 討論低噪聲、低功耗加速度計ADXL355的振動校正
討論低噪聲、低功耗加速度計ADXL355的振動校正
導航和AHRS系統
機器健康狀況檢測的振動監控
基礎設施的結構健康狀況監控和平臺穩定
井下定向鉆探的傾斜監控
施工行業平路機和勘測設備的調平
吊車穩定系統吊桿傾角測量的高精度傾角計
……
它們,都需要高性能 MEMS 加速度計來提供低成本解決方案!
一般,加速度計會經受不同幅度的振動,但上述這些應用的另一個不同方面是振動的頻率成分。振動與傳感器和系統誤差源相結合可能導致振動校正,這是高性能加速度計的一個重要指標。
本文將告訴你們——
? MEMS 加速度計中的振動校正是如何發生的?
? 測量振動校正需要知道的參數以及使用的技術。
作為案例研究,文中會討論低噪聲、低功耗加速度計ADXL355的振動校正。ps.低振動校正誤差以及所有其他特性,使這款器件成為上述精密應用的理想之選。
振動校正的來源
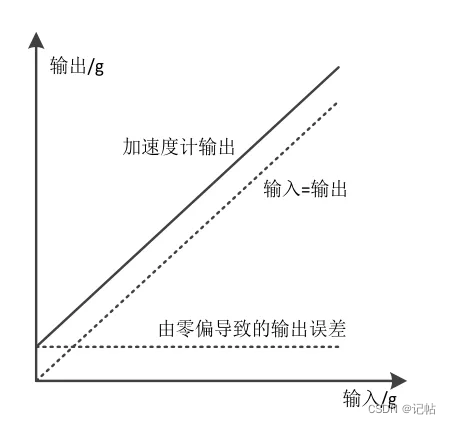
振動校正誤差 (VRE) 是加速度計對交流振動(被整流為直流)的響應,表現為加速度計失調的異常偏移。在傾角計等應用中,這是一個重大誤差源,因為加速度計的直流輸出是目標信號,失調的任何改變都可能被錯誤地解讀為傾角變化,導致誤差一路向下傳遞,從而引起安全系統誤觸發、平臺穩定或鉆桅對準機制過度補償等。
VRE 高度依賴于加速度計所經受的振動特性曲線,不同應用施加于加速度計的振動模式會不同,因而 VRE 可能不同。振動校正有多種發生機制,本文討論其中的兩種。
非對稱軌重力產生一個靜態 1 g (9.8 m/s2) 加速度場,當加速度計敏感軸豎直對齊時,其測量范圍會有一個偏移。2 g 滿量程范圍的傳感器與重力加速度對齊時,將只能測量 1 g 峰值振動,否則響應會被削波。超過 1 g 的對稱激勵信號的平均值將不為零,原因是在經受額外 1 g 加速度的方向上,電平會被削波。
圖 1 中,一個激勵振動信號施加于 2 g 滿量程傳感器上。當振動為 0.3 g rms(300到600樣本之間)時,失調沒有可觀測的偏移。然而,當振動為 1 g rms(600到1000樣本之間)時,VRE約為 –100 mg。
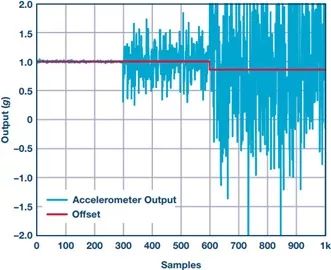
圖1. ±2 g滿量程范圍的加速度計因為非對稱削波而產生的振動校正圖解
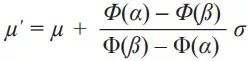
VRE 可建模為一個截斷分布的平均偏移,受加速度計滿量程范圍的限制。當傳感器在 1 g 場中經受隨機振動時,輸入激勵信號可建模為一個平均值 μ= 1 g 且標準差 σ= X 的正態分布,其中X表示輸入振動幅度均方根值。傳感器輸出建模為雙截斷正態分布,輸出值下界和上界分別為–R和+R,其中R為傳感器的最大范圍。此雙截斷正態分布的平均值計算如下:
其中,
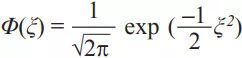
為概率密度函數,
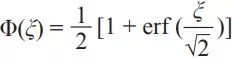
為其累積分布函數。
α和 β 被定義為
這樣 VRE 即為:
非線性誤差是指工作范圍內加速度計輸出與最佳擬合直線的偏差。此偏差常常用滿量程輸出范圍的百分比表示。加速度計的非線性誤差可能引起 VRE。
描述加速度計非線性的常見模型是n次多項式。輸出ao (LSB)可表示為輸入ai (g)的函數:

