 工業機器人系統的概貌,簡介工業機器人的分類與控制系統
工業機器人系統的概貌,簡介工業機器人的分類與控制系統
在我們心中的機器人都是被人格化后的機器人形象。那么,把機器人尤其是工業機器人形象解構以后,他又會是什么樣子呢?
平時不論是新聞上看到的工業機器人、雙足機器人、四足機器人還是動漫作品里的機器人形象大部分是機器人本體,而機器人控制系統則是幕后功臣,類似于人的大腦,這個控制系統往往安裝在機器人本體的內部或是有一個單獨的控制單元。
下圖描繪了一個工業機器人系統的概貌,一個工業機器人系統包括了機器人本體、伺服電機(或者是直流電機)、減速機、驅動器、控制器、示教器、還有一些外圍的設備,比如攝像頭、六維力傳感器、IO模塊、焊接部件等等。

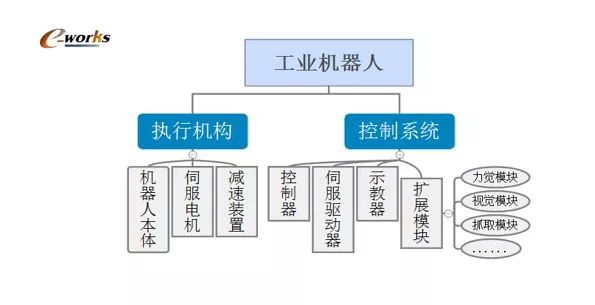
對于一個工業機器人系統而言,我們對上面的圖進行簡化,將剛才的工業機器人系統簡化,抽取出工業機器人系統中必不可少的部分:控制系統、機器人本體和示教器。

而控制系統從常規結構上可以分為兩部分:執行機構和控制系統。執行機構包括機器人本體、伺服電機和減速裝置;控制系統則分為控制器、伺服驅動器、示教器和拓展模塊,其中拓展模塊包括力覺模塊、視覺模塊、抓取模塊等,也就是說我們我們所看到的機器人能完成的每個動作,都需要添加拓展模塊。
舉個例子,假如英雄聯盟中的蒸汽機器人布里茨缺少了抓取模塊,就不能完成機械飛爪技能中的抓取敵人功能啦。
現在進入重點啦,下面來具體分析一下控制系統中每個部分的功能和用途吧。
對于工業機器人系統而言,示教器是用于與用戶交互的設備,它能夠處理和記憶用戶賦予工業機器人的任務指令。一般情況下,它分為三種模式:示教模式、在線模式和遠程模式。
示教模式用于示教機器人的動作序列,最終以作業的形式保存在示教盒中;
在線模式是復現用戶示教的作業,此時需要示教器對作業進行在線解析,并將解析結果發送給控制器。
遠程模式是指用戶可以通過一根網線或是通過網絡的形式控制機器人動作,此時,用戶不一定就在機器人旁邊,可以是遠程遙控。
更通俗一點的理解:示教器就像遙控賽車的遙控器,用遙控器操縱賽車和使用示教器控制工業機器人是一樣的道理,emmm,這么一想好像高大上的工業機器人也變得沒那么神秘了。
當然了,示教器的界面風格也不盡相同,下面是部分示教器的樣子~
說完了示教器,我們來聊一聊控制系統,控制系統是整個系統的指揮中心,現在市面上控制系統有三種架構:基于IPC的總線式開放控制架構、PC+運動控制卡的分離架構以及高度集成的控制架構。
其中,基于IPC的總線式開放控制架構目前使用較多,優勢在于易于擴展,實時性好;PC+運動控制卡的分離架構則稍遜,其拓展性弱,系統笨重且繁瑣;而高度集成的控制架構則主要適用于小型機器人系統。控制系統的實現基本要靠一行行的代碼來實現,其內部包括了底層驅動、建模、運動學、動力學、軌跡規劃、任務規劃等非常復雜的code。
最后,我們來說說機器人本體,它就像人的胳膊或腿,它是一個執行機構,它接收來自機器人控制系統的指令,千萬別以為本體只是個執行器,本體中的電機和減速機可都是機器人本體的核心零部件,尤其是減速機。
說了這么多,那么工業機器人的應用場景有哪些呢?
