 機器人PLC簡單案例分析
機器人PLC簡單案例分析
一、設計思路
1、用PLC控制一維運動平臺實現電機的自動正反轉運行及手動正反轉運行;
2、一維運動平臺的行程兩端各有一行程開關,分別定義為正向限位和負向限位;
3、在電機自動正反轉運行前,需對電機進行復位。復位的過程是:啟動電機往負向運行,運行至負向限位后,往正向運行一段距離,將該位置作為電機自動正反轉運行的初始位置;
4、復位完成后,按下正轉按鈕,電機往正向運行一段距離(該距離通過運動包絡參數設定),到位后停止。按下反轉按鈕,電機往負向運行一段距離,到位后停止;
5、如正反轉運行過程中,觸動行程開關,電機停止運行。此時可通過手動正反轉按鈕控制電機運行離開限位開關,或按下復位按鈕對平臺重新復位;
6、觸動行程開關后,需重新復位才能進行自動正反轉運行控制;
7、在電機運行過程中,任何時刻均可通過“停止按鈕”和“急停按鈕”控制其停止運行;
8、停止運行后,需重新復位才能進行自動正反轉運行控制;
9、“復位指示燈”、“運行指示燈”和“停止指示燈”用來指示一維平臺的運行狀態。
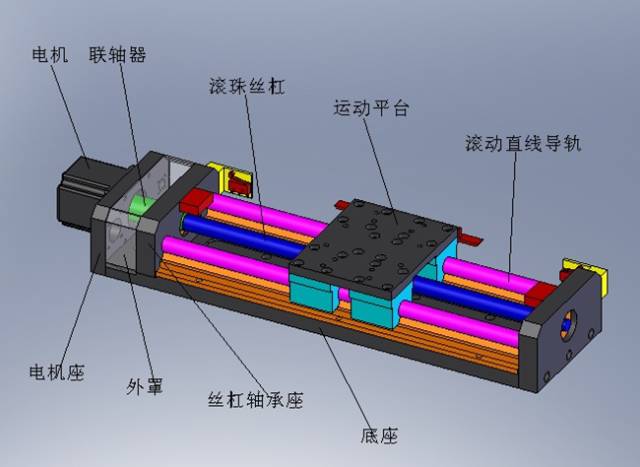
二、機械本體
三、硬件電路
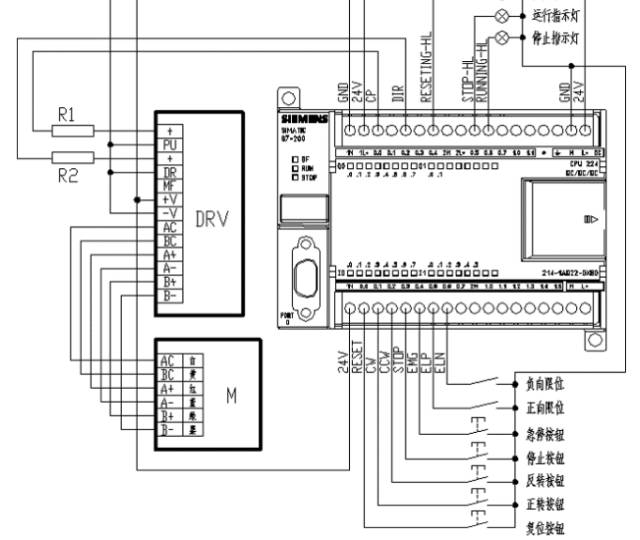
