") 基于毫米波雷達(dá)和機(jī)器視覺的夜間前方車輛檢測方案
基于毫米波雷達(dá)和機(jī)器視覺的夜間前方車輛檢測方案
為研究夜間追尾事故中本車智能防撞預(yù)警方法,本文提出了一種基于毫米波雷達(dá)和機(jī)器視覺的前方車輛檢測方法。利用多傳感器融合數(shù)據(jù),檢測前方車輛的距離、速度等。建立傳感器之間轉(zhuǎn)換關(guān)系,轉(zhuǎn)換雷達(dá)目標(biāo)的世界坐標(biāo)到圖像坐標(biāo)。
在圖像上形成感興趣區(qū)域,利用圖像處理方法減少干擾點,運用 Dempster-Shafer(D-S)證據(jù)理論,融合特征信息,得到總的信任度值檢驗感興趣區(qū)域內(nèi)的車輛。實驗采集多段夜間道路行車視頻數(shù)據(jù),統(tǒng)計實現(xiàn)尾燈識別的幀數(shù),與主觀判斷進(jìn)行比較。結(jié)果表明:該方法能夠?qū)崿F(xiàn)對夜間前方車輛的檢測和定位。
本文來自 2016 年 6 月 15 日出版的《 汽車安全與節(jié)能學(xué)報 》,作者是吉林大學(xué)交通學(xué)院的金立生教授和程蕾以及清華大學(xué)汽車安全與節(jié)能國家重點實驗室的成波教授。
道路交通事故中由追尾相撞導(dǎo)致的事故占很大比例,而夜間交通事故尤為嚴(yán)重,約占交通事故總數(shù)的 40%。夜間車輛檢測技術(shù)已成為智能車輛安全輔助駕駛系統(tǒng)的重要組成部分,用于準(zhǔn)確地識別夜間前方車輛,為駕駛員及時提供前方車輛信息及路況,降低夜間交通事故的發(fā)生 [1]。
夜間由于光線強(qiáng)度不夠,大部分白天的車輛特征信息已經(jīng)不可用,因此用于白天的車輛檢測算法基本失效。車輛尾燈是夜間車輛的明顯特征,目前,對于夜間前方車輛檢測識別的研究主要是利用單目視覺傳感器,獲取車輛前方的視覺感知信息,基于圖像信息提取尾燈特征進(jìn)行前方車輛識別。
劉尊洋等人結(jié)合車輛尾燈的顏色與亮度檢測尾燈 [2];吳海濤等人對前車燈對配對進(jìn)行車輛的跟蹤 [3];唐佳林等人采用幀差法提取感興趣區(qū)域 [4];王孝蘭選擇基于模糊理論的分割方法對圖像進(jìn)行分割,提取車牌、尾燈的特征 [5];祁秋紅等人通過色調(diào)(hue)-飽和度(saturation)-明度(value)的顏色模型(HSV)對尾燈的顏色信息進(jìn)行分割,辨出車輛位置[6];周俊杰采用基于R通道直方圖的紅(red)-綠(green)-藍(lán)(blue)彩色(RGB)空間自適應(yīng)閾值分割圖像,自適應(yīng)效果不是很理想 [7]。
機(jī)器視覺是一種用于車輛檢測的有效傳感器,但其有一定的局限性,因此有文獻(xiàn)提出綜合考慮激光雷達(dá)和機(jī)器視覺的信息,進(jìn)行前方目標(biāo)車輛檢測 [8-9]。雖然激光雷達(dá)和機(jī)器視覺在一定程度可以互補,但激光雷達(dá)對天氣、燈光、障礙物表面光滑度等干擾非常敏感,不適合復(fù)雜道路環(huán)境。