其中:
K0:失調 (LSB)
K1:比例因子 (LSB/g)
Kn:非線性的n次項系數,n=2,3, … (LSB/gn)
考慮一個簡單的正弦輸入加速度:

此輸入的時間平均值為零。加速度計的輸出可表示為:

時間平均輸出等于上式右側所有分量的時間平均值之和。奇數次項的平均值為零。帶入偶數次項的平均值
輸出的時間平均值即為:

其中Grms為輸入加速度的均方根值。上式說明,在一個正弦振動的情況下,二次非線性轉換為直流失調的偏移 (K2Grms2)。
 代表振動校正系數 (VRC),單位為 μg/g2-rms。
代表振動校正系數 (VRC),單位為 μg/g2-rms。
振動校正的幅度和頻率相關性
振動幅度很小時,VRE 以傳感器非線性為主,可用 VRC 來表示: VRE = VRC × vib2rms。然而,當振動幅度大于滿量程范圍時,VRE 往往以上一部分所述的非對稱削波為主。另外,正如之前提到的,加速度計輸出的任何非零失調也會引起非對稱削波。大多數針對工業應用而設計的MEMS 加速度計都會內置故障安全電路,在有很大振動時,它會關閉傳感器偏置電路,防止檢測元件受損。振動幅度很大時,此特性可能會在失調中進一步引起異常偏移,使 VR E惡化。
由于各種諧振和器件中的濾波器,VRE 常常具有很強的頻率相關性。由于諧振器的兩極響應,在傳感器的諧振頻率下,MEMS 傳感器諧振會放大振動,放大比率等于諧振品質因數,而在頻率較高時則會抑制振動。諧振品質因數較高的傳感器,振動幅度越大,其VRE也越大。由于高頻帶內振動的積分效應,較大的測量帶寬也會引起較高的VRE。信號處理電路中實現的模擬和數字濾波器可抑制輸出端的帶外振動峰值和諧波,但對 VRE 沒有明顯作用,原因是振動輸入被偶數次非線性整流為直流信號。
測量振動校正
一旦將加速度計部署于現場,便無法實時補償 VRE。在有些應用中,振動引起失調中出現較小直流偏移是可以容忍的,對此可以測量 VRE 以估計加速度計輸出中的誤差,從而確定 VRE 是否在允許限度內。在任何振動測量中,振動臺和試驗夾具必須平齊,并且必須使用精密振動臺以抑制振動臺跨軸振動、偏移和結構諧振引起的誤差。另外,試驗夾具必須具有適當的剛度,確保夾具諧振頻率離加速度計帶寬和振動曲線頻段很遠。最優夾具設計的最低諧振頻率應當比最高振動頻率高出大約 50%。
正弦振動特性曲線
正弦振動方法是最常用且現有文獻討論最多的方法,已被納入 IEEE標準 1293-1998。一般程序是將一個正弦振動輸入施加于加速度計,然后測量失調偏移與均方根振動幅度(vibrms)的關系。VRC 可以通過對此數據應用最小二乘法來估算:

由于可以很好地控制幅度,并且可以確保加速度計不會削波,因此通過這種方法能夠精確測量 VRC。這種測試還能用來識別并量化器件諧振對 VRE 的影響。然而,它一次只能測試一個頻率,而要充分衡量傳感器性能,必須分別測試加速度計帶寬范圍內的多個頻率。
隨機振動特性曲線
VRE 也可以利用隨機振動輸入來測量。通常,實際的振動不像正弦振動特性曲線那樣呈周期性或可預測,因此通過這種方法可以衡量加速度計在大部分應用中的性能。通過量化寬頻率范圍內寬帶激勵的失調偏移,這種方法更適合于同時納入所有擾頻并激勵所有器件諧振。然而,它不保證峰峰值振動幅度,故而獲得的VRE為頻率范圍上的平均值。
圖 2 比較了配置為 ±2 g 范圍的 ADXL355 Z 軸傳感器的截斷平均值模型與實測VRE。測量中,Z 軸與重力(1 g場)對齊,利用 Unholtz-Dickie 振動臺施加一個隨機振動特性曲線(50 Hz至2 kHz頻段)。利用一個參考加速度計(PCB Piezotronics 352C23型)測量振動幅度;當振動幅度提高到滿量程范圍以上時,測量失調偏移。截斷平均值模型(擬合到2.5 g截斷)與測量結果擬合得很好。由于機械傳感器開銷和輸出帶寬限制(測量數據中的加速度計帶寬為1kHz,但模型不考慮帶寬),截斷相對于設置的滿量程范圍預計會有偏差。當振動水平達到8 g時,±2 g范圍的超范圍保護電路就會激活。高斯分布振動的波峰因數約為3,因此超過2.5 g rms后,實測性能開始明顯偏離模型。
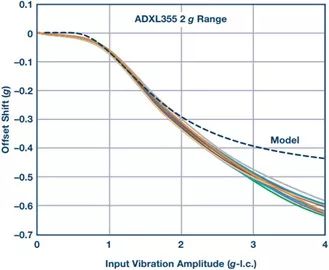
圖2. 截斷平均值擬合與 ADXL355 實測振動校正的比較
影響VRE的其他因素
MEMS 傳感器諧振會影響加速度計的振動校正。高質量因數會導致頻率接近傳感器諧振頻率的振動信號被放大,引起較大 VRE。這可以通過比較 ADXL355(±8 g范圍、1 kHz帶寬)的 Z 軸傳感器與X軸和Y軸傳感器的VRE性能得知;圖 3 顯示X軸和Y軸傳感器的 VRE在 3 g rms 左右達到峰值,因為其 Q 高于 Z 軸傳感器。
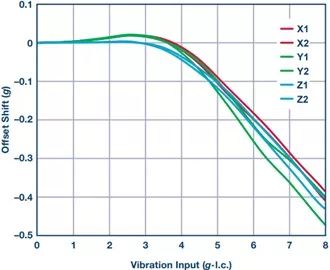
圖3. 在 ADXL355 的兩個 DUT 中,高 Q(X軸、Y軸)和低 Q(Z軸)傳感器的 VRE 比較
使用不必要的較大帶寬時,也會導致加速度計對較高頻率成分求均值,從而對 VRE 產生不利影響。圖4反映了這一點,其比較了 ADXL355 DUT(±2 g范圍)的 Y 軸傳感器在兩種不同帶寬設置下的 VRE。125 Hz 帶寬設置的 VRE 顯著低于1 kHz帶寬設置的VRE。
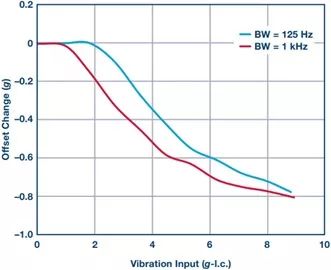
圖4. 1 g 場中 ADXL355 的 Y 軸傳感器(±2 g范圍)在兩種不同帶寬設置(125 Hz和1 kHz)下的VRE
結語
為加速度計選擇合適的帶寬以抑制高頻振動,可以避免很多振動相關問題。通過放大諧振時的振動耦合,包裝因素(如封裝和安裝諧振)也會影響 VRE。確保封裝有適當的剛度,讓封裝和安裝諧振頻率位于加速度計帶寬之外,是實現良好振動校正性能的關鍵。
總之,振動校正誤差是 MEMS 加速度計的一個重要指標,設計利用 MEMS 加速度計在高振動環境中進行直流測量時,應當考慮這種效應。
-
ADI
+關注
關注
146文章
45819瀏覽量
249754 -
mems
+關注
關注
129文章
3924瀏覽量
190581 -
低功耗
+關注
關注
10文章
2396瀏覽量
103675 -
adxl355
+關注
關注
0文章
7瀏覽量
6715
原文標題:ADI 深度丨從一份案例研究 MEMS 加速度計的振動校正
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS加速度計的工作原理是什么
EPSON工業級加速度計選型

請問比LIS3DH更穩定的超低功耗加速度計有哪些可選擇?
三軸加速度計LIS2DUX12開發(2)----靜態校準






 工商網監
工商網監
評論