 激光雷達與雷達:詳細對比
激光雷達與雷達:詳細對比
我最近談到雷達和激光雷達之間的差異。我給出了有關雷達的通用答案,其分辨率和準確度均高于雷達。雷達具有更長的射程和更好的灰塵和煙霧條件。
當提示為什么雷達不太準確和較低的分辨率時,我被問到為什么。我有點嘟through了一下關于波長的回應;然而我沒有很好的回應,所以這篇文章將是我更好的回應。
LIDAR
LIDAR是光檢測和測距的簡稱,它使用激光器發射并接收回傳感器。在大多數用于測繪(和自行駕駛車輛)的LIDAR傳感器中,計算發射和接收之間的時間以確定飛行時間(ToF)。知道波浪返回的光速和(1/2的時間)(因為信號傳出和返回),我們可以計算出物體離光線有多遠的距離,從而使光線反射回來。該值是傳感器報告的范圍信息。LIDAR通常使用近紅外光,可見光(但不是真正可見的)和紫外光譜。
有一些傳感器使用三角測量來計算位置(而不是ToF)。這些通常是高精度,高分辨率的傳感器。這些傳感器非常適合驗證裝配線上的組件或檢查航天飛機上的熱瓦損壞。但是,這不是這篇文章的重點。
LIDAR數據。頂部顯示反射率數據。底部顯示距離數據的亮點越遠。[來源]
激光束也可以聚焦成具有很小的光斑尺寸,不會擴大很多。這個小光斑大小可以幫助提供高分辨率。如果您有旋轉鏡(通常是這種情況),那么您可以在每度左右(基于指向機制的精確度)拍攝激光,以提高分辨率。LIDAR在0.25度角分辨率下工作并不罕見。
雷達
雷達是無線電探測和測距的縮寫,它使用無線電波來計算速度和/或距離。無線電波與物體接觸時的光波吸收較少(衰減較小),所以它們可以在較長的距離上工作。正如您在下面的圖片中看到的那樣,RF波的波長比激光雷達波大。不利的一面是,如果一個物體比正在使用的RF波小得多,物體可能不能反射足夠的能量來檢測。出于這個原因,許多雷達用于障礙探測將是“高頻”,因此波長更短(因此我們為什么經常在機器人中使用毫米波),并可以探測到較小的物體。然而,由于激光雷達的波長明顯較小,它們通常仍然具有更好的分辨率。
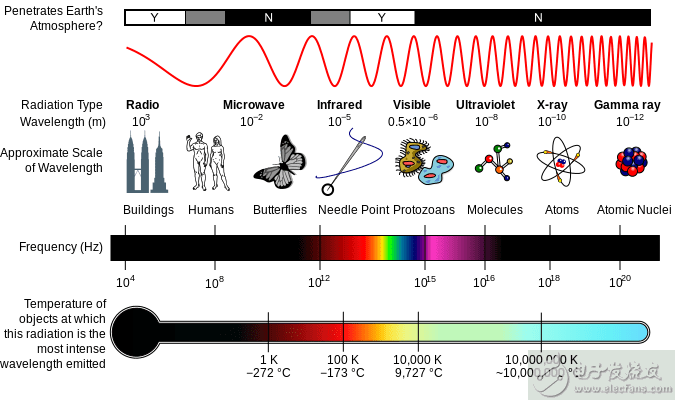
電磁頻譜在雷達左側一直顯示無線電波,LIDAR的右側顯示近紅外/可見/紫外波。
資料來源:美國國家航空航天局的Inductiveload [GFDL(http://www.gnu.org/copyleft/fdl.html),通過維基共享資源
我所見過的大多數RADAR的視野都很窄(10度),然后只返回一個值(或者它們可能有幾十個通道,參見下面的多模雷達),其范圍為檢測到的物體。一些系統可以使用多個通道來獲取距離測量的角度。角度不會像大多數LIDAR那樣高。市場上還有一些雷達用于掃描以獲得多種測量結果。這兩種方法是一種旋轉天線(例如您在機場或船上看到的)或電子“旋轉”,這是一種使用多個內部天線而沒有移動部件的設備。更高級的(更新的)RADAR可以完成跟蹤多個對象的任務。在很多情況下,它們實際上不會返回勾畫物體的點(如激光雷達),但會將范圍,方位和速度(范圍速率)返回到檢測到的物品的估計質心。如果多個物體彼此靠近,傳感器可能會將它們混淆為一個大物體并返回一個質心范圍[這里是閱讀的來源和一個很好的參考]。
使用多普勒頻移,物體的速度也可以用相對較少的計算量輕松確定。如果RADAR傳感器和檢測到的物體都在移動,那么您將獲得兩個物體之間的相對速度。
![[資源]](http://file.elecfans.com/web1/M00/50/3E/pIYBAFrwQVmAd9jGAAFHLebpPxw888.png?resize=600%2C431)
[來源]
使用雷達時,通常有兩種操作模式:
1.飛行時間- 這與上述LIDAR傳感器類似,然而它使用無線電波脈沖進行飛行時間計算。由于傳感器是脈沖式的,所以知道脈沖何時被發送,因此計算范圍可以比連續波傳感器更容易(如下所述)。傳感器的分辨率可以通過改變脈沖寬度和聽取響應的時間長度(回擊)來調整。這些傳感器通常具有固定的天線,導致視野小(與LIDAR相比)。
有一些系統將多個ToF無線電波合并成一個具有不同脈沖寬度的封裝。這將允許以更高的準確度檢測各種范圍。這些有時稱為多模雷達
2.連續波- 這種方法頻率調制(FMCW)波,然后將反射信號的頻率與發射信號進行比較以確定頻移。該頻移可以用來確定反射它的物體的范圍。物體離傳感器越遠(在一定范圍內)越大。計算頻移和相應的范圍在計算上比ToF更容易,再加上電子設備更容易,更便宜。這使得連續調頻系統非常流行。另外,由于經常使用單獨的發射和接收天線,所以這種方法可以連續地同時發射和接收;不同于需要傳輸的脈沖ToF方法,然后等待響應。
還有另一種版本的連續波雷達,其波形沒有被調制。這些系統價格便宜,可以利用多普勒效應快速檢測速度,但它們無法確定范圍。在范圍不重要的情況下,他們經常被警察用來檢測車速[維基百科]。
SONAR
不相關,但是當我們查看上面的頻譜時,我應該注意到聲納或聲音導航和測距可以在兩種模式下工作,如雷達。所用的波長比RADAR更大。它在前面顯示的光譜圖像的左側偏離圖表。
我應該指出,有很酷的成像聲納傳感器。總的想法是,您可以使感測波垂直,使水平分辨率非常精細(<1度),垂直分辨率更大(10+度)。然后,您可以將這些光束中的許多相互靠近放置在傳感器封裝中。有類似的軟件包可以用小波長的雷達來實現這一點。
成本
$$$
由于以下幾個原因,LIDAR傳感器比RADAR傳感器成本更高:
1.使用ToF的LIDAR需要高成本的電子設備,成本更高
2. LIDAR傳感器需要CCD接收器,光學器件,電機和激光器來產生和接收所使用的波。雷達只需要一些固定天線。
3. LIDAR傳感器具有旋轉部件進行掃描。這需要電機和編碼器。雷達只需要一些固定天線。(我知道這有些類似于上面的行)。
計算地說話
由于RADAR傳感器只返回一個點或幾十個點,因此往往會產生更少的數據。當傳感器是多通道時,它通常只是將范圍/速度返回到幾個質心(ish)物體。激光雷達傳感器正在發送大量有關距離數據的每個激光點的數據。然后由用戶決定是否有用。使用RADAR你有一個簡單的號碼,但這個號碼可能不是最好的。利用LIDAR,它取決于機器人技術人員生成算法來檢測各種物體并辨別傳感器正在查看的內容。
如果你的目標是在你面前探測一輛汽車(或朝你駕駛)并獲得它的速度,雷達可能會很棒。如果您試圖確定物品的準確位置,生成表面貼圖或找到小型柵欄,LIDAR可能會做得更好。請記住,如果您在灰塵或雨中,激光雷達可能會在傳感器附近返回一點點云(因為它會讀取所有這些粒子/滴)。而雷達可能會做得更好。
-
激光雷達
+關注
關注
968文章
3967瀏覽量
189828 -
LIDAR
+關注
關注
10文章
326瀏覽量
29414
發布評論請先 登錄
相關推薦
激光雷達,明年要降價至200美元

激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達在農業中的創新應用
激光雷達技術的發展趨勢
光學雷達和激光雷達的區別是什么
激光雷達點云數據包含哪些信息
一文看懂激光雷達

基于FPGA的激光雷達控制板

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

華為詳細解讀激光雷達
激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論