

北京貞光科技有限公司作為紫光同芯授權(quán)代理商,專注于為客戶提供車規(guī)級(jí)安全芯片的硬件供應(yīng)與軟件SDK一站式解決方案,同時(shí)配備專業(yè)技術(shù)團(tuán)隊(duì),為選型及定制需求提供現(xiàn)場(chǎng)指導(dǎo)與支持。
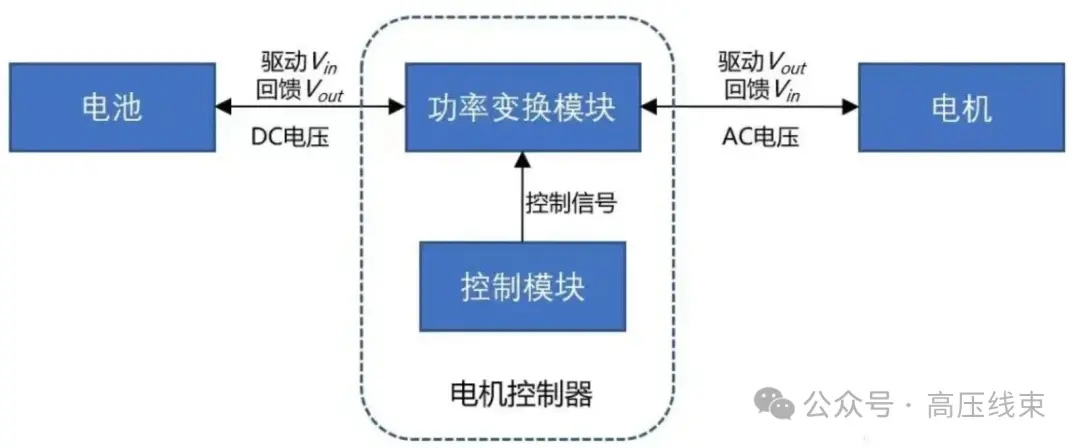
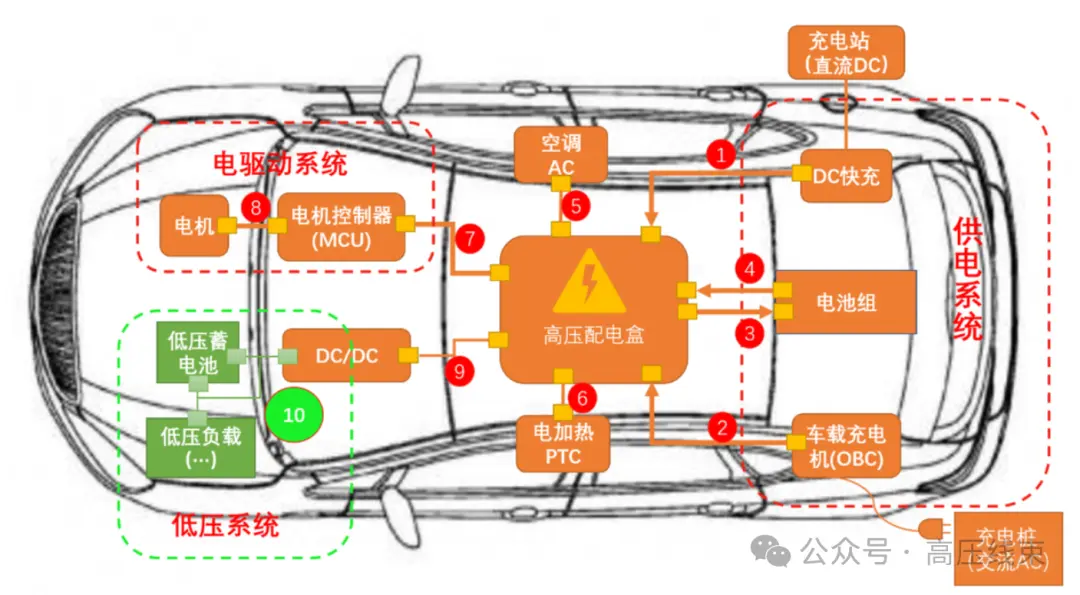
“ 新能源汽車的動(dòng)力電池輸出的是直流電,而驅(qū)動(dòng)車輛行駛的電機(jī)卻需要交流電才能正常運(yùn)轉(zhuǎn)。這時(shí)候,MCU 就發(fā)揮了關(guān)鍵作用,它能夠?qū)?dòng)力電池輸出的直流電,通過一系列復(fù)雜而精妙的電路轉(zhuǎn)換和控制技術(shù),完美地轉(zhuǎn)化為高壓交流電,源源不斷地輸送給電機(jī),驅(qū)動(dòng)電機(jī)本體輸出強(qiáng)勁的機(jī)械能,讓汽車得以在道路上自由馳騁。”
目錄:
1 MCU的組成與作用
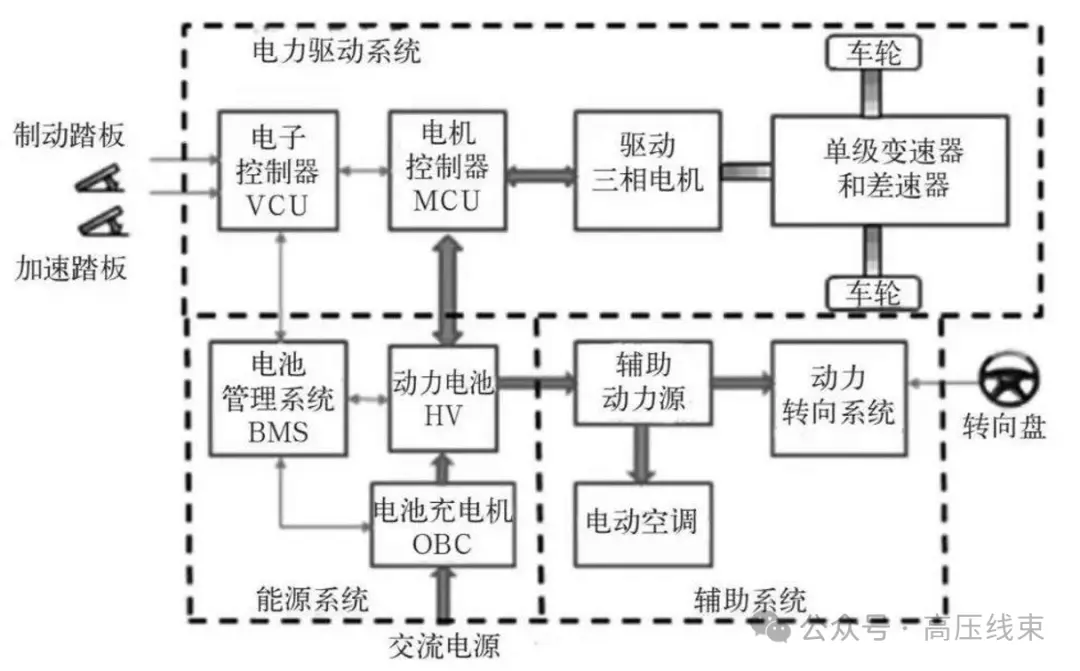
驅(qū)動(dòng)電機(jī)是新能源汽車的三大件之一,它決定了新能源汽車的 負(fù)載 能力、 加速 能力、 爬坡 能力和 最高 車速,是新能源汽車獲得前進(jìn) 動(dòng)力 的核心部件,同時(shí)也在一定程度上影響了汽車的整車能耗和續(xù)駛里程。
電機(jī)控制器 MCU (MotorControl Unit)是 電機(jī)的中央 控制樞紐 ,通過控制算法和策略執(zhí)行多項(xiàng)重要功能,目標(biāo)是 使電機(jī)的性能發(fā)揮到最佳狀態(tài), 以確保平穩(wěn)高效的駕駛。
1.1 MCU的組成部分
MCU由硬件和軟件兩大部分協(xié)同構(gòu)成,各自發(fā)揮著獨(dú)特而關(guān)鍵的作用,共同保障新能源汽車的高效穩(wěn)定運(yùn)行。
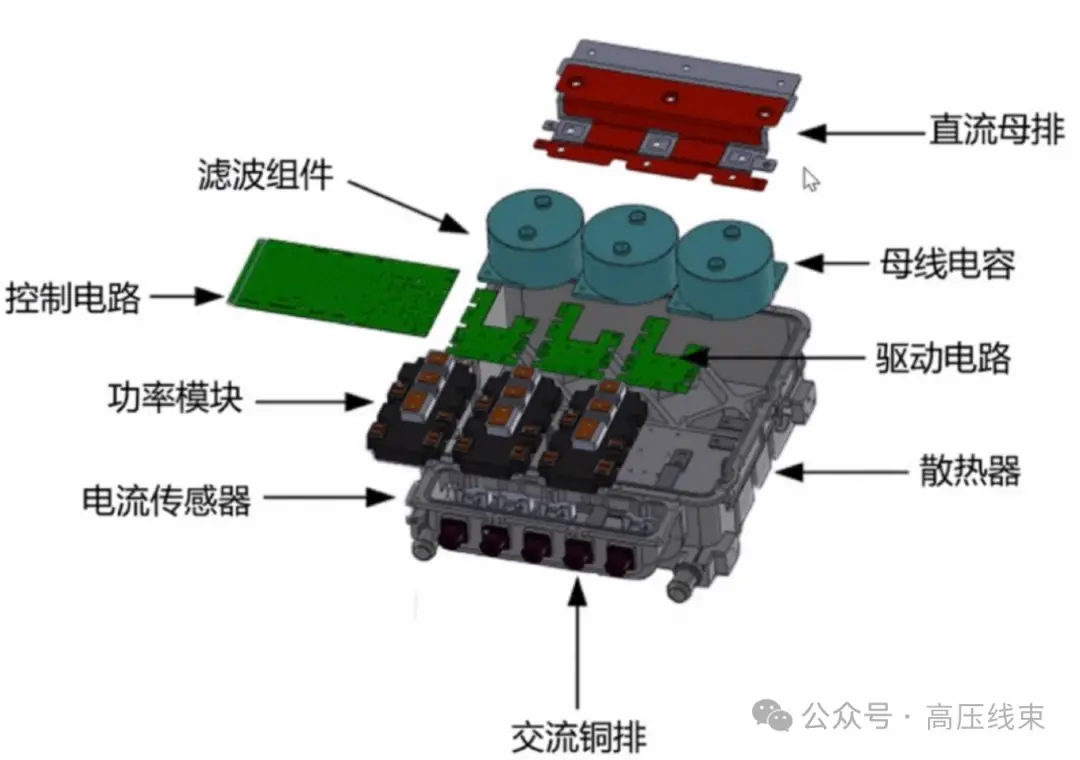
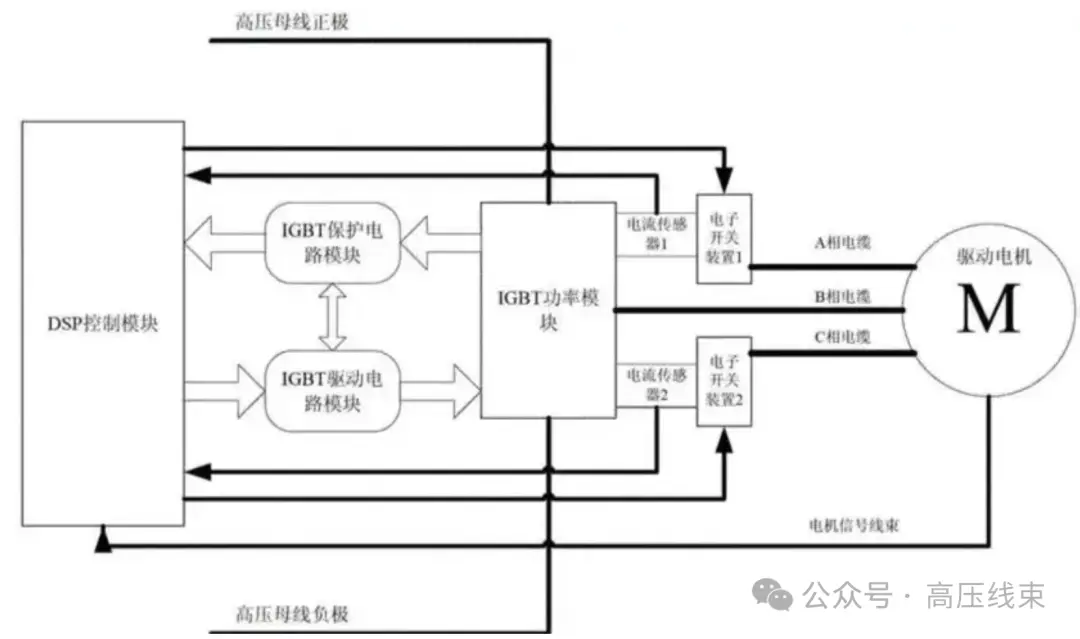
硬件部分是 MCU 的物理基礎(chǔ),其各個(gè)部分共同完成電能轉(zhuǎn)換和控制信號(hào)處理的任務(wù)。電機(jī)控制器的主體部分包括直流母排、濾波組件、母線電容、控制電路、功率模塊、散熱器、驅(qū)動(dòng)電路、電流傳感器和交流銅排等。

軟件部分全面負(fù)責(zé)整個(gè)系統(tǒng)的運(yùn)行邏輯和控制策略制定。它能夠敏銳地接收來自車輛控制單元(VCU)或操作界面的指令,精準(zhǔn)實(shí)現(xiàn)電機(jī)的啟動(dòng)、停止、調(diào)速、換向等一系列復(fù)雜控制功能。通過運(yùn)行先進(jìn)的控制算法,如矢量控制、直接轉(zhuǎn)矩控制等,控制電路能夠?qū)崿F(xiàn)高效、精確的電機(jī)驅(qū)動(dòng),使電機(jī)的運(yùn)行更加平穩(wěn)、高效。
