") Uber自動(dòng)駕駛事故原因解析_自動(dòng)駕駛事故還有哪些
Uber自動(dòng)駕駛事故原因解析_自動(dòng)駕駛事故還有哪些
日前,一輛Uber自動(dòng)駕駛汽車(chē)在美國(guó)亞利桑那州坦貝市的一條街道上,以每小時(shí)65公里的速度撞上了一位橫穿馬路的女子。該女子在送往醫(yī)院后不久,不治身亡。這是全球首例自動(dòng)駕駛汽車(chē)路測(cè)撞死行人的交通事故,引發(fā)了公眾的極大關(guān)注以及對(duì)自動(dòng)駕駛汽車(chē)安全性的擔(dān)憂(yōu)。下面就隨汽車(chē)電子小編一起來(lái)了解一下相關(guān)內(nèi)容吧。
事發(fā)后不久,坦貝市警察局局長(zhǎng)對(duì)媒體表示,這場(chǎng)車(chē)禍無(wú)論是不是人類(lèi)駕駛,都是不可避免的,這可能不是Uber的錯(cuò)。
然而,這真的是一場(chǎng)無(wú)可避免的交通悲劇嗎?
眾說(shuō)紛紜的車(chē)禍原因
車(chē)禍發(fā)生后,很多媒體和專(zhuān)家對(duì)車(chē)禍原因做了分析和猜測(cè)。
美國(guó)的網(wǎng)友看過(guò)視頻后表示,在光線(xiàn)昏暗的情況下,攝像頭的“視力”通常差得要命,如果用肉眼觀察,也許能更早注意到行人橫穿。
地平線(xiàn)機(jī)器人創(chuàng)始人余凱在接受媒體訪談時(shí),分析猜測(cè)認(rèn)為造成有可能是這輛自動(dòng)駕駛汽車(chē)的預(yù)測(cè)判斷做的不好,出現(xiàn)了問(wèn)題,沒(méi)能準(zhǔn)確預(yù)判出障礙物的走向。
眼擎科技創(chuàng)始人朱繼志在其微博中表達(dá)了不同的看法。他認(rèn)為,問(wèn)題在于攝像頭,人從暗部走向亮部,因?yàn)槁窡舻脑颍饩€(xiàn)明暗反差太大。在暗部的時(shí)候,汽車(chē)沒(méi)有監(jiān)測(cè)到,等行人走到亮部的時(shí)候,汽車(chē)雖然監(jiān)測(cè)到,但已經(jīng)太遲了。
同時(shí),他認(rèn)為夜間道路光線(xiàn)環(huán)境太復(fù)雜,汽車(chē)攝像頭的動(dòng)態(tài)范圍需要提升30倍以上,自動(dòng)駕駛汽車(chē)才有上路的可能。
也有業(yè)內(nèi)人士分析,這輛Uber自動(dòng)駕駛汽車(chē)已經(jīng)檢測(cè)到了行人,只是沒(méi)有采取剎車(chē)或停車(chē)措施,致使釀成撞人事件。
傳統(tǒng)成像技術(shù)的天花板
眾所周知,當(dāng)前無(wú)人駕駛汽車(chē)所采用的視覺(jué)系統(tǒng) ,主要是基于攝像頭和光學(xué)雷達(dá)。有業(yè)內(nèi)人士對(duì)其相關(guān)的視覺(jué)性能優(yōu)勢(shì)和缺陷做了分析對(duì)比:

從圖中我們不難得出一個(gè)結(jié)論,沒(méi)有一種方案是完美無(wú)瑕,萬(wàn)無(wú)一失的。對(duì)于基于傳統(tǒng)成像技術(shù)的攝像頭而言,受光照條件的影響非常大,在強(qiáng)光、弱光、逆光、反光等情況下,基本歇菜。
而當(dāng)前最受車(chē)企青睞的激光雷達(dá),也有很難逾越的短板。且不說(shuō),短期內(nèi)無(wú)法迅速降低的成本,除了分辨率低外(當(dāng)然現(xiàn)在已經(jīng)有128線(xiàn),甚至300線(xiàn)的激光雷達(dá),但與攝像頭的分辨率還是不可同日而語(yǔ)),最大的問(wèn)題是無(wú)法辨識(shí)顏色,即無(wú)法表示交通標(biāo)示。
另外,激光雷達(dá)也受環(huán)境的影響,就連特斯拉和谷歌都承認(rèn),即使是堆滿(mǎn)昂貴攝像頭和激光雷達(dá)的無(wú)人駕駛汽車(chē)在大雪天也基本被廢掉一半功力。