由于毫米波雷達(dá)不易受外界干擾而且測量的距離精度高,可以準(zhǔn)確獲得前方車輛的速度、角度等深度信息。因此,本文提出利用毫米波雷達(dá)和機(jī)器視覺進(jìn)行多傳感器數(shù)據(jù)融合,通過先驗知識篩選毫米波雷達(dá)探測到的障礙物數(shù)據(jù),融合雷達(dá)數(shù)據(jù)和圖像信息初步確立動態(tài)感興趣區(qū)域(Region of Interest,ROI),在縮小的范圍內(nèi)基于視覺傳感器提取表征車輛的特征,運用 D-S 證據(jù)理論(Dempster-Shafer Evidential Theory)融合信息,減少了計算量和主觀閾值對檢測精確度的影響,提高了執(zhí)行速度和車輛定位的準(zhǔn)確性。
1. 夜間車輛檢測算法實現(xiàn)
整個過程分為假設(shè)產(chǎn)生(Hypothesis Generation,HG)和假設(shè)檢驗(Hypothesis Verifcation,HV)兩部分:
假設(shè)產(chǎn)生過程利用雷達(dá)獲取候選目標(biāo)的的距離、角度、速度等信息,進(jìn)而得到候選目標(biāo)的世界坐標(biāo),逆用攝像機(jī)標(biāo)定原理得到世界坐標(biāo)與圖像像素坐標(biāo)的轉(zhuǎn)換關(guān)系,初步確定候選目標(biāo)在圖像上的區(qū)域,即感興趣區(qū)域 ROI;
假設(shè)驗證過程是通過改進(jìn)的自適應(yīng)閾值確定方法(大津法,OTSU 法)進(jìn)行圖像分割處理,進(jìn)而利用圖像處理方法、先驗知識和 D-S 證據(jù)理論對感興趣區(qū)域檢測是否存在車輛特征。
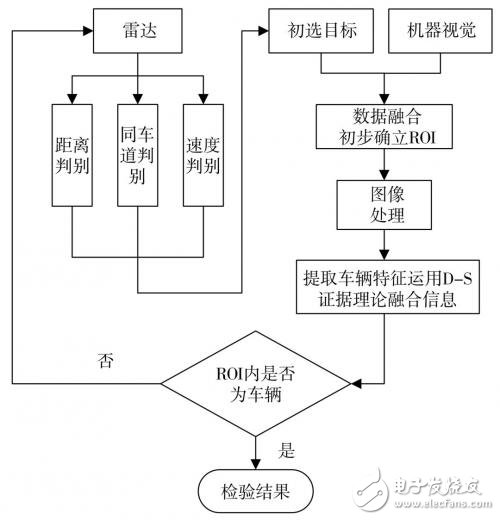
圖 1 夜間前方車輛檢測方法流程圖
算法流程圖如圖 1 所示。
2. 假設(shè)產(chǎn)生(HG)
2.1 雷達(dá)數(shù)據(jù)處理及初選目標(biāo)的確定
毫米波雷達(dá)接收到的是十六進(jìn)制數(shù)據(jù),根據(jù)雷達(dá)協(xié)議解算數(shù)據(jù),并提取可以用于車輛檢測的有效信息包括:前方車輛相對于本車的角度、距離、速度、反射強(qiáng)度。在實際測量中,毫米波雷達(dá)獲取的信號有一部分是空目標(biāo)信號、無效目標(biāo)信號、靜止目標(biāo)信號,首先要去除這 3 種目標(biāo)信號的干擾。
根據(jù)國家規(guī)定車道寬度設(shè)置橫向?qū)挾乳撝担M(jìn)行目標(biāo)與自車的同車道判斷,保留行駛方向距離閾值和相對速度閾值內(nèi)的目標(biāo),對篩選出的前方目標(biāo)由近及遠(yuǎn)的原則重新排序,使用同車道近距離原則初選有效目標(biāo),如表 1 所示。

表 1 初選有效目標(biāo)信號
表 1 中:ID 表示雷達(dá)檢測得到的目標(biāo)信號的標(biāo)準(zhǔn)幀號;α、R、Δv 分別為本車與目標(biāo)信號的相對角度、相對距離、相對速度(?v = v1 - v0,v1 為目標(biāo)速度,v0 為本車速度);p 從目標(biāo)返回信號的強(qiáng)度,即反射率。
