

端到端自動駕駛框架實現(xiàn)了感知與規(guī)劃的無縫集成,但通常依賴于一次性軌跡預(yù)測,這可能導(dǎo)致控制不穩(wěn)定,并且對單頓感知中的遮擋問題較為敏感。為解決這一問題,我們提出了動量感知駕駛框架Momentum-Aware Driving(MomAD),該框架引I入了軌跡動量和感知動量,以穩(wěn)定和優(yōu)化軌跡預(yù)測。
MomAD包含兩個核心組件:一是拓?fù)滠壽E匹配(TTM),采用豪斯多夫距離選擇與先前路徑一致的最優(yōu)規(guī)劃查詢,以確保連貫性;二是動量規(guī)劃交互器(MPI),通過交叉注意力機制將選定的規(guī)劃查詢與歷史查詢相結(jié)合,擴展靜態(tài)和動態(tài)感知文件。這種豐富的查詢反過來有助于重新生成長時間跨度的軌跡,并降低碰撞風(fēng)險。為了減輕動態(tài)環(huán)境和檢測誤差帶來的噪聲,我們在訓(xùn)練過程中引入了魯棒的實例去噪,使規(guī)劃模型能夠?qū)W⒂陉P(guān)鍵信號并提高其魯棒性。我們還提出了一種新的軌跡預(yù)測一致性(TPC)指標(biāo),用于定量評估規(guī)劃的穩(wěn)定性。
在nuScenes數(shù)據(jù)集上的實驗表明,MomAD在長期一致性(>3s)方面優(yōu)于現(xiàn)有的最先進方法。此外,在精心設(shè)計的Turning-nuScenes數(shù)據(jù)集上的評估顯示,MomAD在6秒預(yù)測時間范圍內(nèi)將碰撞率降低了26%,并將TPC提高了0.97米(33.45%),而在Bench2Drive上的閉環(huán)測試中,成功率提高了16.3%。
? 論文鏈接:
https://arxiv.org/abs/2503.03125
?論文代碼:
https://github.com/adept-thu/MomAD
研究背景
自動駕駛技術(shù)經(jīng)歷了從模塊化到更集成化的端到端范式的轉(zhuǎn)變。傳統(tǒng)方法將檢測、跟蹤、地圖構(gòu)建、運動預(yù)測和規(guī)劃等任務(wù)分開處理,而端到端框架則強調(diào)這些任務(wù)的無縫集成。通過優(yōu)先考慮規(guī)劃,端到端框架能夠戰(zhàn)略性地引導(dǎo)來自上游感知模塊的信息,從而增強動態(tài)駕駛環(huán)境中的魯棒性和可靠性。高質(zhì)量的規(guī)劃依賴于準(zhǔn)確預(yù)測自車未來的軌跡,這需要對靜態(tài)和動態(tài)環(huán)境因素(如地圖元素和與周圍交通參與者的交互)有長遠(yuǎn)的理解。