在系統(tǒng)運(yùn)行過程中,控制電路還會(huì)持續(xù)監(jiān)測(cè)系統(tǒng)狀態(tài),密切關(guān)注電壓、電流、溫度等關(guān)鍵參數(shù),并及時(shí)進(jìn)行故障診斷和保護(hù)。一旦檢測(cè)到異常情況,它能迅速采取相應(yīng)措施,如報(bào)警、切斷電路等,有效避免故障擴(kuò)大,保障系統(tǒng)安全。以特斯拉為例,其 MCU 的軟件系統(tǒng)不斷優(yōu)化升級(jí),通過對(duì)電機(jī)的精準(zhǔn)控制,不僅提升了車輛的動(dòng)力性能和續(xù)航里程,還增強(qiáng)了車輛的安全性和穩(wěn)定性 。
1.2 MCU的功能與作用
控制算法執(zhí)行
MCU 能夠執(zhí)行多種復(fù)雜而精妙的控制算法,以實(shí)現(xiàn)對(duì)電機(jī)的高效、精準(zhǔn)控制,讓電機(jī)始終保持在最佳的運(yùn)行狀態(tài)。
在眾多控制算法中,PID 控制算法堪稱經(jīng)典中的經(jīng)典,通過對(duì)電機(jī)的轉(zhuǎn)速、扭矩、電流等運(yùn)行參數(shù)進(jìn)行實(shí)時(shí)、嚴(yán)密的監(jiān)測(cè),不斷地將這些實(shí)際運(yùn)行參數(shù)與預(yù)先設(shè)定的目標(biāo)值進(jìn)行細(xì)致比對(duì)。一旦發(fā)現(xiàn)兩者之間存在偏差,PID 控制算法就會(huì)迅速發(fā)揮作用,依據(jù)比例(P、Proportion)、積分(I、Integral)、微分(D、Derivative)這三個(gè)關(guān)鍵環(huán)節(jié),對(duì)電機(jī)的輸入信號(hào)進(jìn)行動(dòng)態(tài)、精準(zhǔn)的調(diào)整。
電機(jī)驅(qū)動(dòng)
MCU 在電機(jī)驅(qū)動(dòng)方面扮演著至關(guān)重要的角色,它能精準(zhǔn)地控制著電機(jī)驅(qū)動(dòng)電路,實(shí)現(xiàn)電機(jī)的啟動(dòng)、停止、正反轉(zhuǎn)和調(diào)速等一系列關(guān)鍵功能,為新能源汽車的穩(wěn)定運(yùn)行提供了堅(jiān)實(shí)保障 。
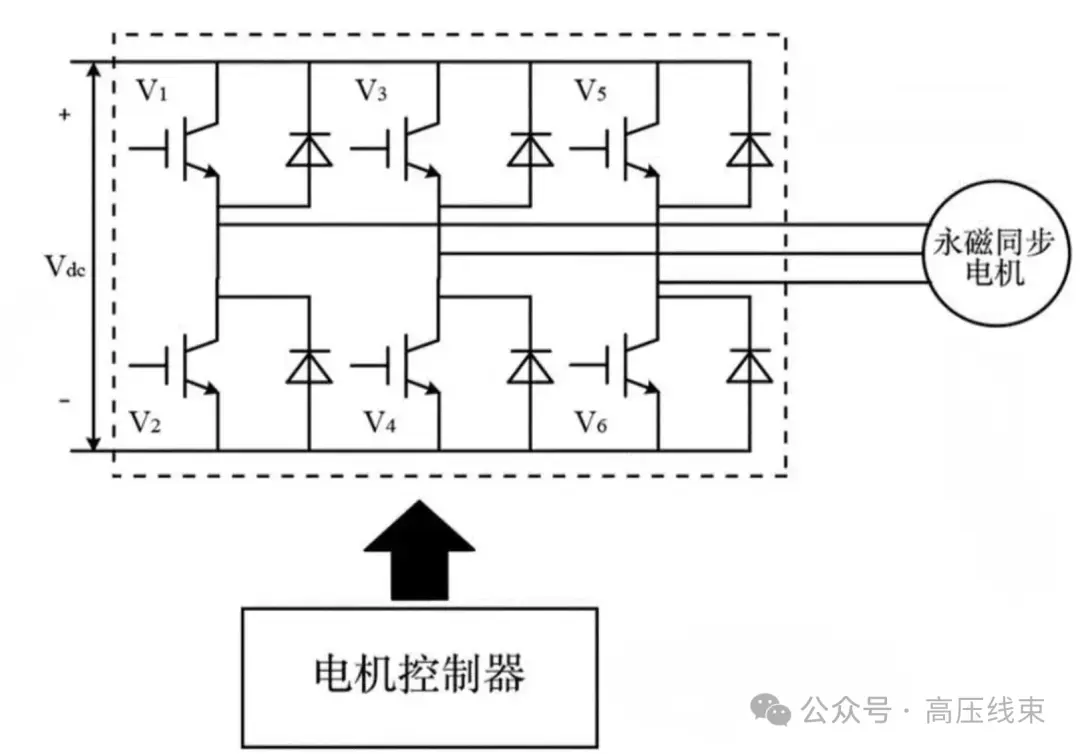
當(dāng)我們啟動(dòng)新能源汽車時(shí),MCU 會(huì)迅速發(fā)出啟動(dòng)指令,通過驅(qū)動(dòng)電路將控制信號(hào)傳遞給電機(jī)的功率模塊。功率模塊中的 IGBT 等功率器件在接收到信號(hào)后,按照特定的順序和時(shí)間間隔依次導(dǎo)通和關(guān)斷,將動(dòng)力電池輸出的直流電巧妙地轉(zhuǎn)換為三相交流電,并輸送給電機(jī)。電機(jī)在三相交流電的驅(qū)動(dòng)下,開始旋轉(zhuǎn),帶動(dòng)車輛平穩(wěn)起步。
