 Uber無人車致人死亡,無人駕駛可能成為“偽命題”
Uber無人車致人死亡,無人駕駛可能成為“偽命題”
日前,美國知名Uber公司的一輛測試無人車在亞利桑那州鳳凰城附近的Tempe撞死一名行人,由于這是已知的首例自動駕駛車致使行人死亡的事故,震驚了科技行業,而彭博社引述業內專家的話說,這一事故將讓外界對于自動駕駛汽車的信心倒退數年。而我們看到的是,這些年興起于科技企業,之后引得傳統汽車和初創企業紛紛追隨的自動駕駛汽車產業發展中的誤區和泡沫正在顯現。
具體到此次致死事故的主角Uber,為了加快商業化的步伐,從去年開始,其測試的無人駕駛汽車數量就不斷增加,但有資料顯示,其順暢度和安全性卻未能明顯提升。當時外媒獲得的內部文件顯示,對于Uber測試的無人駕駛車,人類駕駛員平均每0.8英里就要干涉一次。
另外,大約每行駛2英里,Uber測試車就會出現“糟糕體驗”,例如猛踩油門或猛打方向(對于駕駛均是相當危險的舉措)。所謂的“重要干預”則每過200英里就會出現一次,倘若不加以干預,就有可能撞到行人,或者造成超過5000美元的財產損失。
數據表明,Uber無人駕駛汽車的順暢性和安全性并沒有隨著測試范圍的擴大和測試用車的增多而同步改進。而這也為此次致死事故埋下了伏筆。
在此也許有人會稱,這恰恰說明Uber測試的里程數少,隨著未來測試里程數的增加,其自動駕駛的能力肯定會提升。事實真的如此嗎?
我們這里先不說Uber自己經歷的測試不斷增加,但自動駕駛能力(例如順暢性和安全性)并未同步改進而陷入的測試里程數與自動駕駛能力增長的誤區,單以目前在自動駕駛汽車領域測試里程數最高的Waymo為例,其實際上也面臨著上述誤區的質疑。
日前,Waymo表示該公司的測試車隊已在公路上以自動駕駛模式行駛了500萬英里(約合800萬公里),是Uber去年12月達到的自駕里程數(200萬英里)的兩倍多。但業內認為,Waymo完成的里程數還遠遠不夠。據美國智庫蘭德公司的研究顯示,要保證自動駕駛汽車的可靠性,使之能夠應對公共道路上發生的所有狀況以避免交通事故,需要數億甚至數千億的測試里程。
即便如此,蘭德公司又補充到,依然不確定如何評定Waymo的模擬駕駛數據,即不清楚這些英里數的實際情況,或它們對現實世界的反映程度,也不清楚測試車在模擬中的實際表現。

不知業內從上述看到了什么?我們看到的是,先不說測試數億,甚至數千億英里里程的可行性,更重要的是其測試的質量如何衡量和保證就極有可能是個無解的問題。當然,我們在此并非否定路測對于自動駕駛能力提升的價值,只是一味以測試里程數提升自動駕駛能力很可能讓自動駕駛產業和相關企業陷入誤區(除了宣傳的噱頭,充其量是無實際價值的跑路)。
除了測試的里程數外,目前對于自動駕駛分級標準的制定似乎也存在著誤區。眾所周知,目前針對自動駕駛的等級劃分主要有兩個標準,一個是由美國交通部下屬的NHSTA(國家高速路安全管理局)所制定,另一個則是由SAE International(國際汽車工程師協會)所制定,其中SAE的標準更為清晰、簡潔,所以目前的通行標準是SAE International的標準。