S7-200 CPU提供兩個高速脈沖輸出點(Q0.0和Q0.1),可以分別工作在PTO(脈沖串輸出)和PWM(脈寬調制)狀態下。使用PTO或PWM可以實現速度、位置的開環運動控制。
PTO功能可以輸出一串脈沖,用戶可以控制脈沖的周期(頻率)和個數。PWM功能可以連續輸出一串占空比可調的脈沖,用戶可以控制脈沖的周期和脈寬(占空比)。
高速脈沖輸出點和普通數字量輸出點共用輸出映像Q0.0和Q0.1。當在Q0.0和Q0.1上激活PTO或PWM功能時,PTO/PWM發生器對輸出擁有控制權,輸出波形不受其他影響。
只有晶體管輸出類型的CPU能夠支持高速脈沖輸出功能。
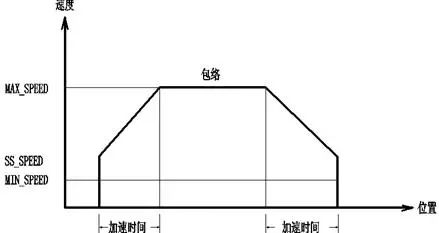
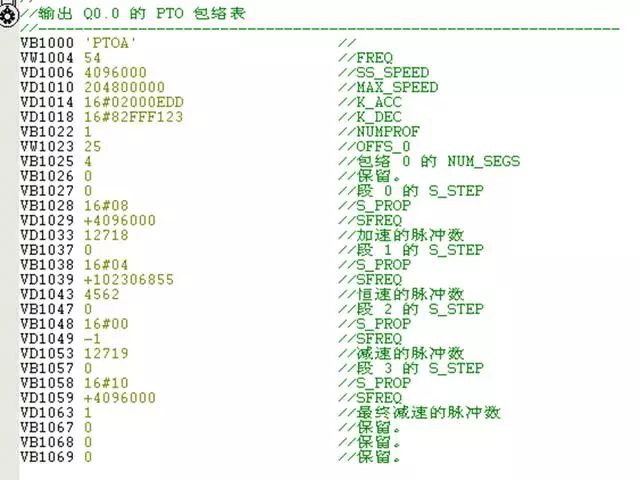
四、運動包絡
包絡(Profile)是一個預先定義的以位置為橫坐標,以速度為縱坐標的曲線,包絡是運動的圖形描述。
一個包絡由多段組成,每一段包含一個達到目標速度的加減速過程,和以目標速度勻速運行的一串指定數量的脈沖。如果是單段運動控制或者是多段運動控制的最后一段,還應該包括一個由目標速度到停止的減速過程。
PTO主要通過包絡來實現位置控制。位置控制想到通過參數設置來創建包絡,并用圖形方式顯示包絡曲線,自動生成位置控制用的子程序。