在車輛行駛過程中,MCU 會(huì)根據(jù)駕駛員的操作意圖和車輛的行駛狀態(tài),實(shí)時(shí)調(diào)整電機(jī)的轉(zhuǎn)速和扭矩。當(dāng)駕駛員踩下加速踏板時(shí),MCU 會(huì)接收到加速信號(hào),它會(huì)立即增加 PWM 信號(hào)的脈沖寬度,使電機(jī)的輸入電壓升高,從而提高電機(jī)的轉(zhuǎn)速和扭矩,實(shí)現(xiàn)車輛的加速;反之,當(dāng)駕駛員松開加速踏板或踩下制動(dòng)踏板時(shí),MCU 會(huì)減小 PWM 信號(hào)的脈沖寬度,降低電機(jī)的輸入電壓,使電機(jī)的轉(zhuǎn)速和扭矩降低,實(shí)現(xiàn)車輛的減速或制動(dòng) 。
如果駕駛員需要車輛倒車,MCU 則會(huì)改變功率模塊中 IGBT 的導(dǎo)通順序,從而改變?nèi)嘟涣麟姷南嘈颍闺姍C(jī)反轉(zhuǎn),實(shí)現(xiàn)車輛的倒車功能。
能量管理
MCU 時(shí)刻密切監(jiān)控著電池狀態(tài)和電機(jī)負(fù)載,通過智能的能量回收機(jī)制,實(shí)現(xiàn)對(duì)能量的優(yōu)化使用,有效提高車輛的續(xù)航里程 。
在車輛行駛過程中,MCU 會(huì)持續(xù)從 BMS 獲取電池的電壓、電流、溫度以及剩余電量等關(guān)鍵信息,同時(shí)實(shí)時(shí)監(jiān)測(cè)電機(jī)的運(yùn)行狀態(tài)和負(fù)載情況。當(dāng)車輛處于制動(dòng)或減速狀態(tài)時(shí),MCU 會(huì)迅速捕捉到這一信號(hào),并立即啟動(dòng)能量回收程序。此時(shí),電機(jī)不再作為動(dòng)力輸出裝置,而是搖身一變成為一臺(tái)發(fā)電機(jī),將車輛的動(dòng)能轉(zhuǎn)化為電能 。
MCU 通過精確控制電機(jī)的發(fā)電狀態(tài),將產(chǎn)生的電能高效地回饋給電池進(jìn)行儲(chǔ)存。在這個(gè)過程中,MCU 會(huì)根據(jù)電池的實(shí)時(shí)狀態(tài),合理調(diào)整能量回收的強(qiáng)度和功率,確保電池能夠安全、穩(wěn)定地接受回饋的電能。如果電池電量已經(jīng)接近飽和,MCU 會(huì)適當(dāng)降低能量回收的強(qiáng)度,避免電池過充;反之,如果電池電量較低,MCU 則會(huì)提高能量回收的效率,盡可能多地將動(dòng)能轉(zhuǎn)化為電能儲(chǔ)存起來。
故障診斷與保護(hù)
