") 英偉達(dá)發(fā)表AI新研究:機(jī)器人即完美復(fù)制人類演示
英偉達(dá)發(fā)表AI新研究:機(jī)器人即完美復(fù)制人類演示
導(dǎo)讀: 英偉達(dá)在澳大利亞布里斯班舉行的機(jī)器人與自動(dòng)化國際會(huì)議(ICRA)上發(fā)表了一項(xiàng)新的研究工作,其中包括訓(xùn)練機(jī)器人從人類執(zhí)行任務(wù)中學(xué)習(xí)。
英偉達(dá)在澳大利亞布里斯班舉行的機(jī)器人與自動(dòng)化國際會(huì)議(ICRA)上發(fā)表了一項(xiàng)新的研究工作,其中包括訓(xùn)練機(jī)器人從人類執(zhí)行任務(wù)中學(xué)習(xí)。
截止到目前,機(jī)器人都是被訓(xùn)練在一個(gè)與程序員隔離的環(huán)境中,執(zhí)行固定次數(shù)的指令。在演示中,英偉達(dá)使用了一些不同顏色的固體方塊,并按照固定模式堆疊它們,從而訓(xùn)練機(jī)器人復(fù)制執(zhí)行這一任務(wù)。
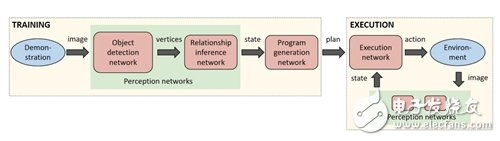
在演示中,被訓(xùn)練的神經(jīng)網(wǎng)絡(luò)序列成功地推斷出了方塊之間的關(guān)系,并開發(fā)了一個(gè)模擬所執(zhí)行任務(wù)的自動(dòng)化程序。
英偉達(dá)發(fā)布的視頻顯示,該系統(tǒng)使用英偉達(dá)Titan X GPU模擬了人類進(jìn)行的單一演示。由于程序引用了事件的當(dāng)前狀態(tài),因此,它成功地糾正了在實(shí)時(shí)執(zhí)行任務(wù)時(shí)犯下的錯(cuò)誤。
“攝像機(jī)獲取場景的實(shí)況視頻,并通過一對(duì)神經(jīng)網(wǎng)絡(luò)實(shí)時(shí)推斷場景中物體的位置和關(guān)系。由此產(chǎn)生的感知被送到另一個(gè)網(wǎng)絡(luò),產(chǎn)生一個(gè)計(jì)劃來解釋如何重建這些感知,”英偉達(dá)的博客中寫道。
該研究旨在降低重新編程機(jī)器人執(zhí)行一組任務(wù)所涉及的成本。該研究的首席科學(xué)家Stan Birchfield說:“我們感興趣的是,讓非專家用戶通過簡單地告訴機(jī)器人做什么,來教會(huì)機(jī)器人執(zhí)行新任務(wù)。”
通過這項(xiàng)研究,英偉達(dá)加入了包括谷歌和SRI在內(nèi)的公司聯(lián)盟,這些公司正在AI領(lǐng)域取得巨大的進(jìn)展,并開發(fā)出智能且具有“常識(shí)”的AI系統(tǒng)。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28388瀏覽量
206923 -
AI
+關(guān)注
關(guān)注
87文章
30753瀏覽量
268901 -
英偉達(dá)
+關(guān)注
關(guān)注
22文章
3771瀏覽量
90991
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論