長距離的毫米波雷達(dá)掃描范圍是 1~175 m,中距離是 1~60 m。距離小于 1 m 時雷達(dá)就不能識別物體。以避免車輛行駛過程中與前方車輛發(fā)生追尾碰撞為出發(fā)點,在有效目標(biāo)選擇過程中最關(guān)注的是與本車位于同一車道的前方最近車輛。當(dāng) Δv<0,有出現(xiàn)追尾事故的可能。因此,把雷達(dá)掃描近距離 1~60 m 內(nèi)、離本車最近且 Δv<0 的車輛作為初選目標(biāo)。
2.2 雷達(dá)數(shù)據(jù)和機(jī)器視覺的融合
雷達(dá)和機(jī)器視覺是不同坐標(biāo)系的傳感器,因此要實現(xiàn)雷達(dá)和機(jī)器視覺的空間融合,必須建立兩傳感器所在坐標(biāo)系的轉(zhuǎn)換模型,即雷達(dá)坐標(biāo)與圖像像素坐標(biāo)之間的轉(zhuǎn)換。雷達(dá)坐標(biāo)系與圖像像素坐標(biāo)系之間有著密切的聯(lián)系 [10],按照右手系原則建立坐標(biāo)系,由式 (1)-(2) 確定坐標(biāo)系之間的空間位置關(guān)系。
將世界坐標(biāo)系中的點 ( XW, YW, ZW ) 變換到圖像像素坐標(biāo) ( u, v ),轉(zhuǎn)換公式為:
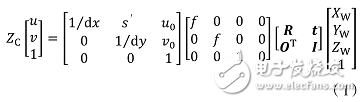
式中:( XW, YW, ZW, 1 )^T 是點的世界坐標(biāo),與其對應(yīng)的攝像機(jī)齊次坐標(biāo)是 ( XC, YC, ZC, 1 )^T,dx 與 dy 分別表示每個像素在橫、縱軸上的物理單位下的大小,f 是攝像機(jī)的焦距,s' 表示因攝像機(jī)成像平面坐標(biāo)軸相互不正交引出的傾斜因子(Skew Factor),R 代表旋轉(zhuǎn)矩陣(為一個 3×3 的正交單位矩陣),t 代表平移向量,I 是元素全為 1 的對角矩陣,O=(0, 0, 0)^T。
毫米波雷達(dá)獲取的前方障礙物信息是在極坐標(biāo)下的二維信息,將障礙物 P 的極坐標(biāo)下的二維信息轉(zhuǎn)換到直角坐標(biāo)系中,雷達(dá)坐標(biāo)系的 X0O0Z0 平面與世界坐標(biāo)系的 XOZ 平面平行,兩平面之間的距離為 Y0,通過雷達(dá)可以得到前方車輛中心點投影到雷達(dá)掃射平面內(nèi)的點 P 相對雷達(dá)的距離 R 和角度 α,確定點 P 在世界坐標(biāo)系下的坐標(biāo),轉(zhuǎn)換關(guān)系如下:
由雷達(dá)獲得前方車輛形心點的輸入,綜合以上建立雷達(dá)坐標(biāo)系和圖像像素坐標(biāo)系之間的相對關(guān)系,即可獲得前方車輛在像素平面的投影,基于車輛的常用外形(寬高比)投影在像素平面上,建立可以根據(jù)距離變化的動態(tài)感興趣區(qū)域,縮小在圖像上的搜索時間,減少計算量。通過統(tǒng)計發(fā)現(xiàn)一般車輛的寬高比在 0.7~2.0 范圍內(nèi),常見轎車、運動型多功能車(Sport Utility Vehicle,SUV)、面包車、商用車輛等車型的寬高比在 0.7~1.3 范圍內(nèi) [11],為了避免后續(xù)尾燈檢測時會遺漏尾燈目標(biāo),本文選取常見幾種車型的最大寬高比 W/H=1.3。
動態(tài)感興趣區(qū)域的確定如下:
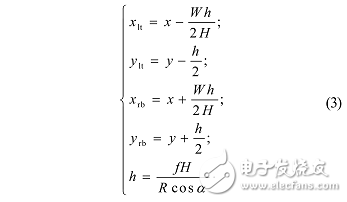