根據SAE的標準,其將自動駕駛分為了5個等級,但只要我們稍加觀察,前4個標準其實均需要人類駕駛員的干預,但對于干預的場景界定卻相當的模糊,而這種模糊的界定,又讓相關企業在宣傳和實施中給用戶的使用和體驗造成了模糊,甚至是誤導。
以特斯拉為例,其知名的自動駕駛系統Autopilot,雖然對外號稱是自動駕駛,但其手冊中卻警示稱,系統并不能很好地處理某些情況,例如“交通探測巡航控制技術無法探測所有對象,在遇到靜止車輛時有可能不會剎車/減速,尤其是在時速超過80公里時,或者你前方車輛變道,前方變成靜止車輛或對象時。”
同樣沃爾沃的半自動駕駛系統Pilot Assist也存在類似模糊的界定,例如在前方車輛變道或轉彎時,沃爾沃的用戶手冊顯示:“Pilot Assist會忽略靜止車輛,繼續加速至預設速度,此時司機必須進行干預,并踩下剎車。”換句話說,你的沃爾沃汽車不會剎車,以避免撞上前方突然出現的靜止汽車,車輛反而還有可能繼續加速撞上去。實際情況是對于當前所有配備所謂自動駕駛的汽車來說,情況基本都是如此。
不知業內看到上述所謂自動駕駛的標準及相關廠商的自動駕駛系統作何感想?我們認為,模糊的界定標準,尤其是需要人類駕駛員干預的前提下,自動駕駛系統非但沒有減輕人類駕駛員的壓力(要準備隨時介入),反而可能會比自己親自駕車更緊張(例如決定是否干預?選擇干預的時機?干預的力度等諸多相比較自己親自駕駛平添了許多不確定的因素,更重要的是這些因自動駕駛甩給人類干預的決策過程會延誤寶貴的時間)。
就好比汽車教練員和老司機在副駕駛看學員和新手開車,盡管沒有親自駕駛汽車,但他們的注意力和緊張絲毫不亞于學員和新手,甚至有過之而無不及。那么最核心目的是為了減輕人類駕駛員負擔的自動駕駛意義和價值何在呢?
此外,隨著未來將會有越來越多從未在沒有自動駕駛的情況下駕駛司機的增多。如果這些汽車被設計得會在遇到意想不到的情況時將駕駛任務交還給人類司機,那么人類司機可能會措手不及,在生死攸關的關頭恰恰出錯。這同樣違背了自動駕駛系統推出和采用的初衷,又是一個可能產生的誤區。其實這種誤區產生的悲劇早在航空業就已經出現。
最典型的例子就是2009年,法國航空447號班機在從里約熱內盧飛往巴黎的途中墜入大海。該事故的起因是:飛機的傳感器上的冰塊導致自動駕駛功能停止運行。由于缺乏在沒有自動駕駛輔助的情況下處理飛機問題的經驗,飛行員恰恰犯下了錯誤,即本應降低機頭,但他卻拉高機頭。飛機因此失速,之后墜入海洋,機上的228人全部遇難。
除了上述之外,有業內人士可能會稱,我們低估了自動駕駛汽車技術的發展。事實真的如此嗎?
我們仍以此次致死事故的Uber為例,據媒體報道,Uber自動駕駛汽車配備了多個不同的成像系統,它們既可以執行普通任務(監控附近汽車、標記和車道線),也可以執行特殊任務,例如讓汽車減速、剎車等,即在這起事故中,能夠拯救受害者的圖像系統應該不少于4個。
不幸的是,即便如此,Uber也未能避免致死事故的發生。原因何在?也許被福特公司投資10億美元的Argo AI公司 CEO Bryan Salesky此前對于自動駕駛汽車的評論可以給予很好的解釋,即Salesky建議公眾降低他們對自動駕駛汽車的期盼,因為在討論自動駕駛汽車,他們還需要越過一些障礙,其中大部分都跟硬件相關,諸如現階段所用的激光雷達(需要攝像頭構建出它自己的地圖,而這本身就可能存在問題)以及超聲波傳感器(在惡劣天氣條件很難工作)等。
看來,即便是目前相關廠商對于自動駕駛技術過度的吹捧,也讓自動駕駛汽車陷入了已然成熟的誤區。
如果說上述是自動駕駛在測試、標準、與人類駕駛員的主從關系、技術成熟度等方面的誤區的話,其由此產生的泡沫也開始顯現,并同樣產生了產業投資高漲與用戶冷落的誤區。
美國知名研究機構“布魯金斯研究院”(The Brookings institute)近期發布報告稱,全球汽車廠商和科技公司已在自動駕駛領域投入了約800億美元,但到目前為止仍沒有一家明顯的領先廠商。報告還特別指出,其所收集的160筆交易完全基于公開信息。可以想象,由于數據有限,該領域的實際投資額要高于800億美元。而且,隨著技術的深入發展,將來還會有更多的資金投入。