MCU 實(shí)時(shí)監(jiān)測(cè)電機(jī)及其驅(qū)動(dòng)系統(tǒng)的工作狀態(tài),能夠及時(shí)、敏銳地發(fā)現(xiàn)任何異常情況,并迅速采取一系列有效的保護(hù)措施,全力確保電機(jī)和整個(gè)驅(qū)動(dòng)系統(tǒng)的安全穩(wěn)定運(yùn)行 。
在車輛行駛過程中,MCU 會(huì)不斷地從各個(gè)傳感器獲取電機(jī)的轉(zhuǎn)速、電流、溫度、位置等關(guān)鍵數(shù)據(jù),并依據(jù)這些數(shù)據(jù)對(duì)電機(jī)的運(yùn)行狀態(tài)進(jìn)行全面、深入的分析和判斷。一旦檢測(cè)到電機(jī)的電流超過額定值,出現(xiàn)過載現(xiàn)象,MCU 會(huì)立即采取降低電機(jī)功率的措施,減少電流的輸出,避免電機(jī)因過熱而損壞。如果過載情況較為嚴(yán)重,MCU 會(huì)果斷切斷電機(jī)的電源,使電機(jī)停止運(yùn)行,以保護(hù)電機(jī)和其他相關(guān)部件不受損壞 。
當(dāng) MCU 監(jiān)測(cè)到電機(jī)的溫度過高時(shí),它會(huì)迅速啟動(dòng)散熱系統(tǒng),加大散熱力度,降低電機(jī)的溫度。散熱系統(tǒng)可能包括風(fēng)冷或水冷裝置,MCU 會(huì)根據(jù)溫度的具體情況,合理調(diào)整散熱風(fēng)扇的轉(zhuǎn)速或冷卻液的流量,確保電機(jī)始終在適宜的溫度范圍內(nèi)運(yùn)行。如果溫度持續(xù)升高且無法得到有效控制,MCU 會(huì)采取緊急措施,如降低電機(jī)功率或停止電機(jī)運(yùn)行,防止電機(jī)因過熱而燒毀 。
MCU 還具備對(duì)電機(jī)及其驅(qū)動(dòng)系統(tǒng)進(jìn)行短路保護(hù)、過壓保護(hù)、欠壓保護(hù)等多種保護(hù)功能。當(dāng)檢測(cè)到電路中出現(xiàn)短路故障時(shí),MCU 會(huì)在瞬間切斷電源,避免短路電流對(duì)電路元件造成損壞;當(dāng)電壓過高或過低時(shí),MCU 也會(huì)及時(shí)做出反應(yīng),采取相應(yīng)的措施,如調(diào)整電機(jī)的工作狀態(tài)或發(fā)出警報(bào)信號(hào),確保系統(tǒng)的正常運(yùn)行。
通訊與數(shù)據(jù)處理
MCU 作為新能源汽車電子控制系統(tǒng)中的重要一員,還是一位高效的 “信息交互官”,負(fù)責(zé)與其他電子控制單元(ECU)進(jìn)行密切、順暢的通訊,并對(duì)大量的數(shù)據(jù)進(jìn)行精準(zhǔn)、快速的收集和處理,為實(shí)現(xiàn)更復(fù)雜、智能的駕駛輔助功能奠定了堅(jiān)實(shí)基礎(chǔ) 。