在眾多的制造業領域中,工業機器人應用最為廣泛的領域是汽車及汽車零部件制造業,并不斷向其他領域擴展,如機械加工行業、電子電氣行業、橡膠及塑料工業、食品工業、木材和家具制造業等領域中。
在工業生產中,焊接機器人、激光加工機器人、噴涂機器人、搬運機器人、機床機器人、沖壓機器人、真空機器人等工業機器人都已被大量采用。
簡介工業機器人的分類與控制系統
一、工業機器人的分類
1. 按操作機坐標形式可分為:
(1)直角坐標型工業機器人
其運動部分由三個相互垂直的直線移動(即PPP)組成,其工作空間圖形為長方形。它在各個軸向的移動距離,可在各個坐標軸上直接讀出,直觀性強,易于位置和姿態的編程計算,定位精度高,控制無耦合,結構簡單,但機體所占空間體積大,動作范圍小,靈活性差,難與其他工業機器人協調工作。
(2)圓柱坐標型工業機器人
其運動形式是通過一個轉動和兩個移動組成的運動系統來實現的,其工作空間圖形為圓柱,與直角坐標型工業機器人相比,在相同的工作空間條件下,機體所占體積小,而運動范圍大,其位置精度僅次于直角坐標型機器人,難與其他工業機器人協調工作。
(3)球坐標型工業機器人
又稱極坐標型工業機器人,其手臂的運動由兩個轉動和一個直線移動(即RRP,一個回轉,一個俯仰和一個伸縮運動)所組成,其工作空間為一球體,它可以作上下俯仰動作并能抓取地面上或教低位置的協調工件,其位置精度高,位置誤差與臂長成正比。
(4)多關節型工業機器人
又稱回轉坐標型工業機器人,這種工業機器人的手臂與人一體上肢類似,其前三個關節是回轉副(即RRR),該工業機器人一般由立柱和大小臂組成,立柱與大臂見形成肩關節,大臂和小臂間形成肘關節,可使大臂做回轉運動和俯仰擺動,小臂做仰俯擺動。其結構最緊湊,靈活性大,占地面積最小,能與其他工業機器人協調工作,但位置精度教低,有平衡問題,控制耦合,這種工業機器人應用越來越廣泛。
(5)平面關節型工業機器人
它采用一個移動關節和兩個回轉關節(即PRR),移動關節實現上下運動,而兩個回轉關節則控制前后、左右運動。這種形式的工業機器人又稱(SCARA(Seletive Compliance Assembly Robot Arm)裝配機器人。在水平方向則具有柔順性,而在垂直方向則有教大的剛性。它結構簡單,動作靈活,多用于裝配作業中,特別適合小規格零件的插接裝配,如在電子工業的插接、裝配中應用廣泛。
2. 按驅動方式可分為:
(1)氣動式工業機器人
這類工業機器人以壓縮空氣來驅動操作機,其優點是空氣來源方便,動作迅速,結構簡單造價低,無污染,缺點是空氣具有可壓縮性,導致工作速度的穩定性較差,又因氣源壓力一般只有6kPa左右,所以這類工業機器人抓舉力較小,一般只有幾十牛頓,最大百余牛頓。
(2)液壓式工業機器人
液壓壓力比氣壓壓力高得多,一般為70kPa左右,故液壓傳動工業機器人具有較大的抓舉能力,可達上千牛頓。這類工業機器人結構緊湊,傳動平穩,動作靈敏,但對密封要求較高,且不宜在高溫或低溫環境下工作。
(3)電動式工業機器人
這是目前用得最多的一類工業機器人,不僅因為電動機品種眾多,為工業機器人設計提供了多種選擇,也因為它們可以運用多種靈活控制的方法。早期多采用步進電機驅動,后來發展了直流伺服驅動單元,目前交流伺服驅動單元也在迅速發展。這些驅動單元或是直接驅動操作機,或是通過諸如諧波減速器的裝置來減速后驅動,結構十分緊湊、簡單。
二、工業機器人控制系統
1. 工業機器人的控制技術
是在傳統機械系統的控制技術的基礎上發展起來的,因此兩者之間并無根本的不同但工業機器人控制系統也有許多特殊之處。其特點如下:
工業機器人有若干個關節,典型工業機器人有五六個關節,每個關節由一個伺服系統控制,多個關節的運動要求各個伺服系統協同工作。
工業機器人的工作任務是要求操作機的手部進行空間點位運動或連續軌跡運動,對工業機器人的運動控制,需要進行復雜的坐標變換運算,以及矩陣函數的逆運算。
工業機器人的數學模型是一個多變量、非線性和變參數的復雜模型,各變量之間還存在著耦合,因此工業機器人的控制中經常使用前饋、補償、解耦和自適應等復雜控制技術。
較高級的工業機器人要求對環境條件、控制指令進行測定和分析,采用計算機建立龐大的信息庫,用人工智能的方法進行控制、決策、管理和操作,按照給定的要求,自動選擇最佳控制規律。
2. 工業機器人的控制系統發基本要求:
實現對工業機器人的位置、速度、加速度等控制功能,對于連續軌跡運動的工業機器人還必須具有軌跡的規劃與控制功能。
方便的人---機交互功能,操作人員采用直接指令代碼對工業機器人進行作用指示。使用工業機器人具有作業知識的記憶、修正和工作程序的跳轉功能。
具有對外部環境(包括作業條件)的檢測和感覺功能。為使工業機器人具有對外部狀態變化的適應能力,工業機器人應能對諸如視覺、力覺、觸覺等有關信息進行測量、識別、判斷、理解等功能。在自動化生產線中,工業機器人應用與其它設備交換信息,協調工作的能力。
3. 工業機器人控制系統的分類:
工業機器人控制系統可以從不同角度分類,如控制運動的方式不同,可分為關節控制、笛卡爾空間運動控制和自適應控制;按軌跡控制方式的不同,可分為點位控制和連續軌跡控制;按速度控制方式的不同,可分為速度控制、加速度控制、力控制。
程序控制系統,給每個自由度施加一定規律的控制作用,機器人就可實現要求的空間軌跡。
自適應控制系統,當外界條件變化時,為保證所要求的品質或為了隨著經驗的積累而自行改善控制品質,其過程是基于操作機的狀態和伺服誤差的觀察,再調整非線性模型的參數,一直到誤差消失為止。這種系統的結構和參數能隨時間和條件自動改變。
人工智能系統,事先無法編制運動程序,而是要求在運動過程中根據所獲得的周圍狀態信息,實時確定控制作用。當外界條件變化時,為保證所要求的品質或為了隨著經驗的積累而自行改善控制品質,其過程是基于操作機的狀態和伺服誤差的觀察,再調整非線性模型的參數,一直到誤差消失為止。這種系統的結構和參數能隨時間和條件自動改變。因而本系統是一種自適應控制系統。
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
人工智能
+關注
關注
1791文章
47183瀏覽量
238255 -
工業機器人
+關注
關注
91文章
3360瀏覽量
92624
原文標題:純干貨!工業機器人系統全解析!
文章出處:【微信號:robotn,微信公眾號:產業大視野】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論