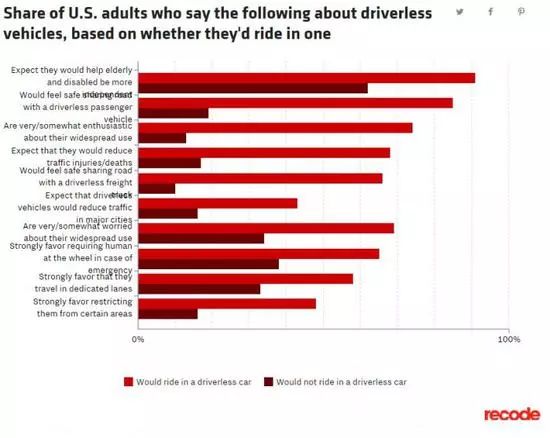
與不斷涌入的投資相比,根據皮尤研究中心公布的最新數據,美國公民卻還沒有做好迎接無人駕駛的準備。根據調查數據顯示,大約有2/3的美國成年人期望在未來半個世紀中實現車輛無人化(只有8%的受調查者希望從未發生)。與此同時,如果可以選擇的話,超過一半(56%)的美國人并不希望駕駛無人駕駛汽車。至于那些不愿意駕駛乘坐無人駕駛汽車的受調查者,主要是認為不可靠和實用性不大。

對此,菲亞特克萊斯勒汽車公司首席執行官塞爾焦·馬爾喬內(Sergio Marchionne)警告稱,“在自動駕駛領域里的瞎忙活,將使你浪費大量財富。”
綜上所述,我們認為,此次Uber自動駕駛汽車測試致死事故背后,暴露出了自動駕駛汽車產業諸多在發展過程中已經和即將產生的誤區及泡沫,而如果我們的相關企業和部門不能以此為戒調整發展策略的話,自動駕駛,乃至未來的無人駕駛非但不能實現,有可能成為一個“偽命題”。
-
自動駕駛
+關注
關注
784文章
13877瀏覽量
166618
原文標題:Uber無人車致人死亡,自動駕駛奔向“泡沫區”
文章出處:【微信號:mcuworld,微信公眾號:嵌入式資訊精選】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
魯渝能源無線充電技術在低速無人駕駛環衛車中的創新應用
小馬智行第六代無人駕駛Robotaxi亮相香港國際機場
全球首個海拔5000米高原露天礦無人駕駛成果發布
東華軟件:多地無人駕駛項目成功落地
九識無人駕駛消防宣傳車亮相懷化,開啟城市消防宣傳新模式

UWB模塊如何助力無人駕駛技術
無線充電技術為低速無人駕駛清掃車注入無限動力
特斯拉推出無人駕駛Model Y
百度計劃海外推出蘿卜快跑無人駕駛服務
優步將與Waymo合作推出無人駕駛出租車服務
5G賦能車聯網,無人駕駛引領未來出行

無人駕駛汽車應用晶振TSX-3225

中國或支持特斯拉測試無人駕駛出租
如何利用無人機物聯卡實現無人駕駛飛行
5G車載路由器引領無人駕駛車聯網應用






 工商網監
工商網監
評論