然而,由于其他道路使用者意圖的不確定性、道路條件的變化以及人類駕駛行為引入的模糊性,軌跡預(yù)測本質(zhì)上是隨機的,這使得確定性預(yù)測變得次優(yōu)甚至具有風(fēng)險。現(xiàn)有的多模態(tài)軌跡規(guī)劃方法雖然能夠考慮多種可能的交通參與者行為,但它們通常是基于當(dāng)前感知幀的一次性預(yù)測,容易受到遮擋或關(guān)鍵視覺線索丟失的影響,導(dǎo)致軌跡質(zhì)量下降。此外,缺乏時間一致性可能導(dǎo)致連續(xù)軌跡缺乏連貫性,引發(fā)不穩(wěn)定的車輛控制。為了解決這些問題,本文提出了動量感知駕駛框架 (MomAD) ,通過引入軌跡動量和感知動量來穩(wěn)定和優(yōu)化軌跡預(yù)測,從而在動態(tài)駕駛環(huán)境中實現(xiàn)更平滑和一致的規(guī)劃結(jié)果。
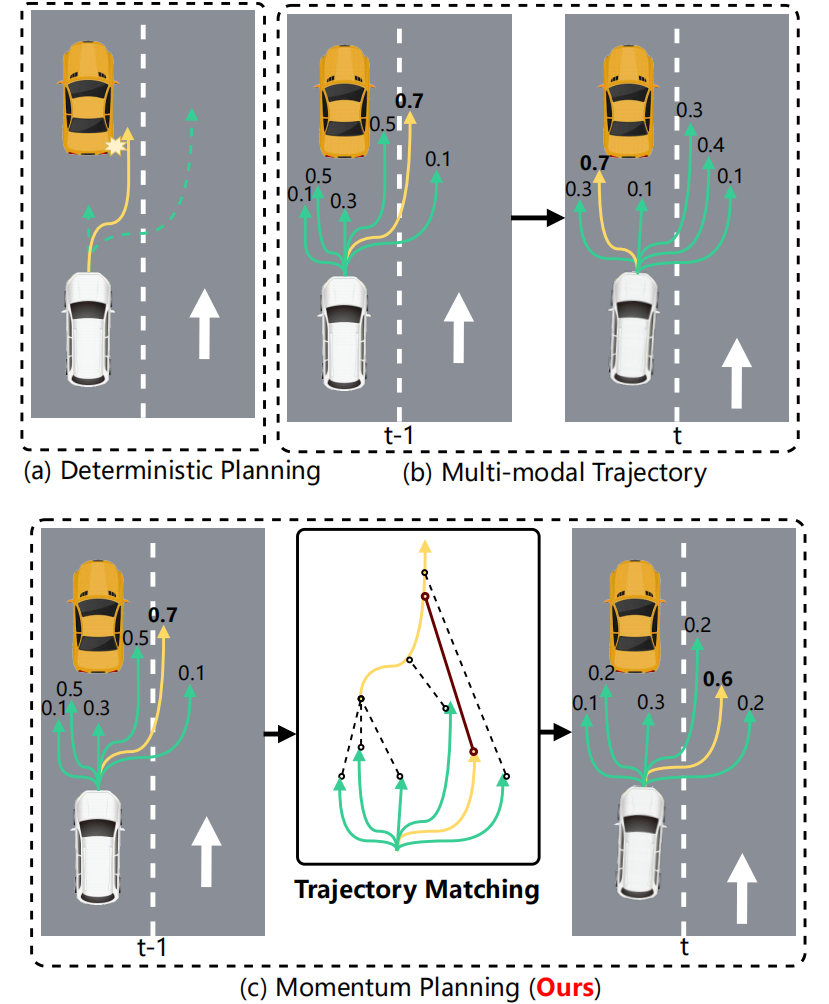
根據(jù)上圖對比我們可以看到,(a) 確定性規(guī)劃的方案,缺乏動作多樣性,存在安全風(fēng)險;(b)多模態(tài)軌跡規(guī)劃方案,通過選擇最高分軌跡,但存在最大分?jǐn)?shù)偏移問題導(dǎo)致穩(wěn)定性不足;(c)我們提出的MomAD巧妙利用“慣性”的思想,通過動量規(guī)劃,利用歷史和感知動量提升時序一致性,解決端到端自動駕駛中不穩(wěn)定行駛的問題。
研究方法
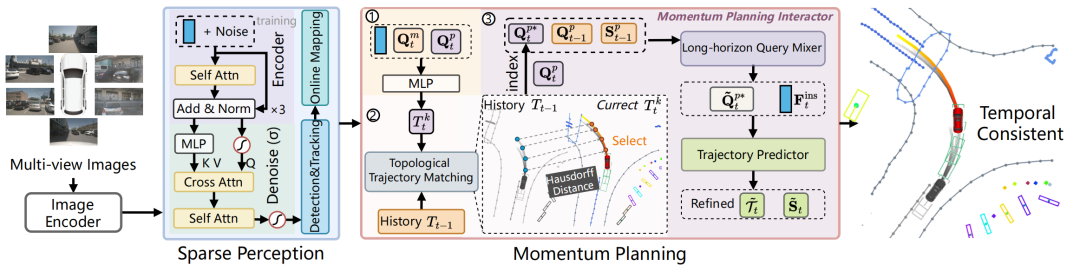
Topological Trajectory Matching
該模塊通過Hausdorff距離選擇與歷史路徑最匹配的多模態(tài)軌跡提案,以確保時序一致性和軌跡的連續(xù)性。具體來說,TTM模塊通過最小化不同時間步之間的規(guī)劃差異,防止軌跡偏離歷史軌跡。
Momentum Planning Interactor
該模塊通過長時查詢混合器將當(dāng)前最佳規(guī)劃查詢與歷史規(guī)劃查詢進行交叉注意力處理,擴展靜態(tài)和動態(tài)感知文件,從而豐富當(dāng)前查詢的上下文信息。MPI模塊通過結(jié)合歷史查詢和當(dāng)前查詢,生成改進的軌跡預(yù)測,增強了對周圍環(huán)境的感知能力。
Robust Instance Denoising via
Perturbation