在新能源汽車的電子電氣架構(gòu)中,各個(gè) ECU 就像是一個(gè)個(gè)獨(dú)立的 “小大腦”,它們分別負(fù)責(zé)車輛不同系統(tǒng)的控制和管理。而 MCU 則通過 CAN 總線、LIN 總線等通信網(wǎng)絡(luò),與整車控制器(VCU)、電池管理系統(tǒng)(BMS)、車身控制器(BCM)等其他 ECU 建立起緊密的聯(lián)系,實(shí)現(xiàn)信息的實(shí)時(shí)共享和交互 。
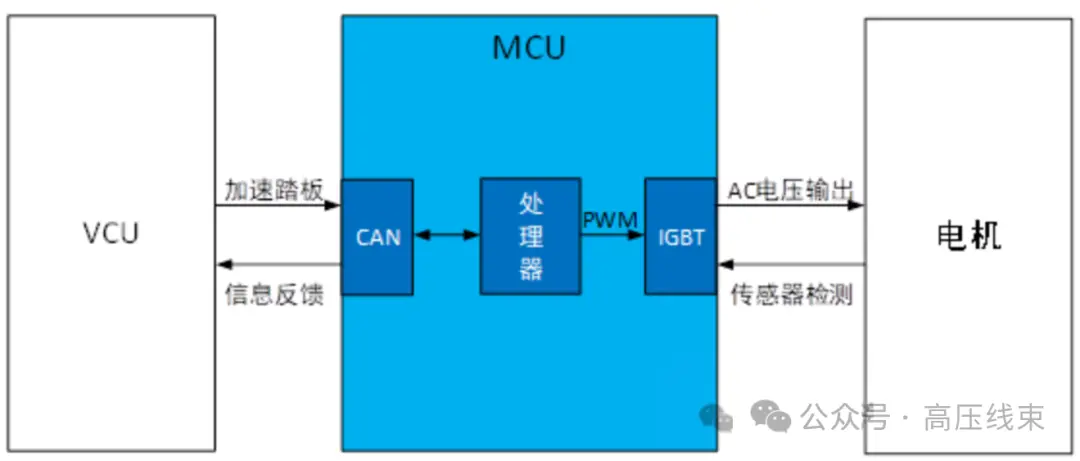
當(dāng)駕駛員操作車輛時(shí),VCU 會(huì)收集來自各種傳感器的信號(hào),如加速踏板位置、制動(dòng)踏板位置、方向盤轉(zhuǎn)角等,并對(duì)這些信號(hào)進(jìn)行分析和處理,然后將相應(yīng)的控制指令發(fā)送給 MCU。MCU 接收到指令后,會(huì)根據(jù)指令要求控制電機(jī)的運(yùn)行狀態(tài),同時(shí)將電機(jī)的實(shí)時(shí)運(yùn)行數(shù)據(jù)反饋給 VCU,以便 VCU 對(duì)整車的運(yùn)行狀態(tài)進(jìn)行全面監(jiān)控和調(diào)整 。
2 MCU 的工作原理
MCU 的工作原理可以簡(jiǎn)單理解為一個(gè)信息處理和指令執(zhí)行的循環(huán)過程,它通過不斷地采集電機(jī)的運(yùn)行數(shù)據(jù),依據(jù)預(yù)設(shè)的控制算法進(jìn)行分析決策,然后輸出相應(yīng)的控制信號(hào)來調(diào)節(jié)電機(jī)的運(yùn)行狀態(tài),確保電機(jī)能夠按照車輛的需求穩(wěn)定、高效地工作。
2.1 數(shù)據(jù)采集
在新能源汽車行駛過程中,MCU 借助各種高精度傳感器,實(shí)時(shí)收集電機(jī)的轉(zhuǎn)速、溫度、位置、扭矩等關(guān)鍵數(shù)據(jù)。
轉(zhuǎn)速傳感器運(yùn)用電磁感應(yīng)、霍爾效應(yīng)等先進(jìn)原理,精確測(cè)量電機(jī)的旋轉(zhuǎn)速度,并將這些數(shù)據(jù)源源不斷地傳輸給 MCU,讓 MCU 時(shí)刻掌握電機(jī)的運(yùn)轉(zhuǎn)快慢 。
溫度傳感器緊密貼合在電機(jī)的關(guān)鍵部位,實(shí)時(shí)感知電機(jī)的溫度變化,防止電機(jī)因過熱而出現(xiàn)故障,一旦溫度超出正常范圍,它會(huì)迅速向 MCU 發(fā)出警報(bào) 。
位置傳感器通過解析電機(jī)轉(zhuǎn)子的位置信息,幫助 MCU 確定電機(jī)的運(yùn)轉(zhuǎn)角度和位置,為后續(xù)的精確控制提供關(guān)鍵依據(jù)。
扭矩傳感器能夠準(zhǔn)確測(cè)量電機(jī)輸出的扭矩大小,使 MCU 清楚了解電機(jī)的動(dòng)力輸出情況,以便根據(jù)車輛的行駛需求,如加速、爬坡等,靈活調(diào)整電機(jī)的工作狀態(tài) 。