式中:( x_lt, y_lt ),( x_rb, y_rb )分別為動態(tài)感興趣矩形區(qū)域的左上角點和右下角點的像素坐標(biāo),( x, y )為車輛形心點的像素坐標(biāo)。
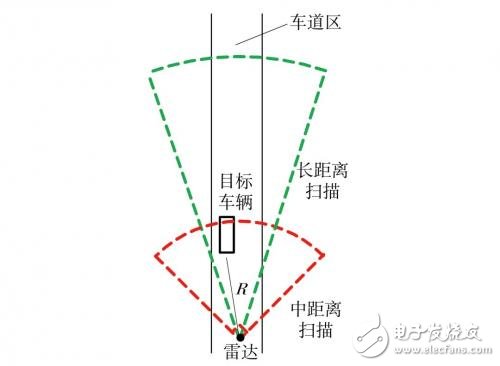
圖 2 雷達(dá)掃描圖

圖 3 雷達(dá)目標(biāo)在圖像上的的 ROI
雷達(dá)掃描圖如圖 2 所示。雷達(dá)坐標(biāo)系中的目標(biāo)經(jīng)坐標(biāo)轉(zhuǎn)換關(guān)系在圖像上形成的感興趣區(qū)域如圖 3 中的 (a) 列所示。動態(tài)感興趣區(qū)域的大小會隨目標(biāo)的距離發(fā)生變化,以更適合的尺寸截取感興趣區(qū)域圖像進(jìn)行下一步檢測驗證,縮小了檢測范圍,從而減少計算量提高檢測實時性。獲取的感興趣區(qū)域圖像如圖 3b 列所示。
3. 假設(shè)驗證(HV)
3.1 圖像分割
前方車輛尾燈對的灰度級與路面及背景的灰度級有明顯區(qū)別,采用閾值分割的方法可以快速準(zhǔn)確地將尾燈對分割出來。
本文采用改進(jìn)的 OTSU 算法分割圖像,凸顯出表征車輛特征的尾燈部分。改進(jìn)的 OTSU 算法是以傳統(tǒng) OTSU 為基礎(chǔ),從最小灰度值到最大灰度值遍歷,當(dāng)灰度 T 使得方差 σ^2 = w_0*w_1*(μ_0-μ_1)^2 最大時,再次利用傳統(tǒng) OTSU 對圖像中大于 T 的部分從灰度 T 到最大灰度值遍歷,得到閾值 T0 使大于灰度值 T 的部分的方差最大,提取閾值 T0,用 T0 對感興趣區(qū)域圖像進(jìn)行二值化分割,目標(biāo)灰度為 1,背景灰度為 0。

圖 4 分割后圖像
分割后的圖像如圖 4 所示。
-
機(jī)器視覺
+關(guān)注
關(guān)注
161文章
4369瀏覽量
120287 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2930瀏覽量
117468
發(fā)布評論請先 登錄
相關(guān)推薦
毫米波雷達(dá)信號的傳輸特性
毫米波雷達(dá)的基頻和調(diào)制技術(shù) 毫米波雷達(dá)在機(jī)器人導(dǎo)航中的應(yīng)用
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

毫米波雷達(dá)與多普勒雷達(dá)區(qū)別是什么
簡述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點
毫米波雷達(dá)具有哪些特點和優(yōu)勢
基于毫米波雷達(dá)的手勢識別算法
《道路車輛毫米波雷達(dá)協(xié)同式干擾抑制方法》國標(biāo)成功立項
巍泰技術(shù)毫米波雷達(dá)如何助力道路車輛預(yù)警?靜態(tài)目標(biāo)檢測是關(guān)鍵

毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
4D毫米波成像雷達(dá)的測試要求都有哪些嗯?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論