在訓(xùn)練過程中引入受控噪聲擾動,使模型能夠區(qū)分關(guān)鍵和無關(guān)特征,提高對感知噪聲的魯棒性。通過這種方式,模型在測試時能夠更好地應(yīng)對實例特征的波動,生成更穩(wěn)定和平滑的軌跡。
結(jié)果與分析
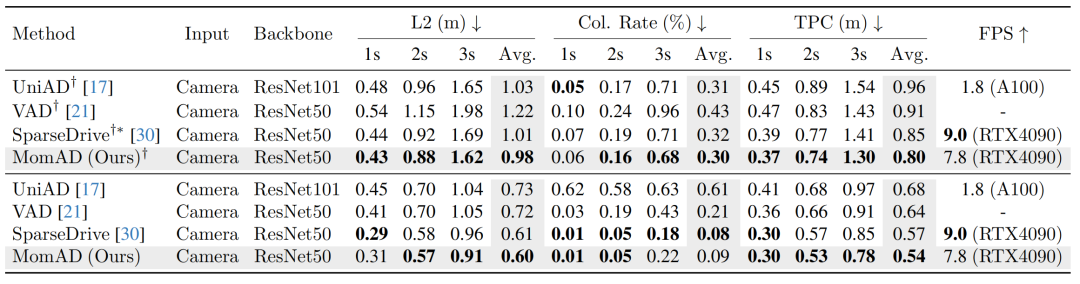
如表所示,MomAD在L2誤差、碰撞率和TPC(軌跡預(yù)測一致性)上分別達(dá)到了0.60米、0.09%和0.54米。與UniAD、VAD和SparseDrive等最先進方法相比,我們的方法在規(guī)劃結(jié)果上表現(xiàn)出色。值得注意的是,我們在TPC指標(biāo)上取得了顯著改進,在nuScenes數(shù)據(jù)集上1秒、2秒和3秒的TPC分別提升了0.30米、0.53米和0.78米,直接證明了我們在時間一致性方面的有效性。
總體而言,MomAD有效利用了動量的平滑優(yōu)勢,在提升時間一致性方面效果顯著。
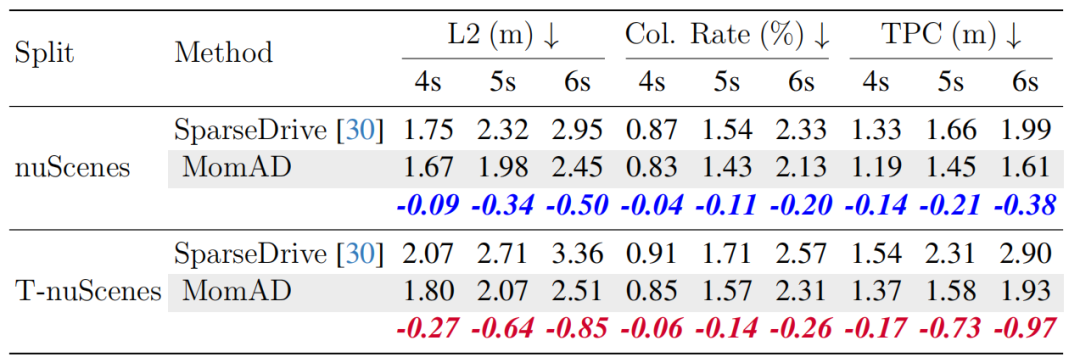
準(zhǔn)確的長軌跡預(yù)測對于提升自動駕駛的穩(wěn)定性至關(guān)重要,同時也有助于評估模型解決多模態(tài)軌跡規(guī)劃中時間一致性問題的能力。如表所示,我們在nuScenes和Turning-nuScenes數(shù)據(jù)集上對比了SparseDrive和MomAD在4-6秒長軌跡預(yù)測中的表現(xiàn),結(jié)果顯示MomAD在性能上有顯著提升。
具體而言,在nuScenes數(shù)據(jù)集中,與SparseDrive相比,MomAD在4秒、5秒和6秒的L2誤差分別降低了0.09米(5.14%)、0.34米(14.66%)和0.50米(16.95%),碰撞率分別降低了0.04%、0.11%和0.20%,TPC(軌跡預(yù)測一致性)分別降低了0.14米(10.53%)、0.21米(12.65%)和0.38米(19.10%)。
此外,在Turning-nuScenes數(shù)據(jù)集中,與SparseDrive相比,MomAD在4秒、5秒和6秒的L2誤差分別降低了0.27米(13.04%)、0.64米(23.62%)和0.85米(25.30%),碰撞率分別降低了0.06%、0.14%和0.26%,TPC分別降低了0.17米(11.04%)、0.73米(31.60%)和0.97米(32.45%)。
可以觀察到,MomAD在更遠(yuǎn)距離的軌跡預(yù)測上表現(xiàn)顯著提升,尤其是在6秒時的改進幅度最大。總體而言,MomAD提升了長軌跡預(yù)測的性能,進一步證明了其能夠有效緩解時間一致性問題。
