

“這是一個還在迭代中的項目。開源的回聲測深儀/水深測量儀/聲吶系統,適用于水文測繪及科研用途。基于Arduino平臺開發并具備良好兼容性”
 ? Open Echo 概覽
? Open Echo 概覽
作為持續迭代的開源硬件項目,Open Echo 致力于構建高精度聲吶系統,主要應用于水文測繪與科研探測領域。項目遵循完全開源協議,目前已在GitHub平臺公開全部技術資料(代碼庫、原理圖、PCB文件):
https://github.com/Neumi/open_echo
回聲測深儀是一種用于測量水深的設備,它發出短促的聲波(通常是超聲波),然后等待回聲返回。通過測量回聲返回所需的時間,該裝置可以計算出超聲波傳感器下方的水深。
幾乎所有船只都使用回聲測深儀來導航和確保安全。研究人員依靠它們進行測深、繪圖和考古研究。搜救(SAR)隊使用它們進行定位和打撈,而漁民則使用它們來確定魚類豐富區域的位置。
我需要一個與 Arduino 兼容的回聲測深儀用于另一個水深 GPS 記錄設備項目。可讀取 Arduino 的回聲測深儀很難買到,所以我想,為什么不自己制作呢?基本工作原理很簡單,但底層的電子學和物理學并不總是那么簡單。
因此,我接受了挑戰,并立即投入其中......
項目當前狀態
部分逆向工程 "LUCKY 魚群探測器"
從回聲接收器/放大器向 FastLOGIC/Arduino 獲取原始數據
使用 Matplotlib + Python 將數據繪制成瀑布圖
制作并測試 DIY 傳感器(正常工作)
制作并測試 TUSS4470 電路板(正常工作)
完成 TUSS4470 Arduino 代碼示例
更改 TUSS4470 硬件,以支持變壓器驅動更高電壓的壓電元件(例如用于水下的 200kHz)
水下測試成功!(僅測試到 3 米范圍)
可以使用 Arduino 讀取帶有 DIY 傳感器(或庫存)的 LUCKY 魚探儀的 RAW 放大器(回聲)數據,并使用 Matplotlib + Python 顯示數據。