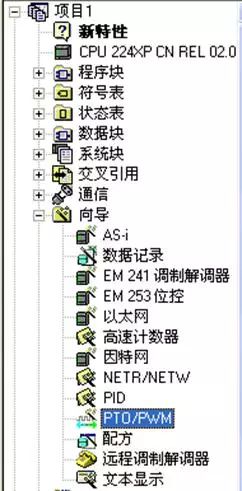
五、運動包絡設定步驟
在開始編寫程序前,首先設定運動包絡,步驟如下:
(1)雙擊左圖所示“向導—PTO/PWM”,出現“脈沖輸出向導”窗口。
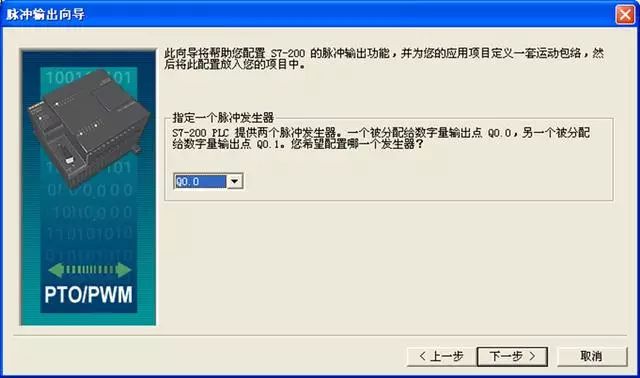
(2)選擇Q0.0,單擊“下一步”。
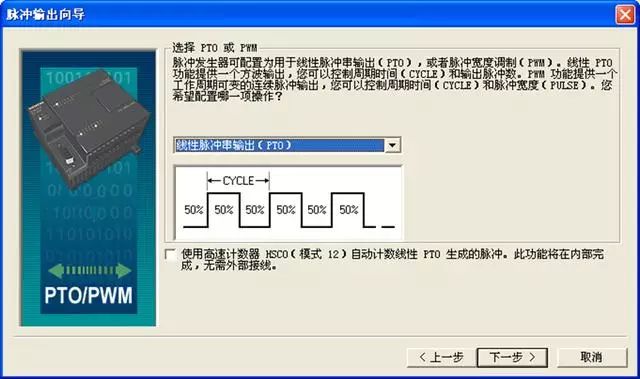
(3)選擇“線性脈沖串輸出(PTO)”,單擊“下一步”。
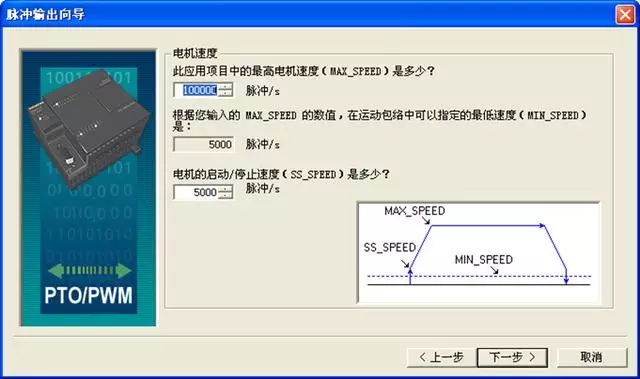
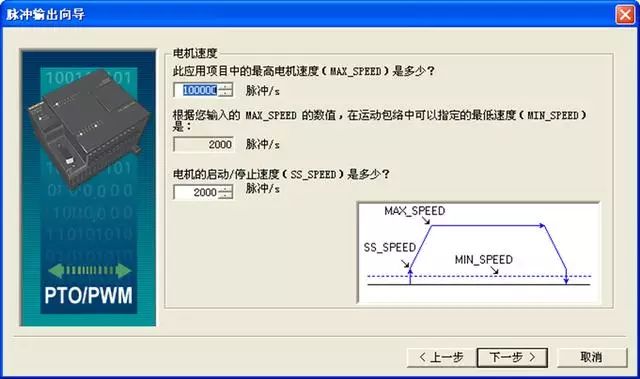
(4)設置項目中應用的電機最高速度、最低速度和電機啟動/停止速度。
(5)單擊“下一步”,設置加減速時間。
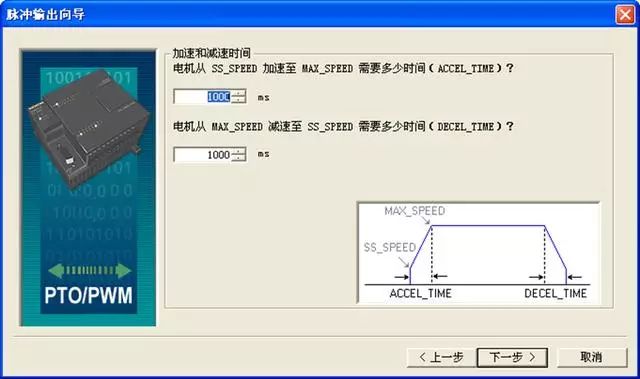
(6)單擊“下一步”。
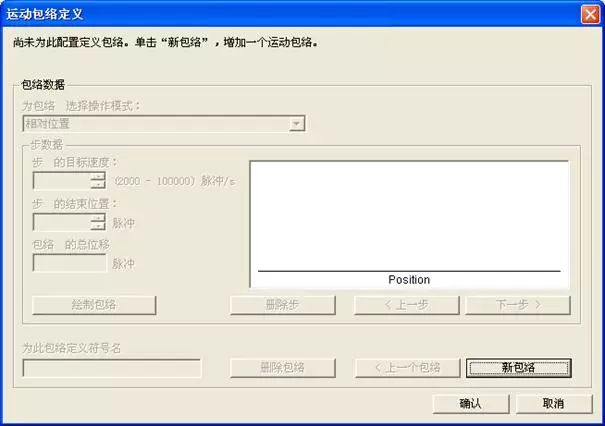
(7)點擊“新包絡”,選擇“是”。
(8)圖27灰色部分激活,在其中選擇“相對位置”,設置好參數,其中步0的目標位置不要設置太小,需大于加減速脈沖數之和。
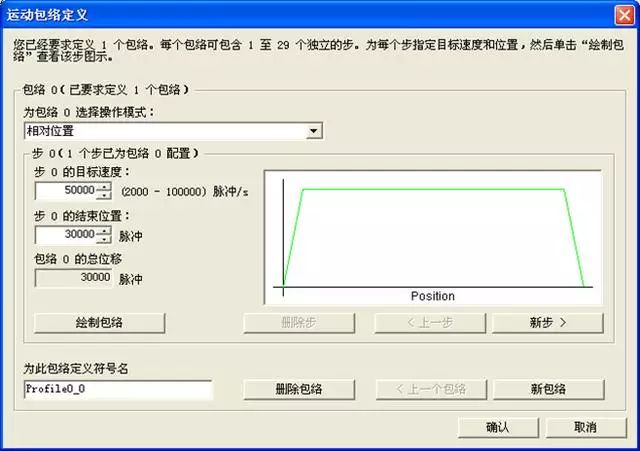