這些傳感器就像 MCU 的 “觸角”,為其提供了全面、準(zhǔn)確的電機(jī)運(yùn)行信息,是 MCU 實(shí)現(xiàn)精準(zhǔn)控制的重要基礎(chǔ)。
2.2 決策制定
當(dāng) MCU 收集到豐富的數(shù)據(jù)后,便會(huì)化身為一位睿智的 “決策大師”,依據(jù)預(yù)先設(shè)定的控制算法和策略,對(duì)這些數(shù)據(jù)進(jìn)行深入、細(xì)致的分析。
比如,在車輛加速時(shí),MCU 會(huì)根據(jù)加速踏板的位置信號(hào)以及電機(jī)的當(dāng)前轉(zhuǎn)速、扭矩等數(shù)據(jù),運(yùn)用先進(jìn)的矢量控制算法或直接轉(zhuǎn)矩控制算法,快速判斷電機(jī)需要輸出的扭矩和轉(zhuǎn)速,以實(shí)現(xiàn)平穩(wěn)、強(qiáng)勁的加速效果。矢量控制算法通過對(duì)電機(jī)的磁場(chǎng)和電流進(jìn)行精確控制,將交流電機(jī)模擬成直流電機(jī)進(jìn)行控制,大大提高了電機(jī)的控制精度和動(dòng)態(tài)性能;直接轉(zhuǎn)矩控制算法則直接對(duì)電機(jī)的轉(zhuǎn)矩和磁鏈進(jìn)行控制,響應(yīng)速度快,控制精度高。
在這個(gè)過程中,MCU 還會(huì)充分考慮車輛的行駛狀態(tài)、電池的電量和狀態(tài)等因素,綜合權(quán)衡后決定最佳的控制策略。當(dāng)電池電量較低時(shí),MCU 會(huì)適當(dāng)降低電機(jī)的功率輸出,以節(jié)省電量,延長(zhǎng)車輛的續(xù)航里程;當(dāng)車輛處于高速行駛狀態(tài)時(shí),MCU 會(huì)優(yōu)化電機(jī)的控制策略,降低電機(jī)的能耗,提高車輛的能效。通過這種精準(zhǔn)的決策制定,MCU 確保電機(jī)始終處于最佳的運(yùn)行狀態(tài),為車輛的高效、安全行駛提供有力保障。
2.3 控制信號(hào)輸出
在做出決策后,MCU 緊接著生成相應(yīng)的控制信號(hào),其中最常見的就是脈沖寬度調(diào)制(PWM)信號(hào)。PWM 信號(hào)就像是一串具有不同脈沖寬度的電信號(hào)序列,通過改變脈沖的寬度和頻率,MCU 可以精確控制電機(jī)驅(qū)動(dòng)電路中功率器件(如 IGBT)的開關(guān)狀態(tài)。
當(dāng) PWM 信號(hào)的脈沖寬度變寬時(shí),功率器件的導(dǎo)通時(shí)間變長(zhǎng),電機(jī)得到的平均電壓升高,從而輸出更大的扭矩和轉(zhuǎn)速;反之,當(dāng)脈沖寬度變窄時(shí),電機(jī)的輸出扭矩和轉(zhuǎn)速則會(huì)相應(yīng)降低。通過這種方式,MCU 實(shí)現(xiàn)了對(duì)電機(jī)輸出的精確控制,使電機(jī)能夠根據(jù)車輛的行駛需求,快速、準(zhǔn)確地做出響應(yīng)。
