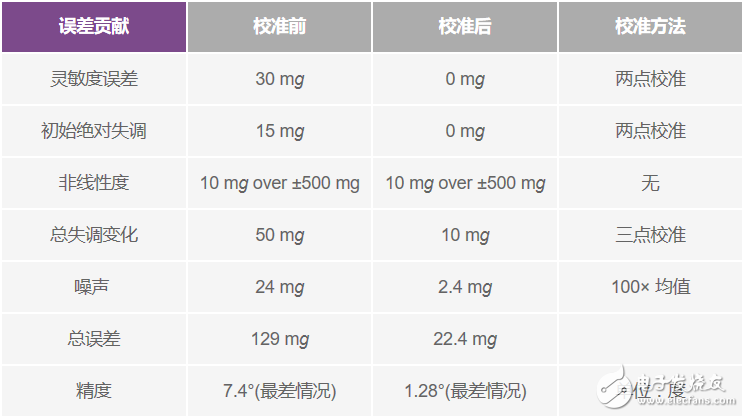
以ADI公司的ADXC1500/ADXC1501(組合式陀螺儀和2軸/3軸加速度 計(jì))為例,所有誤差貢獻(xiàn)項(xiàng)均列于表1中,包括校準(zhǔn)和不校準(zhǔn)兩種情況。我們可以假設(shè),總失調(diào)變化為二次曲線,并且其在溫度范圍內(nèi)的變化占總失調(diào)變化的80%。另外,以6為因數(shù)乘以最大rms噪聲。
一個(gè)陀螺儀和一個(gè)三軸加速度計(jì)的單芯片集成方案可以實(shí)現(xiàn)多種新型應(yīng)用,尤其是在汽車(chē)安全系統(tǒng)和工業(yè)自動(dòng)化應(yīng)用領(lǐng)域。為了設(shè)計(jì)更加可靠、高精度的汽車(chē)安全系統(tǒng),例如,穩(wěn)定的電子控制系統(tǒng)(ESC)和側(cè)翻檢測(cè)系統(tǒng),盡量減少系統(tǒng)誤差至關(guān)重要。汽車(chē)中已安裝這些傳統(tǒng)型底盤(pán)控制系統(tǒng),包括防抱死制動(dòng)系統(tǒng)、牽引控制和偏航控制系統(tǒng)。
表1. 校準(zhǔn)前后的誤差貢獻(xiàn)
-
陀螺儀
+關(guān)注
關(guān)注
44文章
788瀏覽量
98833 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
704瀏覽量
45936
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ADXL345超低功耗3軸加速度計(jì)中文手冊(cè)
MEMS加速度計(jì)的工作原理是什么
具有TLV2772的3V加速度計(jì)

EPSON工業(yè)級(jí)加速度計(jì)選型

陀螺儀LSM6DSOW開(kāi)發(fā)(9)----加速度校準(zhǔn)

e2studio開(kāi)發(fā)三軸加速度計(jì)LIS2DW12(4)----測(cè)量傾斜度

e2studio開(kāi)發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢(xún)獲取加速度數(shù)據(jù)
ADXL355三軸加速度計(jì)手冊(cè)
三軸加速度計(jì)LIS2DUX12開(kāi)發(fā)(2)----靜態(tài)校準(zhǔn)
e2studio開(kāi)發(fā)三軸加速度計(jì)LIS2DW12(4)----測(cè)量傾斜度
三軸加速度計(jì)LIS2DW12開(kāi)發(fā)(4)----測(cè)量傾斜度
備受青睞的MEMS加速度計(jì),更小尺寸、更低功耗、更智能
采用可調(diào)電熱微梁的近零剛度MEMS加速度計(jì)

Kistler推出了8740A和8788A系列加速度計(jì)
MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論