新的 TUSS4470 電路板現在可以使用傳感器(已測試 40kHz 和 200kHz)、驅動傳感器、接收回聲、過濾信號并將 RAW 回聲數據發送到 Python 后端。為了獲得良好的效果,在 XT30 連接器上使用直流 25V 電壓。
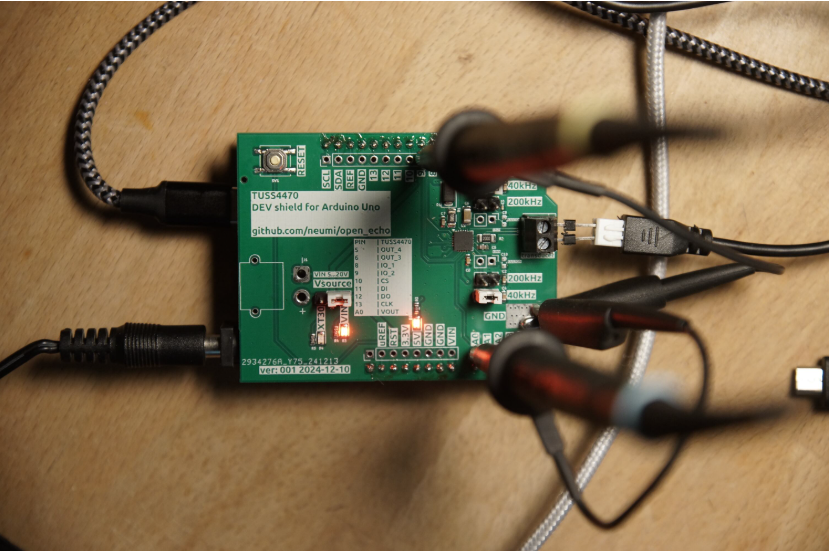
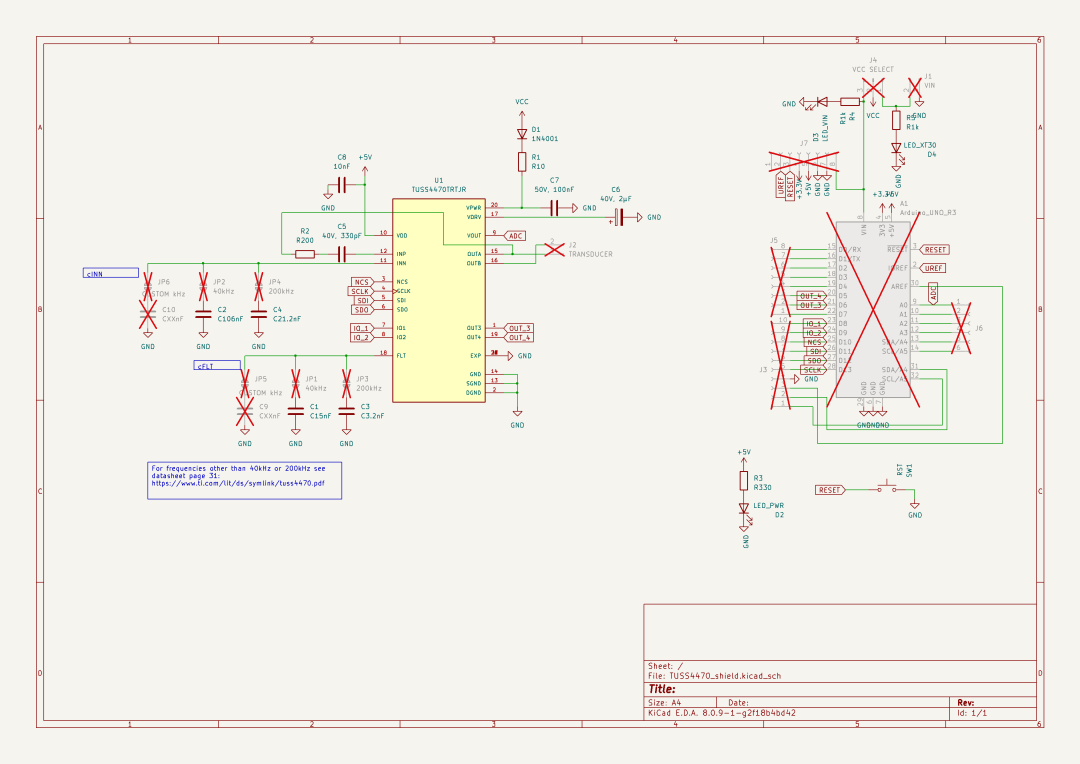
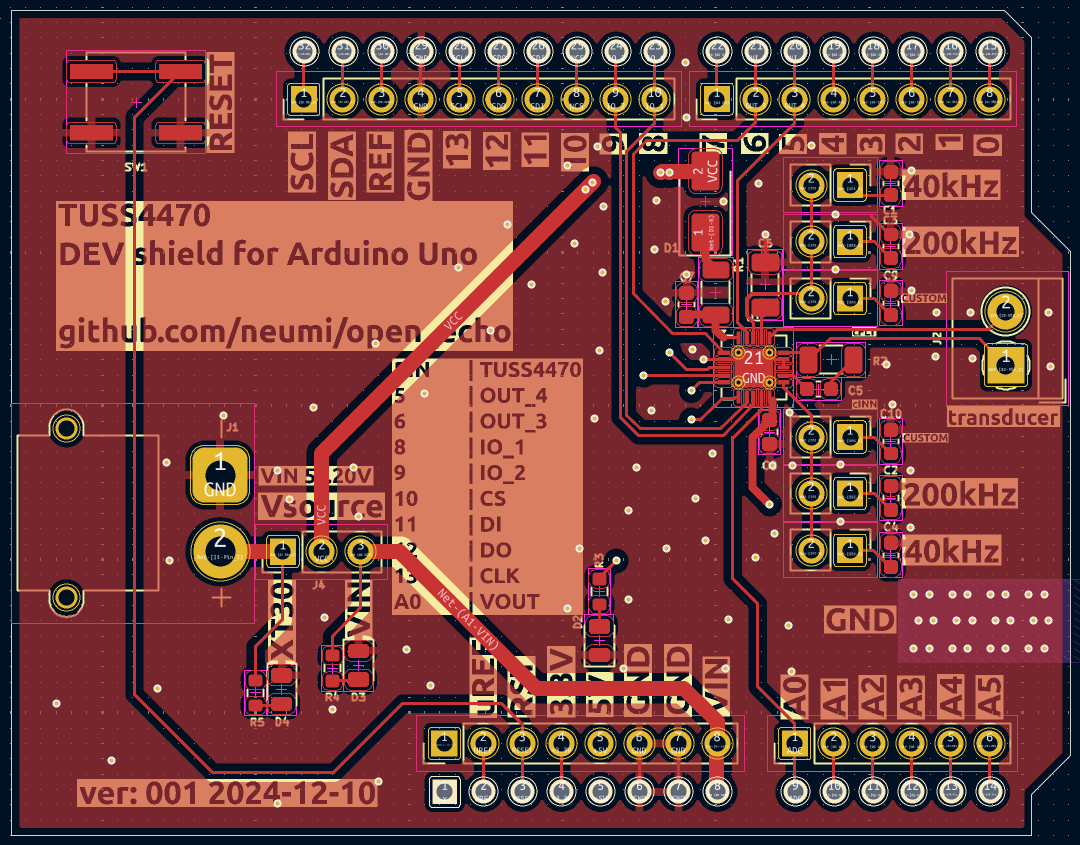
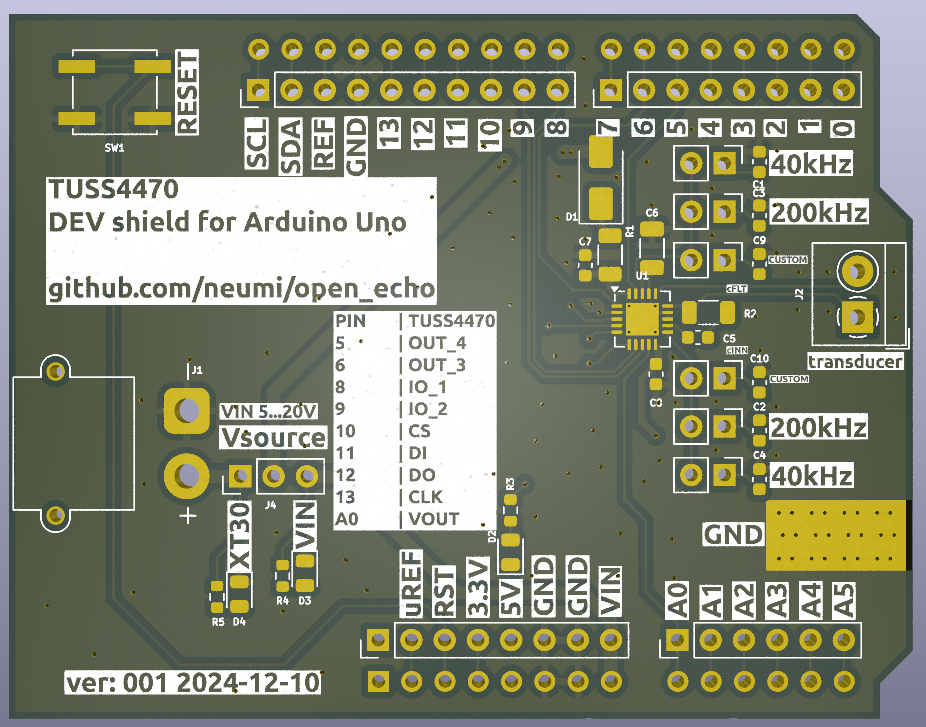
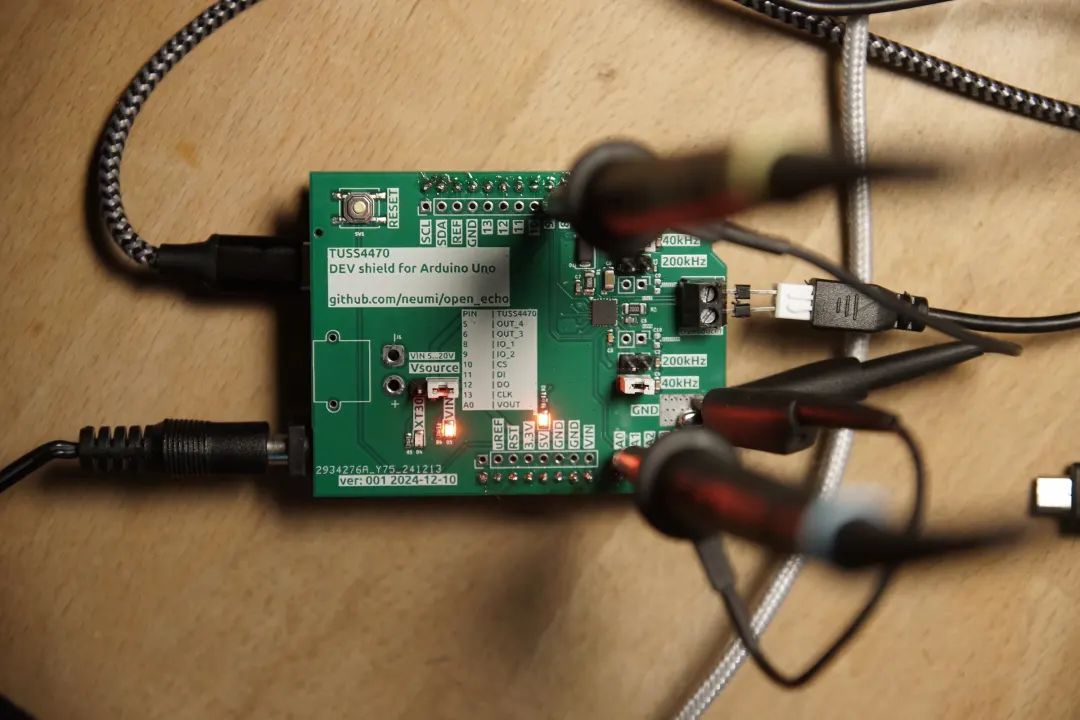
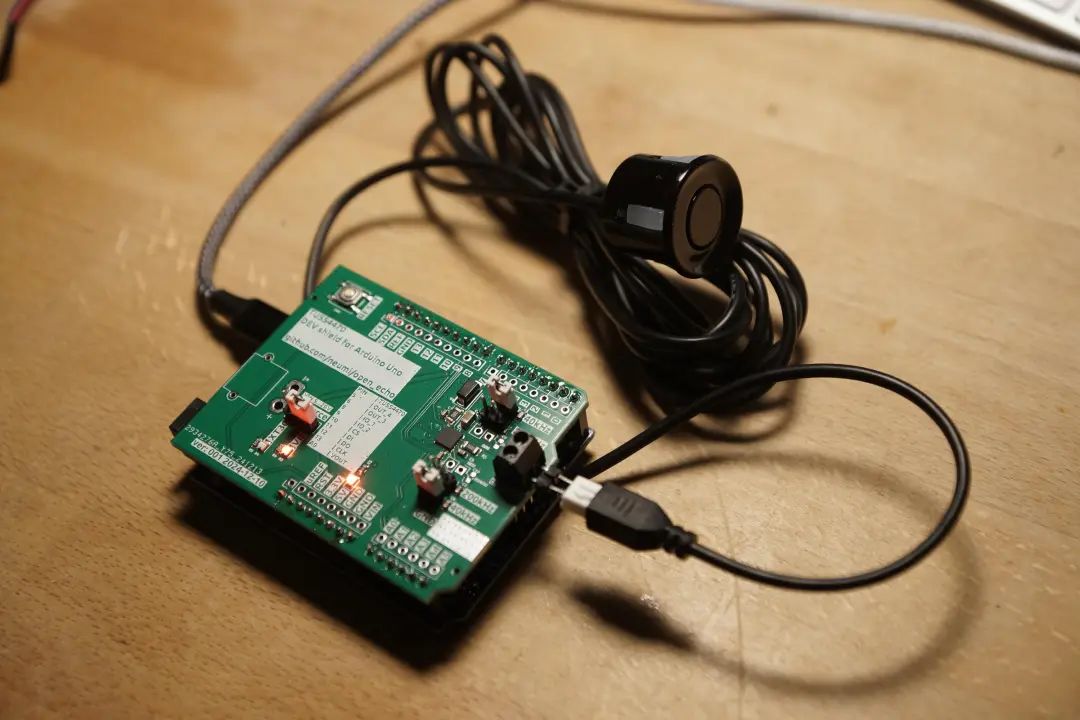
TUSS4470 超聲波傳感器驅動器 Arduino 板
該 PCB 板與 Arduino (Uno) 兼容,用于測試 TI 的 TUSS4470 超聲波驅動器集成電路。所提供的 Arduino UNO 示例代碼可讓您驅動一個 40kHz 的傳感器,應用噪聲過濾,并通過串行接口將回聲發送到 Python 后端。