現(xiàn)在的自動(dòng)駕駛汽車(chē)都采用攝像頭與雷達(dá)搭配的方案(或激光雷達(dá)+攝像頭,或毫米波雷達(dá)+攝像頭),妄圖彌補(bǔ)各自的不足。但顯然這樣的策略也沒(méi)有達(dá)到1+1>2的效果。原因很簡(jiǎn)單,一方很難彌補(bǔ)另一方的短板。比如Uber自動(dòng)駕駛汽車(chē)撞人致死的事件中,顯然車(chē)上的攝像頭因?yàn)楣饩€(xiàn)問(wèn)題沒(méi)有監(jiān)測(cè)到正要橫穿馬路的路人(除非汽車(chē)的剎車(chē)系統(tǒng)壞掉了),而激光雷達(dá)即使監(jiān)測(cè)到了有反射信號(hào),也無(wú)法判斷出是行人。正如有專(zhuān)家分析,因?yàn)槠渚窒扌裕鈱W(xué)雷達(dá)并不是為檢測(cè)行人設(shè)計(jì)的。因?yàn)楣鈱W(xué)雷達(dá)分辨率有限,刷新率不高,更無(wú)法獲取物體對(duì)象的顏色信息。所以它不善于實(shí)時(shí)地分辨物體。
給自動(dòng)駕駛汽車(chē)一雙慧眼
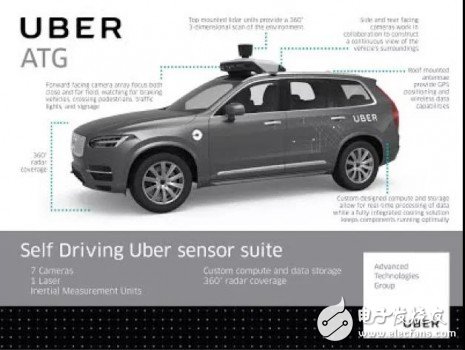
從Uber自動(dòng)駕駛汽車(chē)傳感器示意圖看,這輛出事的自動(dòng)駕駛汽車(chē)上面也安裝了不少攝像頭,并且這些攝像頭都正常工作,卻并沒(méi)有避免悲劇的發(fā)生。為什么?
很簡(jiǎn)單,這些攝像頭的視覺(jué)能力比不上人眼。
正如專(zhuān)家所說(shuō),傳統(tǒng)的攝像頭成像技術(shù),機(jī)器的視覺(jué)能力無(wú)法與人的眼力相比,甚至很難接近。因?yàn)閭鹘y(tǒng)的成像技術(shù)更專(zhuān)注于做給人看的圖像處理,即做圖像的優(yōu)化。而在機(jī)器的眼中,不注重像素高低,更不需要美顏,它需要的是精準(zhǔn)的測(cè)量現(xiàn)實(shí)世界,不僅色彩高度還原、而且邊緣清晰、銳度高等。
這就意味著傳統(tǒng)的攝像頭無(wú)法滿(mǎn)足AI機(jī)器在復(fù)雜光線(xiàn)下的正常運(yùn)作。
而對(duì)于駕駛員輔助系統(tǒng),關(guān)鍵挑戰(zhàn)則在于保證系統(tǒng)在任何環(huán)境狀況下(溫度變化、陽(yáng)光照射、黑暗中或雨雪天氣)都能正常工作,而且還要能辨認(rèn)出300米以外的物體。
事故發(fā)生后,Uber暫停了自動(dòng)駕駛汽車(chē)路測(cè),豐田暫停了自動(dòng)駕駛汽車(chē)的路測(cè),據(jù)說(shuō),英偉達(dá)也暫停了自動(dòng)駕駛汽車(chē)的路測(cè)。
希望之光
不久前拜訪眼擎科技時(shí),工作人員向筆者演示了他們最新推出的一項(xiàng)AI視覺(jué)成像引擎視覺(jué)技術(shù)成果:在昏暗辦公室內(nèi),搭載了眼擎科技AI視覺(jué)成像引擎方案的攝像頭在室內(nèi)只有一臺(tái)電腦顯示屏作為光源的條件下,呈現(xiàn)出了明亮、清晰、色彩還原度相當(dāng)高的圖像。而此時(shí),人眼已無(wú)法分辨出被拍攝對(duì)象的顏色和輪廓。
對(duì)此,工作人員解釋說(shuō),眼擎科技希望解決的是AI機(jī)器在復(fù)雜光線(xiàn)下的自動(dòng)適應(yīng)能力。
有關(guān)資料顯示,不論2D還是3D攝像頭都需要圖像傳感器有至少130dB的高動(dòng)態(tài)范圍(動(dòng)態(tài)范圍指一個(gè)多媒體硬盤(pán)播放器輸出圖像的最亮和最暗部分之間的相對(duì)比值)。只有這么高的動(dòng)態(tài)范圍才能保證,即使陽(yáng)光直射到鏡頭上,傳感器也能得到清晰的圖像信息。普通的鏡頭系統(tǒng)動(dòng)態(tài)范圍遠(yuǎn)遠(yuǎn)低于這個(gè)值。
該工作人員解釋?zhuān)矍婵萍嫉姆桨冈诔上竦膭?dòng)態(tài)范圍上比人眼高18db,所以在人眼無(wú)法辨別色彩的極弱光條件下仍能輸出清晰的彩色圖片。
今年1月份,眼擎科技發(fā)布了全球首款完全自主研發(fā)的AI視覺(jué)前端成像芯片“eyemore X42”。
據(jù)悉,eyemore X42成像引擎芯片,擁有比傳統(tǒng)ISP高20倍的計(jì)算能力,采用了20多種新的成像算法,集成了超過(guò)500種不同場(chǎng)景下的復(fù)雜光線(xiàn)數(shù)據(jù)。
其中一個(gè)重要原因,eyemore X42拋棄了傳統(tǒng)的ISP成像架構(gòu),采用了全新的成像引擎架構(gòu),來(lái)解決復(fù)雜光線(xiàn)下的成像難題。