除了 PWM 信號(hào),MCU 還可能輸出其他類型的控制信號(hào),如方向控制信號(hào)、制動(dòng)控制信號(hào)等,以實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)、制動(dòng)等功能。這些控制信號(hào)通過驅(qū)動(dòng)電路進(jìn)行放大和隔離后,被傳輸?shù)诫姍C(jī)的各個(gè)繞組,從而驅(qū)動(dòng)電機(jī)按照 MCU 的指令運(yùn)行,為車輛提供穩(wěn)定、可靠的動(dòng)力支持 。
2.4 反饋調(diào)整
MCU 的工作過程并非是一個(gè)單向的控制過程,它還具備強(qiáng)大的 “自我調(diào)節(jié)” 能力,通過實(shí)時(shí)監(jiān)測(cè)電機(jī)的運(yùn)行狀態(tài),并與設(shè)定的目標(biāo)值進(jìn)行對(duì)比,根據(jù)偏差及時(shí)調(diào)整控制信號(hào),實(shí)現(xiàn)對(duì)電機(jī)的精準(zhǔn)控制,這就是反饋調(diào)整機(jī)制。
以車輛在行駛過程中的速度控制為例,MCU 會(huì)不斷地從轉(zhuǎn)速傳感器獲取電機(jī)的實(shí)際轉(zhuǎn)速數(shù)據(jù),并將其與駕駛員設(shè)定的目標(biāo)速度進(jìn)行比較。如果實(shí)際轉(zhuǎn)速低于目標(biāo)速度,MCU 會(huì)自動(dòng)增加 PWM 信號(hào)的脈沖寬度,提高電機(jī)的輸出扭矩和轉(zhuǎn)速,使車輛加速;反之,如果實(shí)際轉(zhuǎn)速高于目標(biāo)速度,MCU 則會(huì)減小脈沖寬度,降低電機(jī)的輸出,使車輛減速。通過這種不斷的反饋和調(diào)整,MCU 能夠確保車輛始終保持在設(shè)定的速度范圍內(nèi)行駛,為駕駛者提供穩(wěn)定、舒適的駕駛體驗(yàn) 。
反饋調(diào)整機(jī)制還能有效應(yīng)對(duì)各種復(fù)雜的行駛工況和外界干擾。當(dāng)車輛爬坡時(shí),電機(jī)需要輸出更大的扭矩來克服重力,MCU 會(huì)根據(jù)扭矩傳感器反饋的信息,及時(shí)調(diào)整控制信號(hào),增加電機(jī)的扭矩輸出;當(dāng)車輛遇到顛簸路面或其他突發(fā)情況時(shí),MCU 也能迅速做出反應(yīng),調(diào)整電機(jī)的工作狀態(tài),保證車輛的行駛穩(wěn)定性和安全性。這種閉環(huán)控制方式使得 MCU 能夠?qū)崟r(shí)適應(yīng)不同的工作條件,確保電機(jī)始終處于最佳的運(yùn)行狀態(tài),大大提高了新能源汽車的性能和可靠性。
3 總結(jié)