您可以根據自己的需要修改代碼(如使用其他頻率、采樣大小、速度等)。Arduino UNO 的時鐘速度和 RAM 大小限制了采樣速度,使其在空氣中的分辨率約為 1-2 厘米,在水中的分辨率約為 4 厘米(約 13uS/sample ),采樣次數約為 850 次。Arduino MEGA 可以部分解決這個問題。
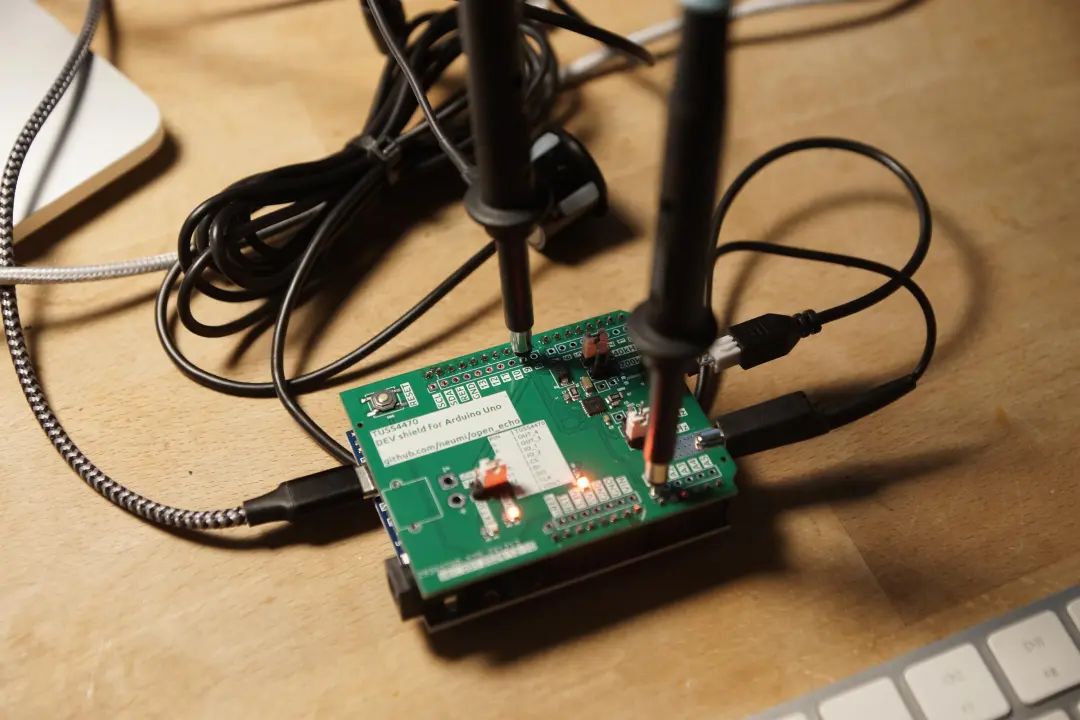
TUSS4470 Arduino Shield:
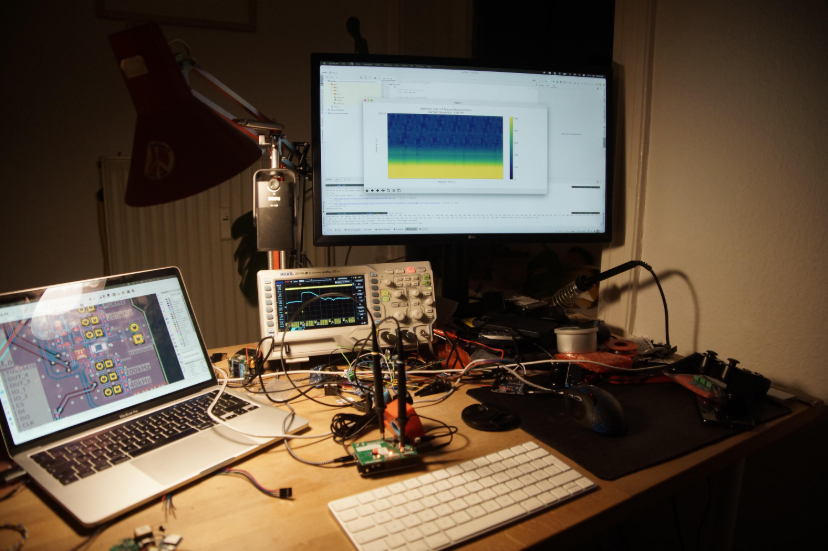
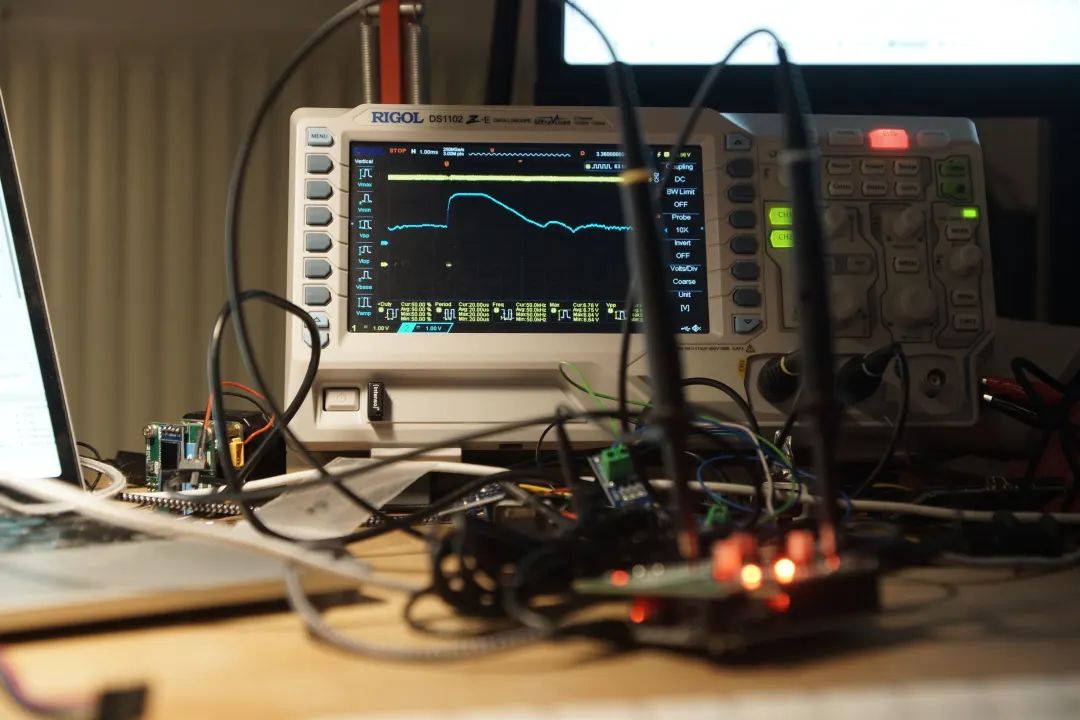
TUSS4470 的工作原理如下: 初始設置完成后,Arduino 通過 PIN9 向 TUSS4470 發送 8 個驅動頻率脈沖串。TUSS4470 將此脈沖發送至傳感器,然后等待。傳感器將此脈沖作為短脈沖聲音發送出去。障礙物反射的回聲反彈到傳感器,并在產生電壓。