除此之外,eyemore X42芯片還具有獨(dú)立成像以及API接口豐富的特點(diǎn)。
就像人眼擁有超強(qiáng)的視覺(jué)能力,不僅僅在于強(qiáng)大的光學(xué)成像系統(tǒng),更重要的是人眼通過(guò)神經(jīng)與大腦的交互。基于此,眼擎科技也為成像引擎設(shè)計(jì)了一套與后端AI算法的交互架構(gòu),來(lái)獲知AI對(duì)圖像的需求。
眼擎科技創(chuàng)始人朱繼志表示,這種與AI系統(tǒng)的交互能力,將使得成像系統(tǒng)真正成為AI的有機(jī)器官。
寫(xiě)在最后
在本月初的“2018全球AI芯片創(chuàng)新峰會(huì)”上,眼擎科技與商湯、地平線(xiàn)等AI新秀一起榮膺“年度AI先鋒”獎(jiǎng),代表了業(yè)內(nèi)對(duì)眼擎科技AI視覺(jué)前端成像技術(shù)的認(rèn)可。
誠(chéng)然,從Uber和豐田相繼叫停路測(cè)來(lái)看,公眾對(duì)自動(dòng)駕駛汽車(chē)最大的顧慮還是安全問(wèn)題。而安全問(wèn)題的解決,主要取決于車(chē)輛本身能否及時(shí)監(jiān)測(cè)到危機(jī)或作出及時(shí)的處理。這就需要自動(dòng)駕駛汽車(chē)整個(gè)產(chǎn)業(yè)鏈的成熟發(fā)展,包括道路基礎(chǔ)建設(shè)和5G網(wǎng)絡(luò)的興起,而其中最關(guān)鍵的還是需要車(chē)輛本身有一雙慧眼。而傳統(tǒng)的攝像頭成像天花板已非常明顯,以眼擎科技AI視覺(jué)前端成像引擎技術(shù)為代表的新生代,或許是沖破天花板的希望所在。
附2015年至今的全球13起自動(dòng)駕駛汽車(chē)交通事故:
時(shí)間
事件梗概
2018年3月23日
23日,一輛特斯拉2017 Model X在美國(guó)加州101號(hào)高速公路上行駛時(shí),撞上了公路的護(hù)欄后起火,并被后方兩輛來(lái)車(chē)撞上。
2018年3月18日
美國(guó)亞利桑那州一名女子被Uber一輛正在路測(cè)的自動(dòng)駕駛汽車(chē)撞傷,被撞女子身亡
2018年1月22日
一輛開(kāi)啟了自動(dòng)駕駛模式的特斯拉Model S在洛杉磯405高速公路上撞上了一輛停在路邊的消防車(chē)。
2018年1月12日
一輛特斯拉Model 3翻入了一條小溪
2018年1月10日
在美國(guó)賓夕法尼亞州匹茨堡,一輛廂式貨車(chē)闖紅燈,撞到了福特的一輛自動(dòng)駕駛汽車(chē)
2017年12月7日
在溫哥華,一輛Cruise自動(dòng)駕駛汽車(chē)正以自動(dòng)駕駛模式行駛,變道時(shí)剮蹭了變道中的一輛摩托車(chē)
2017年11月8日
在美國(guó)拉斯維加斯,一輛無(wú)人駕駛巴士與一輛卡車(chē)相撞
2017年3月24日
在亞利桑那州坦佩市,一輛測(cè)試中的Uber自動(dòng)駕駛汽車(chē)與一輛普通汽車(chē)發(fā)生了碰撞。
2016年9月23日
在美國(guó)山景城,谷歌的一輛無(wú)人駕駛測(cè)試車(chē)遭受了一輛道奇商用貨車(chē)的嚴(yán)重撞擊。
2016年5月7日
一輛特斯拉Model S在佛羅里達(dá)州高速公路上與一輛垂直方向開(kāi)來(lái)的掛車(chē)發(fā)生相撞
2016年2月14日
在硅谷芒廷維尤市,谷歌的“雷克薩斯”牌改裝無(wú)人駕駛汽車(chē)在路測(cè)時(shí),與一輛公共汽車(chē)的右側(cè)相撞。
2016年1月20日
京港澳高速河北邯鄲段,一輛開(kāi)啟了自動(dòng)駕駛模式的特斯拉轎車(chē)直接撞上一輛正在作業(yè)的道路清掃車(chē)
2015年7月1日
谷歌公司一輛雷克薩斯牌改裝無(wú)人駕駛樣車(chē)在加利福尼亞州芒廷維尤市街頭測(cè)試時(shí)發(fā)生追尾事故
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13784瀏覽量
166386
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論