(9)單擊“確認”。
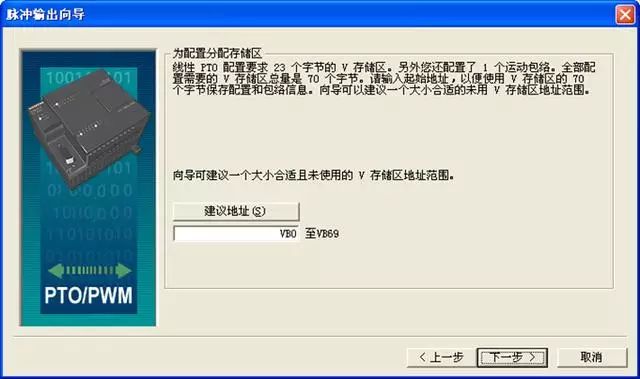
(10)將參數”VB0”更改為“VB1000”,需注意,不要在程序中再重復定義“VB1000—VB1069”;單擊“下一步”。
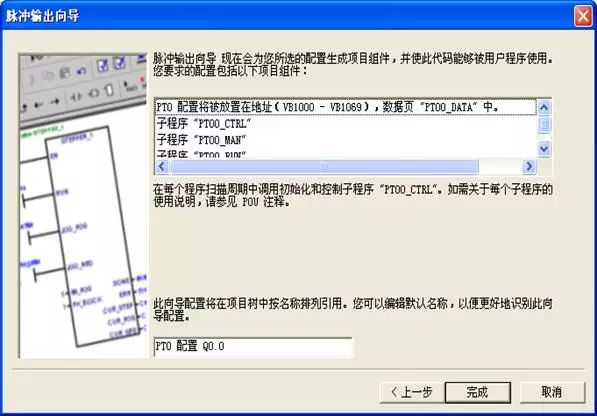
(11)單擊“完成”,在彈出的對話框中選擇“是”。
(12)運動包絡設置完成。在調用子程序中出現Q0.0對應的位控子程序。
六、PLC程序
1、上電初始化
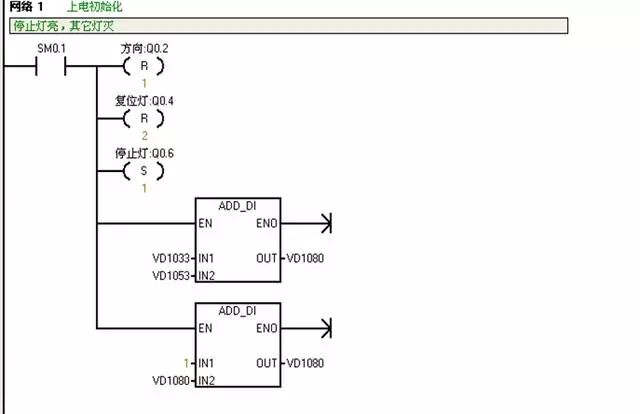
SM0.1:首次掃描周期時該位打開,用途是調用初始化子程序。
2、電機控制子程序和初始化
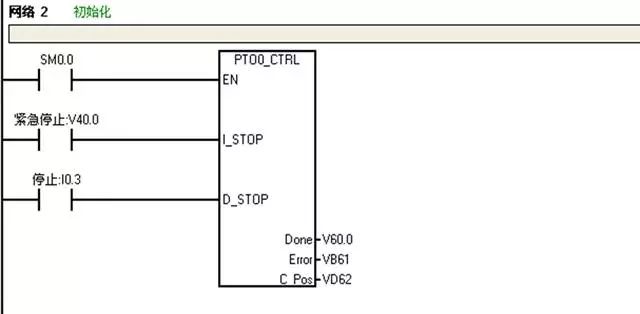
PTO0_CTRL在程序中只使用一次,并且在每次掃描時得到執行,所以使用SM0.0作為EN的輸入。請加微信公眾號:工業智能化(robotinfo) 馬云都在關注
EN:使能端,用SM0.0連接,保持常通;
I_STOP:有效時電機立即停止;
D_STOP:有效時電機減速停止;
Done:完成標志。為“1”時表明上一指令執行完成;
Error:顯示錯誤代碼,“0”表示無錯誤;
C_Pos:HSC計數器功能開啟時,表示運行脈沖數,否則為0。
