

恩智浦的MR-VMU-RT1176是一款緊湊型、一體式車輛管理單元 (VMU)。該器件搭載i.MX RT1176跨界MCU,集成雙核Arm Cortex-M7/M4處理器,并配備全面的傳感器套件與豐富的連接選項,能夠顯著加速工程師構(gòu)建下一代系統(tǒng)的進程。
移動機器人設計人員面臨的挑戰(zhàn)
移動機器人系統(tǒng)的設計極具復雜性,工程師需在一個系統(tǒng)內(nèi)平衡實時控制、傳感器融合及高速通信。傳統(tǒng)設計需要集成多個分立式組件,如微控制器 (MCU)、慣性測量單元 (IMU)、全球?qū)Ш叫l(wèi)星系統(tǒng) (GNSS) 模塊及網(wǎng)絡接口,導致架構(gòu)分散、繁瑣,還延長了開發(fā)周期。
在移動機器人系統(tǒng)的設計過程中,工程師需應對多重挑戰(zhàn)。其中實時處理是最嚴苛的環(huán)節(jié)之一,控制環(huán)路、傳感器融合及自主決策均要求低延遲執(zhí)行。許多MCU在高計算性能與實時約束之間難以取得平衡,工程師往往需要整合多個處理器或外部加速器,這進一步增加了復雜性與開發(fā)難度。
集成是另一個考慮要素,移動機器人要求確保處理單元、IMU、GNSS模塊、電機控制器和網(wǎng)絡接口的精準協(xié)調(diào)。然而,在傳統(tǒng)設計中,工程師需要手動集成和同步這些組件,這不僅增加了開發(fā)時間,還可能帶來不兼容的風險。
可靠的通信也非常重要。VMU必須以非常低延遲的傳輸傳感器數(shù)據(jù)與執(zhí)行器指令,以確保穩(wěn)定、可預測的運動表現(xiàn)。然而,許多系統(tǒng)仍依賴傳統(tǒng)協(xié)議,缺乏對CAN FD或汽車以太網(wǎng)等穩(wěn)健、低延遲網(wǎng)絡解決方案的支持,限制了數(shù)據(jù)傳輸效率與實時性。
最后,工程師廣泛依賴PX4、Zephyr RTOS和Cognipilot等開源生態(tài)合作體系的軟件,這些合作體系為實時控制提供必要的中間件和框架。然而,將這些軟件與定制硬件配置無縫集成通常需要大量的開發(fā)工作。
借助模塊化解決方案優(yōu)化移動機器人
MR-VMU-RT1176提供緊湊的模塊化解決方案,高效應對上述挑戰(zhàn)。