TUSS4470 會測量該電壓,對其進行過濾和放大,然后將其發送到 Arduino 的 A0 引腳。通過讀取放大后的電壓,可以檢測到一個(或多個)障礙物。Python 腳本將這些數據繪制成瀑布圖。
用于水下的帶 1:6 變壓器和 228kHz 的 DIY 傳感器組件:

使用 DIY 傳感器組件進行測試的回聲圖: 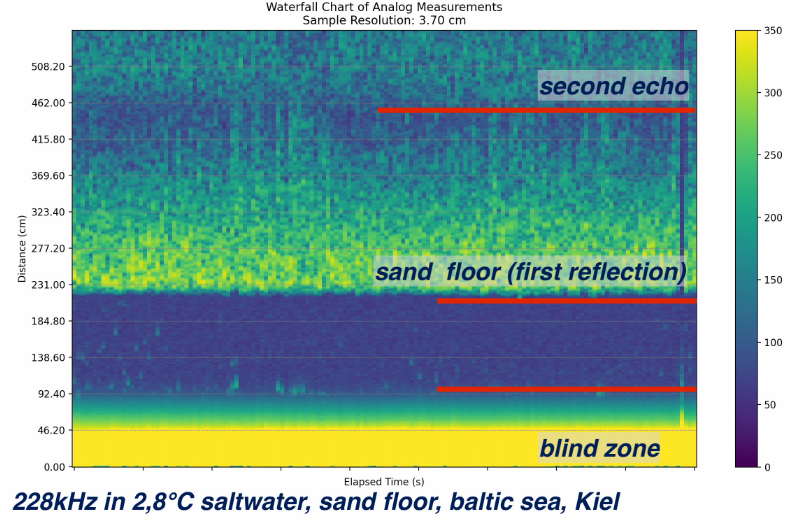 海水環境垂直向與水平向聯合探測(8倍速采集),后半程水下呈階梯結構: ? 200kHz 19 毫米的傳感器可以穿透 20 毫米厚的冰層,結果依然良好。在傳感器表面和冰層之間有一層液態水很重要。與傳感器和水之間沒有冰層相比,回聲較弱,但地面仍清晰可見,甚至還有第二次反射。
海水環境垂直向與水平向聯合探測(8倍速采集),后半程水下呈階梯結構: ? 200kHz 19 毫米的傳感器可以穿透 20 毫米厚的冰層,結果依然良好。在傳感器表面和冰層之間有一層液態水很重要。與傳感器和水之間沒有冰層相比,回聲較弱,但地面仍清晰可見,甚至還有第二次反射。  ?