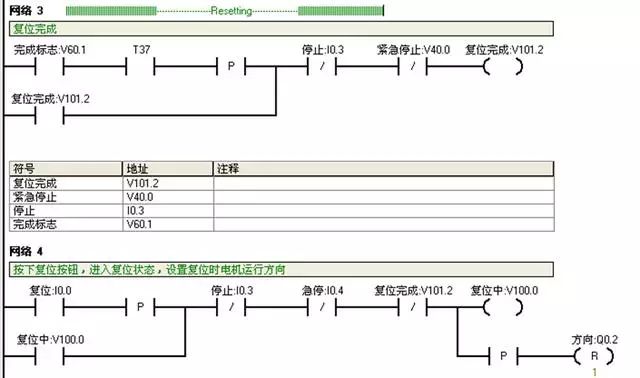
3、復位
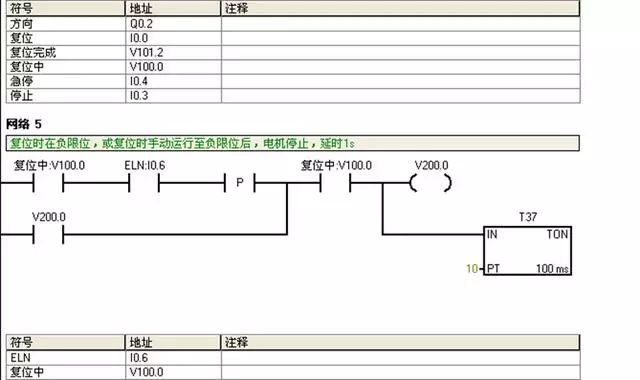
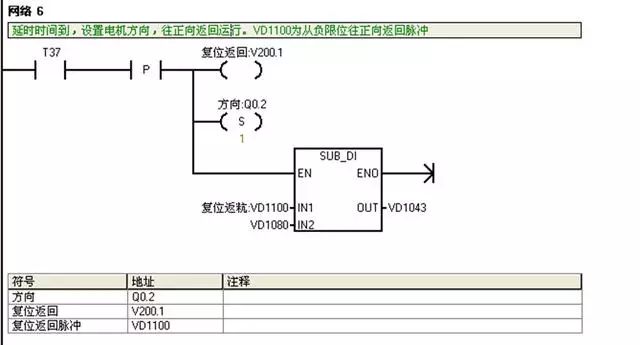
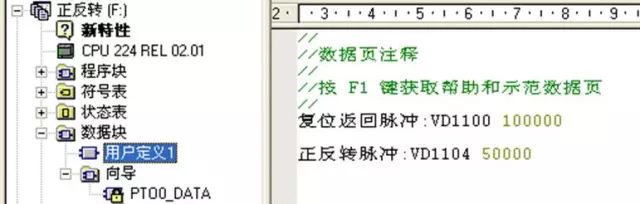
VD1100:復位返回脈沖數,在數據塊的“用戶定義1”進行設置。根據電機的減速比和驅動器的細分以及電機行程設置。
VD1043:運行包絡恒速段脈沖數;VD1100-VD1080= VD1043。
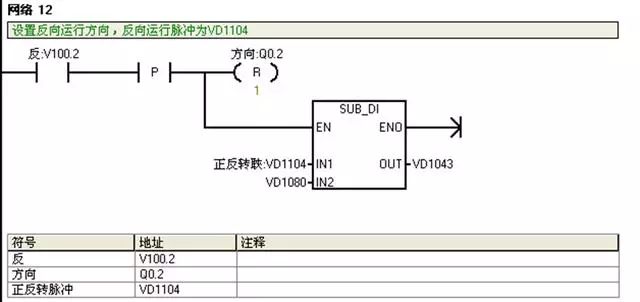
4、正轉
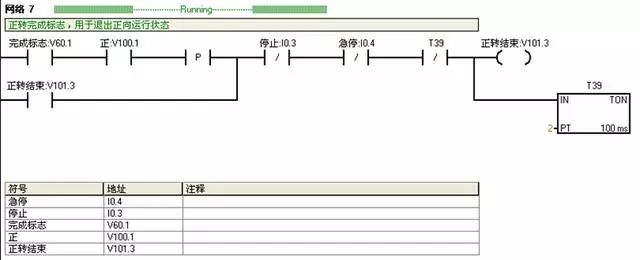
VD60.1:運動包絡運行完成標志,PTO0_CTRL中的“Done”參數;v100.1:正轉運行狀態;v101.3:正轉結束;
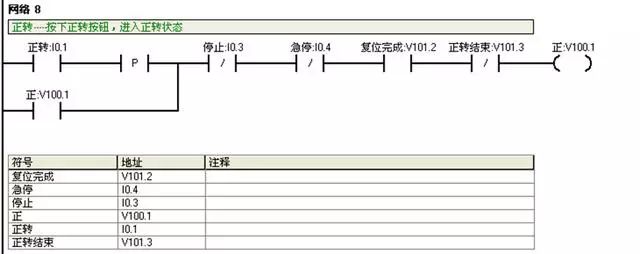
I0.1:正轉按鈕;
V100.1:正轉運行狀態;V101.2:復位完成標志。正反轉自動運行前必須復位完成;
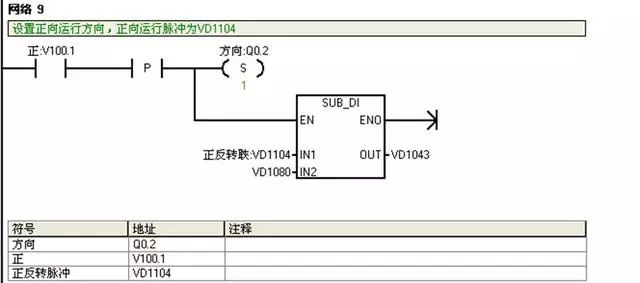
