

Pico PIO狀態(tài)機(jī)實現(xiàn)外設(shè):CAN - 示例1
Pico擁有一組PIO協(xié)處理器。它們是實時控制器,能夠以確定的時序執(zhí)行邏輯。非常適合運行嚴(yán)格定時的序列和狀態(tài)機(jī),以及實現(xiàn)額外的外設(shè)(如這里的CAN)。序列和狀態(tài)機(jī),以及實現(xiàn)額外的外設(shè)(如這里的CAN)。
PIO引擎不易編程,也不易學(xué)習(xí)。但有一些很好的示例可供參考。我正在復(fù)習(xí)Kevin O'Connor精彩的can2040庫。
在這篇文章中:我將創(chuàng)建一個測試平臺,并證明我可以接收CAN通信。
這篇博客的目的不是編寫PIO(可編程輸入輸出)開發(fā)者教程。我試圖回溯開發(fā)者如何使用PIO指令實現(xiàn)一個標(biāo)準(zhǔn)協(xié)議。我使用的工具包括C語言、CMake、VSCode和Pico C SDK。預(yù)期的技能水平是:你能夠構(gòu)建和運行官方的pico-examples。
在通常情況下(這里跳過OSI模型),CAN(控制器局域網(wǎng))有兩層:
邏輯層:TTL、5V、3.3V等數(shù)字信號,由一些智能元件實現(xiàn),如外設(shè)、控制器位操作,本例中為PIO狀態(tài)機(jī)。
總線層:物理層,通常通過驅(qū)動器/收發(fā)器IC實現(xiàn)。我將在這里使用一個物理驅(qū)動器IC,這是我自己設(shè)計的一個小東西,我經(jīng)常使用。你也可以僅使用普通電阻和二極管制作一個簡易的CAN驅(qū)動器。
作為通信對等體,我使用另外兩個具備CAN能力的設(shè)備:一個帶有CAN外設(shè)的衍生設(shè)備和一個Microchip CAN總線分析儀。一個帶有CAN屏蔽板的Arduino(MKR)同樣適用。
這篇文章不深入代碼。它只是一個測試平臺,讓我看看是否能建立一個CAN通信。
獲取can2040庫
從Kevin的Kevin's github克隆或下載源代碼。
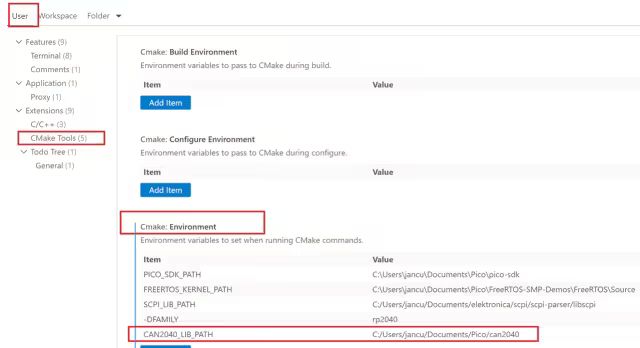
設(shè)置一個環(huán)境變量指向這個位置。這將確保我們可以創(chuàng)建一個不依賴于你存放第三方代碼位置的make腳本。我使用的是VSCode,并將在那里定義環(huán)境變量。你也可以在你的操作系統(tǒng)設(shè)置、shell腳本等中設(shè)置。
項目文件夾
我創(chuàng)建了一個包含CMake文件和src文件夾的目錄,src文件夾包含了一個非常簡單的測試文件(從這里獲取的,但我在項目中引用了can2040源代碼而不是導(dǎo)入它們)。
src/main.c
// source: https://gitea.predevolution-technologies.de/anme/CAN2040_Test
#include #include #include "pico/stdlib.h"#include "pico/binary_info.h"#include "hardware/irq.h"#include "can2040.h"#include "RP2040.h"
static struct can2040 cbus;
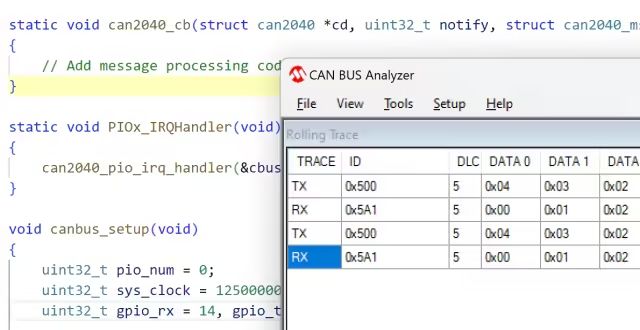
static void can2040_cb(struct can2040 *cd, uint32_t notify, struct can2040_msg *msg){ // Add message processing code here...}
static void PIOx_IRQHandler(void){ can2040_pio_irq_handler(&cbus);}
void canbus_setup(void){ uint32_t pio_num = 0; uint32_t sys_clock = 125000000, bitrate = 125000; uint32_t gpio_rx = 14, gpio_tx = 15;
// Setup canbus can2040_setup(&cbus, pio_num); can2040_callback_config(&cbus, can2040_cb);
// Enable irqs irq_set_exclusive_handler(PIO0_IRQ_0_IRQn, PIOx_IRQHandler); NVIC_SetPriority(PIO0_IRQ_0_IRQn, 1); NVIC_EnableIRQ(PIO0_IRQ_0_IRQn);
// Start canbus can2040_start(&cbus, sys_clock, bitrate, gpio_rx, gpio_tx);}
int main(void){
const uint LED_PIN = PICO_DEFAULT_LED_PIN; gpio_init(LED_PIN); gpio_set_dir(LED_PIN, GPIO_OUT); int32_t ledState = 0; stdio_init_all(); canbus_setup();
while(1){ printf("bla\n"); gpio_put(LED_PIN, ledState); if (ledState == 0){ ledState = 1; } else{ ledState = 0; } sleep_ms(1000); }}
./CMakeList.txt
cmake_minimum_required(VERSION 3.13)
# Pull in SDK (must be before project)include(pico_sdk_import.cmake)
project(can2040_project0 C CXX ASM)set(CMAKE_C_STANDARD 11)set(CMAKE_CXX_STANDARD 17)
#I've set this to allow breakpoints on any source lineset(PICO_DEOPTIMIZED_DEBUG=1)
pico_sdk_init()
add_executable(can2040_project0 source/main.c $ENV{CAN2040_LIB_PATH}/src/can2040.c )
target_include_directories(can2040_project0 PRIVATE ${CMAKE_CURRENT_LIST_DIR}/source $ENV{CAN2040_LIB_PATH}/src )
target_link_libraries(can2040_project0 pico_stdlib cmsis_core)
pico_add_extra_outputs(can2040_project0)
側(cè)邊欄:Pico PIO和其他預(yù)測性、時間關(guān)鍵型協(xié)處理器
Pico PIO狀態(tài)機(jī)是小型協(xié)控制器,它們以可預(yù)測的速度執(zhí)行每條指令。這類控制器從不會被中斷,不會監(jiān)聽中斷(但可以觸發(fā)中斷)。它們只是可靠地時鐘同步并執(zhí)行它們的小程序。通常,它們可以快速訪問一些GIO引腳。
還有其他一些控制器和處理器具有類似的功能:TI(德州儀器)的Hercules微控制器具有高端定時器。它與Pico PIO引擎非常相似,但Hercules指令額外支持角度、相位等(這些是用于多相電源和電機(jī)驅(qū)動的功能)。(同樣來自TI的)BeagleBone具有PRU(可編程實時單元),這也與Pico PIO引擎的功能非常接近。PRU可以直接訪問內(nèi)存和DMA引擎。這三者共同的特點是,它們不僅能夠產(chǎn)生精確定時的信號,還能夠采樣輸入信號。并且它們是超靈活的定時器,可以處理計數(shù)、相位移動、正交編碼等功能。
測試
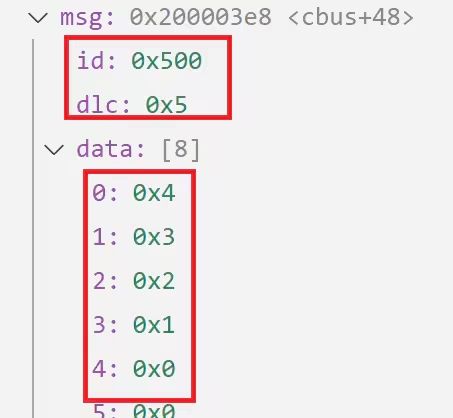
我啟動了一個調(diào)試會話,在can2040_cb()回調(diào)函數(shù)處設(shè)置了斷點。然后,從我的另一臺設(shè)備發(fā)送了一條CAN消息:

RP2040在斷點處停止,我可以看到消息ID、DLC(長度)和有效載荷:
我附上了我的VSCode項目的ZIP文件。別忘了下載can2040源代碼并設(shè)置環(huán)境變量。
-
CAN
+關(guān)注
關(guān)注
57文章
2806瀏覽量
465539 -
Pico
+關(guān)注
關(guān)注
0文章
179瀏覽量
17325 -
樹莓派
+關(guān)注
關(guān)注
118文章
1871瀏覽量
106235
發(fā)布評論請先 登錄
相關(guān)推薦
樹莓派pico入門學(xué)習(xí)筆記(一)相關(guān)資料推薦
樹莓派Pico的相關(guān)資料分享
使用樹莓派Pico開發(fā)板的一些思考與應(yīng)用實踐資料分享
樹莓派Pico的相關(guān)資料推薦
樹莓派也出MCU了?樹莓派Pico來了!

樹莓派Pico開發(fā)板硬件擴(kuò)展接口及電源模塊解析
樹莓派Pico:僅4美元的MCU
樹莓派pico入門學(xué)習(xí)筆記(一)
基于樹莓派pico的可編程游戲手柄設(shè)計
如何在樹莓派Pico上使用紅外線接收模塊?
樹莓派 Pico 2040 的“速度狂飆”:時鐘速度幾乎翻倍!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論