? 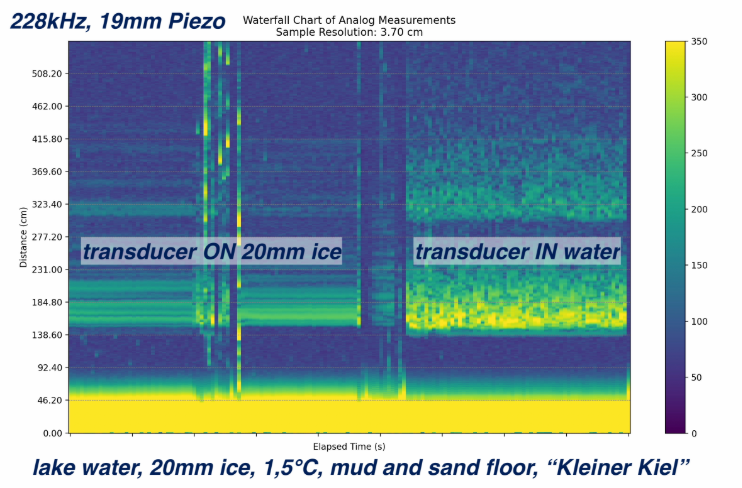
瀑布圖可以讓您更好地了解過去的情況,并更好地區分真正的回聲和噪音。壓電傳感器在發出聲音脈沖后很長時間內會產生振蕩。這是圖中較低的黃色部分(約 50 厘米)。在這個盲區內,您不會看到回聲或反射。
回聲測深儀的探測范圍不僅取決于電子設備,還在很大程度上取決于換能器頻率和使用介質。例如,上述 200kHz 設置在空氣中的范圍只有 50 厘米,但在海水中至少有 8 米。這是介質衰減(取決于頻率)和波束形狀(在每種介質中都不同)造成的。作為一個良好的起點,200kHz 適合水下使用。
如前所述,波束形狀在很大程度上取決于頻率。直徑為 10 毫米、頻率為 100 千赫的傳感器的波束開角約為 130°,相同尺寸、頻率為 200 千赫的傳感器的波束開角約為 55°。頻率越高,光束越窄。但衰減也會增加。
此外,波長越短(頻率越高),您能看到的細節就越小。海水中 200 千赫的聲音信號波長約為 7.5 毫米。可分辨的最小物體約為波長的一半,即約 3.75 毫米。
正在開發中的新PCB
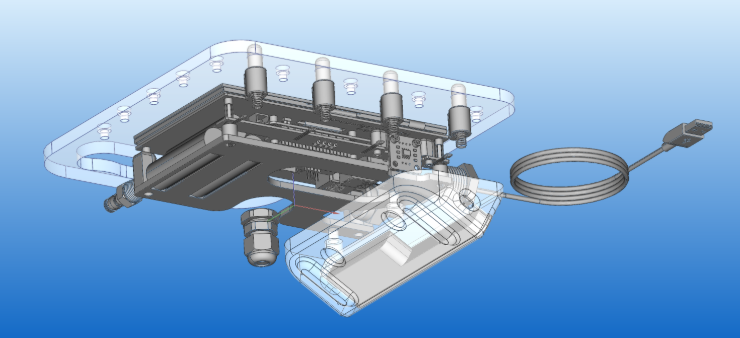
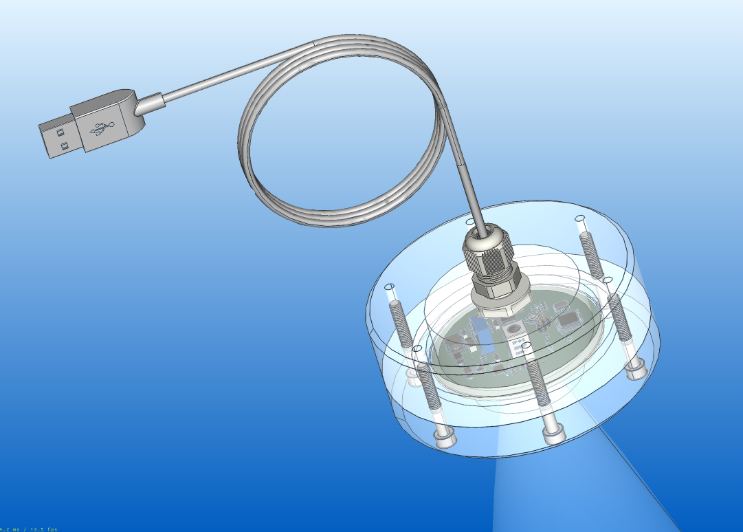
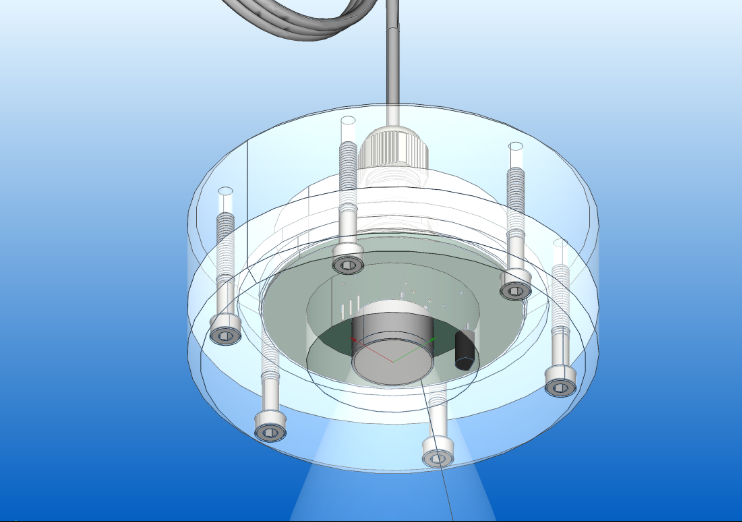