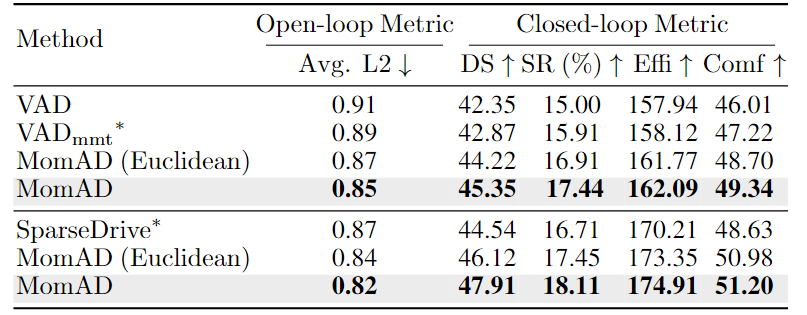
我們已在Bench2Drive數(shù)據(jù)集上進行了具有挑戰(zhàn)性的閉環(huán)評估,結(jié)果如表所示。該數(shù)據(jù)集涵蓋44個交互場景,例如切入、超車、繞行,以及220條路線,覆蓋多種天氣條件和地點。我們的MomAD框架在成功率上分別比VAD多模態(tài)變體和SparseDrive分別提高了16.3%和8.4%,并在舒適度評分(軌跡平滑度)上分別提升了7.2%和5.3%,證明了其有效性。
結(jié)論
MomAD框架通過引入軌跡動量和感知動量,顯著提高了端到端自動駕駛系統(tǒng)在軌跡規(guī)劃中的穩(wěn)定性和魯棒性。未來工作將探索擴散模型和推測解碼方法,以進一步提高軌跡多樣性和效率。
.
-
模型
+關(guān)注
關(guān)注
1文章
3427瀏覽量
49514 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1214瀏覽量
25018 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14020瀏覽量
167904
原文標(biāo)題:CVPR 2025|MomAD:動量感知規(guī)劃的端到端自動駕駛
文章出處:【微信號:horizonrobotics,微信公眾號:地平線HorizonRobotics】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
自動駕駛的到來
即插即用的自動駕駛LiDAR感知算法盒子 RS-Box
智能感知方案怎么幫助實現(xiàn)安全的自動駕駛?
自動駕駛技術(shù)的實現(xiàn)
如何基于深度神經(jīng)網(wǎng)絡(luò)設(shè)計一個端到端的自動駕駛模型?
PowerBEV的高效新型端到端框架基于流變形的后處理方法

端到端自動駕駛到底是什么?

基于矢量化場景表征的端到端自動駕駛算法框架

理想汽車自動駕駛端到端模型實現(xiàn)

理想汽車加速自動駕駛布局,成立“端到端”實體組織
實現(xiàn)自動駕駛,唯有端到端?

Mobileye端到端自動駕駛解決方案的深度解析

連接視覺語言大模型與端到端自動駕駛






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論