MR-VMU-RT1176是一款緊湊、輕便的車輛管理單元解決方案,專為移動機器人設計。
處理能力
MR-VMU-RT1176基于i.MX RT1176跨界MCU構(gòu)建,專為滿足移動機器人嚴苛的計算需求而設計。它采用雙核架構(gòu),其中Cortex-M7 (1GHz) 用于控制環(huán)路、傳感器融合及人工智能推理等高性能實時任務,而Cortex-M4 (400MHz) 則高效地管理后臺處理,減輕主核的負擔。此外,該系統(tǒng)配備64MB外部閃存與2MB RAM,確保固件執(zhí)行及實時數(shù)據(jù)處理的充足存儲空間。
開始構(gòu)建下一代移動機器人,先了解一下MR-VMU-RT1176產(chǎn)品詳情
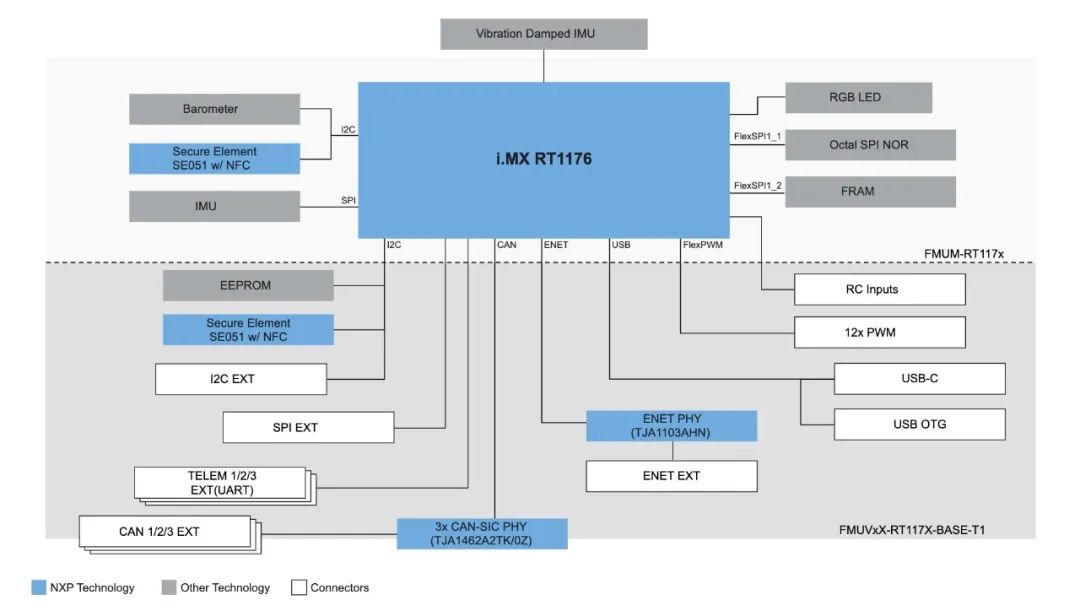
MR-VMU-RT1176結(jié)構(gòu)框圖
全面的傳感器套件
MR-VMU-RT1176集成了一套全面的傳感器套件,可實現(xiàn)機器人系統(tǒng)的高精度運動跟蹤與環(huán)境感知。該套件包括:
BMI088 6軸IMU,用于精確運動傳感
BMM150和IST8310磁力計,用于航向與方位估計
兩個BMP388氣壓計,用于高度和壓力傳感
兩個ICM-42688 6軸IMU,用于增強運動跟蹤的冗余與精度
其中一半傳感器集成于內(nèi)部連接的IMU板,使工程師能夠輕松替換傳感器,以適應未來的系統(tǒng)升級需求。
連接和接口選項
工程師需要靈活的通信選項,以便將VMU與電機、傳感器及網(wǎng)絡模塊高效集成。MR-VMU-RT1176提供:
USB-C 2.0連接器和JST-GH引腳接頭,用于高速數(shù)據(jù)傳輸
12路PWM輸出,可直接控制執(zhí)行器、伺服系統(tǒng)及電機
具有信號提升能力 (SIC) 的三重CAN-FD
100Base-T1汽車以太網(wǎng),支持高帶寬數(shù)據(jù)交換
RC輸入與SBUS兼容接收器兼容,用于遠程控制
由于這些連接器均遵循Dronecode標準,工程師能夠輕松訪問龐大的即插即用組件生態(tài)合作體系,這些組件能夠與MR-VMU-RT1176搭配使用。
開發(fā)人員體驗與軟件生態(tài)合作體系
MR-VMU-RT1176具備高度兼容性,能夠與開源實時操作系統(tǒng)及機器人框架輕松集成。例如,它支持Zephyr RTOS,這是一個專為實時嵌入式應用設計的輕量級模塊化系統(tǒng)。此外,該系統(tǒng)支持用于自主機器人的Cognipilot,它提供了一個基于Zephyr的自動駕駛平臺。該單元還運行NuttX RTOS,這是一款符合POSIX標準的操作系統(tǒng),以其強大的實時處理能力而聞名。此外,它還支持PX4,這是一款廣泛用于無人機和移動機器人的飛行控制軟件。
值得注意的是,PX4由QGroundControl補充。QGroundControl是一款用于任務規(guī)劃、GPS航路點管理、遙測和測繪的地面站軟件。該軟件可在筆記本電腦、Android設備和定制硬件上運行,使用戶能夠從幾乎任何地點實現(xiàn)全面的系統(tǒng)控制。
開發(fā)人員入門指南
借助Zephyr存儲庫的上游支持,開發(fā)人員可以輕松使用Zephyr RTOS設置MR-VMU-RT1176。
1
從恩智浦的存儲庫下載預配置的固件。
2
使用Zephyr構(gòu)建系統(tǒng)編譯和燒寫自定義應用程序。由于支持完全集成到Zephyr中,開發(fā)人員只需遵循標準的Zephyr開源說明,并選擇MR-VMU-RT1176作為目標平臺。
3
利用Cognipilot的框架進行自動駕駛和自主系統(tǒng)開發(fā)。
移動機器人:邁向智能未來
移動機器人設計雖極具挑戰(zhàn)性,但其發(fā)展格局完全可以重塑。
MR-VMU-RT1176為工程師提供了緊湊型、強大的解決方案,通過模塊化架構(gòu),結(jié)合了高性能處理、集成傳感器及廣泛的連接選項。借助預構(gòu)建固件、Zephyr文檔及恩智浦開發(fā)資源,工程師能夠快速上手。

本文作者
Altaf Hussain,恩智浦半導體運輸與移動細分市場市場總監(jiān)。Altaf在企業(yè)、服務提供商和工業(yè)應用的應用工程、產(chǎn)品營銷和業(yè)務開拓方面擁有30多年的經(jīng)驗。他目前擔任恩智浦運輸與移動部門的負責人,該部門專注于移動機器人、機器視覺和倉庫物流自動化領域。Altaf致力于制定系統(tǒng)解決方案,幫助客戶借助自主移動機器人加速自動化進程。他擁有英國倫敦南岸大學的電氣與電子工程學士學位。
-
mcu
+關注
關注
146文章
17893瀏覽量
361803 -
機器人
+關注
關注
213文章
29567瀏覽量
211940 -
恩智浦
+關注
關注
14文章
5956瀏覽量
114091 -
移動機器人
+關注
關注
2文章
787瀏覽量
34049 -
i.MX
+關注
關注
1文章
58瀏覽量
36556
原文標題:極具挑戰(zhàn)的移動機器人設計,恩智浦的一體式VMU幫你輕松應對!
文章出處:【微信號:NXP客棧,微信公眾號:NXP客棧】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
在i.MX RT 1176上正常運行代碼時與使用IAR調(diào)試代碼時存在一些奇怪的差異,為什么?
在MR-VMU-RT1176上運行的PX4飛行控制軟件的負載(大約)是多少?
《電子發(fā)燒友電子設計周報》聚焦硬科技領域核心價值 第9期:2025.04.21--2025.04.25
恩智浦i.MX RTxxx系列MCU的特性
RT1176 SDK v2.12.1錯誤問題如何解決?
RT1176如何調(diào)試自定義FlexSPI配置塊?
RT1176如何放大相機框架?
01:i.MX RT的市場應用和參考解決方案
恩智浦i.MX RT1170開創(chuàng)GHz MCU時代
恩智浦i.MX RT1170在將該系列帶上了更高的層面
恩智浦推出核跨界MCU的第二款產(chǎn)品i.MX RT1160
恩智浦i.MX RT1060/1010上串行NOR Flash冗余程序啟動設計
恩智浦i.MX RT1170 uSDHC eMMC啟動時間
MR-VMU-RT1176解決方案簡化移動機器人設計,并提升其性能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論