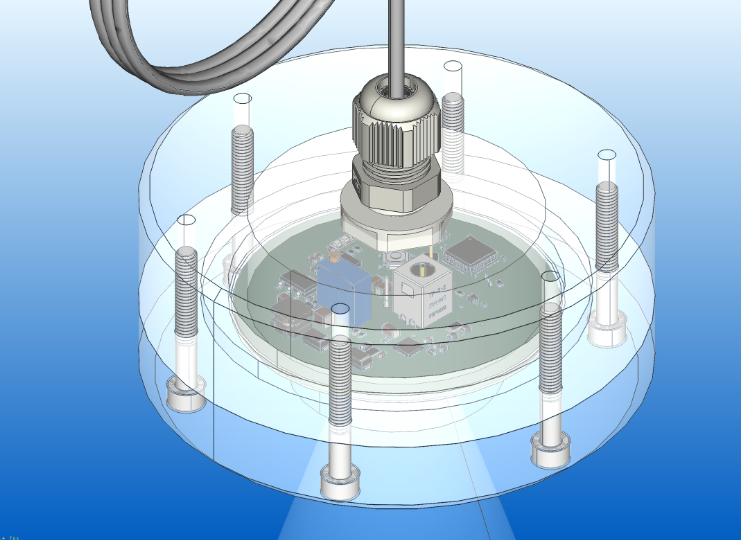
繼 TUSS4470 Arduino Shield之后,我正在開發一塊新的一體化電路板,將所有元件集成到一個組件中。該裝置可封裝在環氧樹脂、聚氨酯或硅膠中以防水,并通過 USB 連接到帶有基于 Python 的后臺和接口的計算機。這種設置可對采樣、驅動頻率、原始數據等進行全面的軟件控制。 
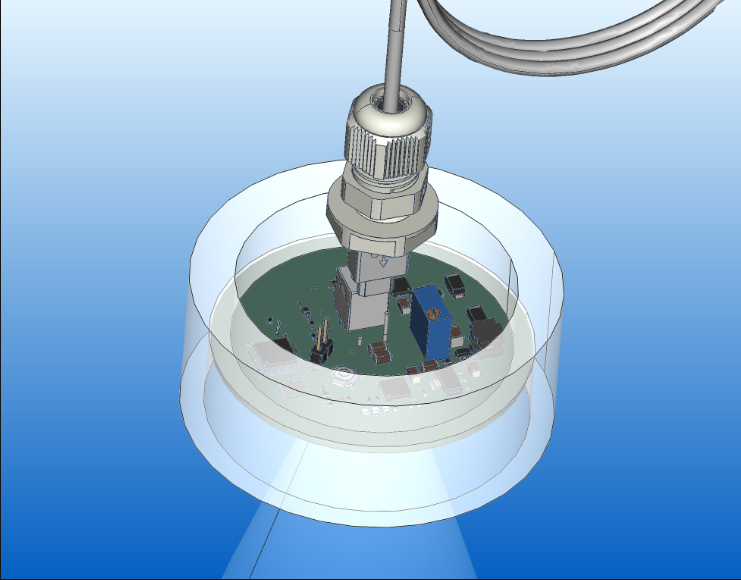
。外殼將由鋁或塑料經數控加工而成,內裝電子元件,以保護它們不受環境影響。19 毫米 200kHz 傳感器將采用聚氨酯或硅膠封裝,而有源表面將直接與水接觸。
 ?
?  水下潛水聲納
水下潛水聲納
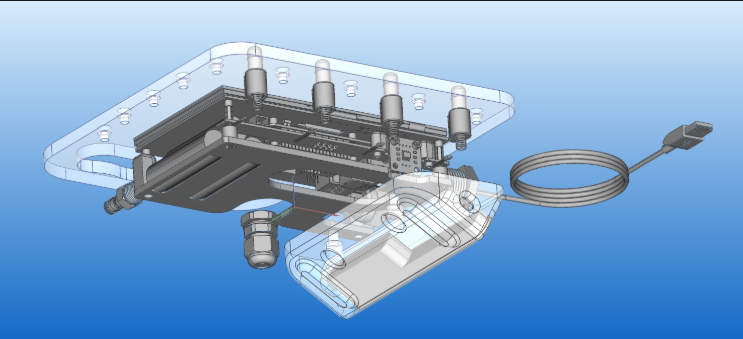
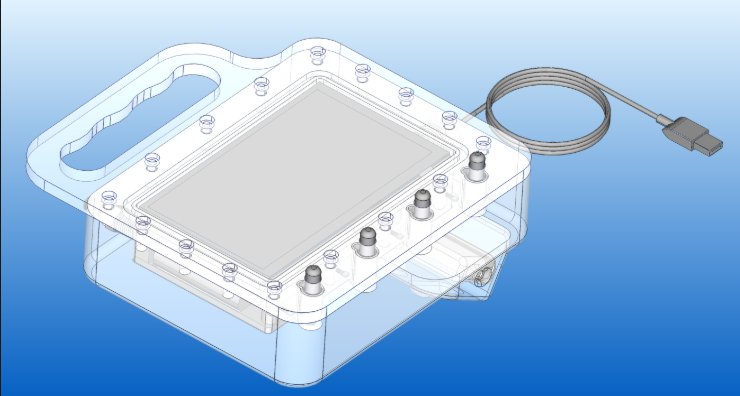
除了電子設計和 RAW 輸出回聲測深儀外,我還在開發一款帶聲納的潛水計算機。它基于一個 Raspberry Pi + 7" 顯示器、一個 IMU 和 KOGGER Basic Sidescan。我的第一個想法是將 KOGGER Basic 側掃聲納安裝上去。這很可能是獲得良好水下聲納圖像的最簡單方法。也許以后我會自己制作一個 FAN 聲納,安裝在潛水電腦上。但我們還是一件事、一件事慢慢來......