在新能源汽車的技術(shù)體系中,電機(jī)控制器 MCU 以其獨(dú)特的功能和卓越的性能,成為新能源汽車發(fā)展的核心驅(qū)動(dòng)力。從精確的電機(jī)控制算法執(zhí)行,到高效的電機(jī)驅(qū)動(dòng),再到智能的能量管理和可靠的故障診斷保護(hù),以及順暢的通訊與數(shù)據(jù)處理,MCU 全方位地保障了新能源汽車的安全、高效運(yùn)行,為駕駛者帶來了前所未有的駕駛體驗(yàn) 。
未來,隨著人工智能、物聯(lián)網(wǎng)、大數(shù)據(jù)等新興技術(shù)的不斷融合與創(chuàng)新,MCU 有望在性能、功能和應(yīng)用場(chǎng)景等方面實(shí)現(xiàn)更大的突破 。我們有理由相信,在 MCU 技術(shù)的有力支撐下,新能源汽車將迎來更加輝煌的發(fā)展前景,為全球綠色出行和可持續(xù)發(fā)展做出更大的貢獻(xiàn) 。
免責(zé)聲明:分享此文僅為傳播行業(yè)相關(guān)知識(shí),其版權(quán)歸原作者所有;若有侵權(quán)異議等請(qǐng)聯(lián)系協(xié)商或刪除,謝謝!
-
微控制器
+關(guān)注
關(guān)注
48文章
7872瀏覽量
153471 -
新能源汽車
+關(guān)注
關(guān)注
141文章
10848瀏覽量
101176 -
mcu
+關(guān)注
關(guān)注
146文章
17751瀏覽量
358753 -
車規(guī)級(jí)芯片
+關(guān)注
關(guān)注
2文章
254瀏覽量
12555 -
車規(guī)MCU
+關(guān)注
關(guān)注
0文章
71瀏覽量
1281
發(fā)布評(píng)論請(qǐng)先 登錄
新能源汽車動(dòng)力系統(tǒng)設(shè)計(jì)資料精華
新能源汽車有哪些用電機(jī)及其控制器電磁兼容性測(cè)試的方法?
新能源汽車MCU常用的參數(shù)
新能源汽車電池銅排軟連接(T2)
圓柱電池回收,軟包電池回收,鋁殼電池回收,動(dòng)力電池回收,新能源汽車電池回收,新能源汽車回收
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
回收新能源汽車 回收電動(dòng)汽車 回收新能源汽車電池 回收電動(dòng)汽車電池 ,動(dòng)力電芯回收企業(yè) 18650電池回收企業(yè)
回收新能源汽車電池包,回收新能源汽車電池 , 回收新能源汽車,18650電池組回收
回收新能源汽車,回收電動(dòng)汽車,回收新能源汽車電池模組,回收新能源汽車電機(jī), 回收新能源汽車軟包電池組
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
回收新能源汽車電池包,回收新能源汽車電池 回收新能源汽車18650電池組 回收新能源汽車軟包電池組
新能源汽車核心技術(shù):VCU整車控制器、MCU電機(jī)控制器、BMS電池管理系統(tǒng)

新能源汽車控制器詳解:VCU、ECU、MCU和電池BMS





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論