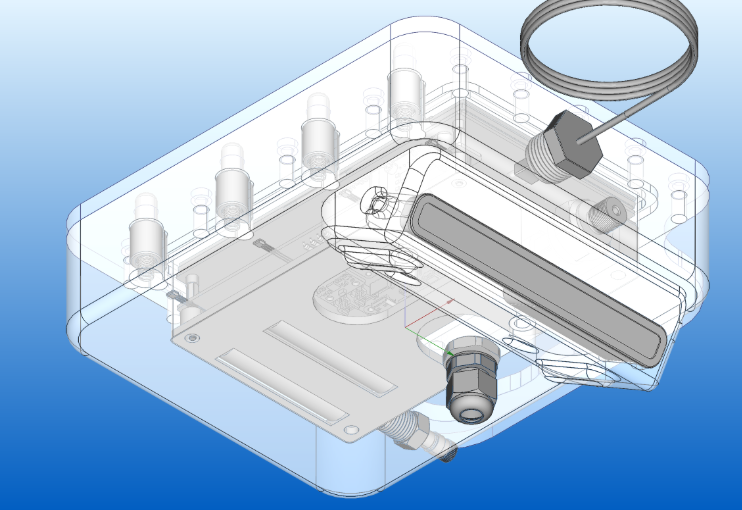
FAN/Sidescan SONAR 傳感器與陀螺儀傳感器和 Raspberry Pi 結合使用,可以顯示前方地面或沉船等障礙物的掃描圖像。
外殼由 50 毫米厚的聚乙烯塊加工而成。箱蓋采用 PMMA 材料密封,箱體采用 5 毫米 O 形環密封。內部使用潛水罐中的干燥空氣進行加壓,以防止水滲入,對密封件進行預壓,并檢查是否有泄漏(同時防止內部結露)。
四個帶磁鐵的按鈕與內部的霍爾效應傳感器相互作用,這些傳感器位于 RPi 的載板上。其余部分用于電池管理、一個磁性旋轉編碼器、壓力傳感器的 ADC 和一個使用 1/2 英寸水管蓋的防水 USB 連接器。
我在水中測試了幾次 KOGGER BASIC 側掃儀,分辨率和范圍都非常不錯。(不過,我還需要做更多的測試,并編寫使用陀螺儀數據的軟件,使其成為一個掃描側掃聲納。
最后...
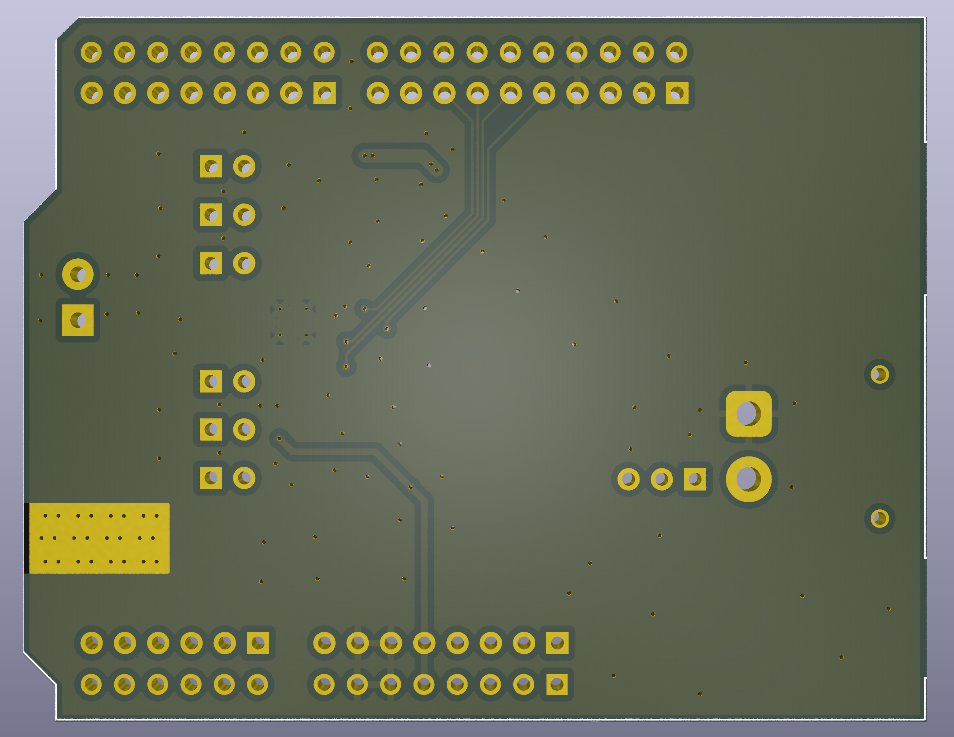
讓我們看一下第二代基于 TUSS4470 的 Shield 原理圖、PCB 和 測量過程中的一些實體圖片:
注意:如果想第一時間收到 KiCad 內容推送,請點擊下方的名片,按關注,再設為星標。
常用合集匯總:
和 Dr Peter 一起學 KiCad
KiCad 8 探秘合集
KiCad 使用經驗分享
KiCad 設計項目(Made with KiCad)
常見問題與解決方法
KiCad 開發筆記
插件應用
發布記錄
審核編輯 黃宇
-
開源
+關注
關注
3文章
3492瀏覽量
43046 -
Arduino
+關注
關注
188文章
6481瀏覽量
189010
發布評論請先 登錄
相關推薦
《電子發燒友電子設計周報》聚焦硬科技領域核心價值 第4期:2025.03.17--2025.03.21
開源項目!Open Echo:一個開源的聲納項目
FPGA標準庫Open Logic介紹

開源項目!教你如何制作一個開源教育機械臂
ElfBoard開源項目|智能消防車項目

開源鴻蒙榮獲開放原子“2024年度操作系統領域國內活躍開源項目”
開放原子開源基金會與三個開源項目舉行捐贈簽約儀式
凌蒙派OpenHarmony開源項目榮獲本期Gitee官方推薦

科技云報到:假開源真噱頭?開源大模型和你想的不一樣!
全球首個開源AI標準正式發布
ElfBoard開源項目|“智慧光伏”開源項目技術文檔





 工商網監
工商網監

評論