Q0.2:電機方向;
VD1104:正反轉脈沖數,同VD1100參數一樣,在“數據塊”的“用戶定義1”中設置.VD1104-VD1080= VD1043。
5、反轉
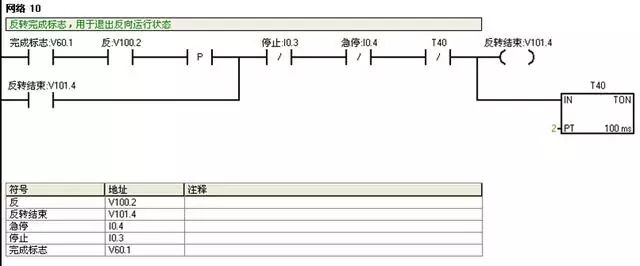
VD60.1:運動包絡運行完成標志,PTO0_CTRL中的“Done”參數;v100.2:反轉運行狀態;v101.4:反轉結束;
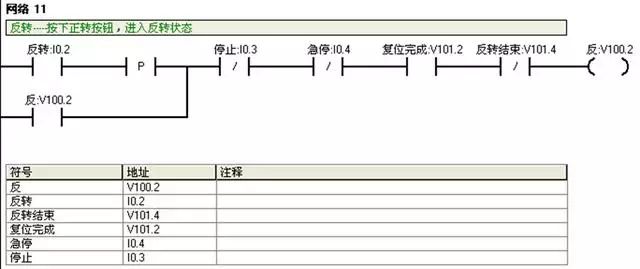
I0.2:反轉按鈕;V100.2:反轉運行狀態;V101.2:復位完成標志。正反轉自動運行前必須復位完成;
Q0.2:電機方向;
VD1104:正反轉脈沖數,同VD1100參數一樣,在“數據塊”的“用戶定義1”中設置。VD1104-VD1080= VD1043。
6、手動正轉
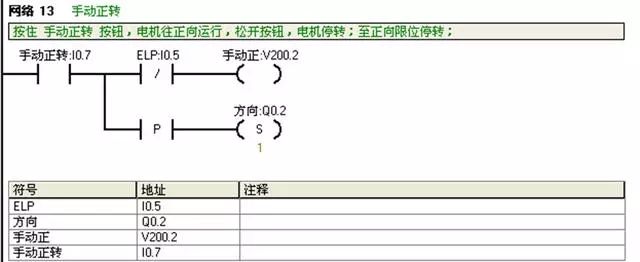
手動正轉是對電機的點動控制,需要一直按住按鈕,電機才能運行。運行至正限位后,即使按住按鈕也不能運行,只能反向運行。
7、手動反轉
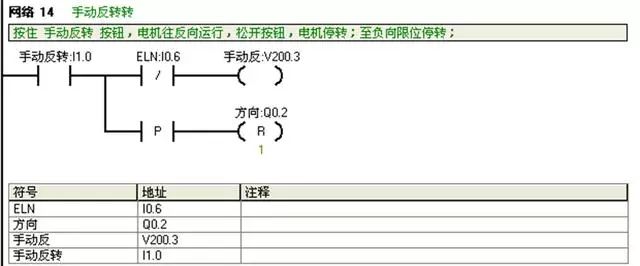
手動反轉是對電機的點動控制,需要一直按住按鈕,電機才能運行。運行至負限位后,即使按住按鈕也不能運行,只能正向運行。
8、緊急停止
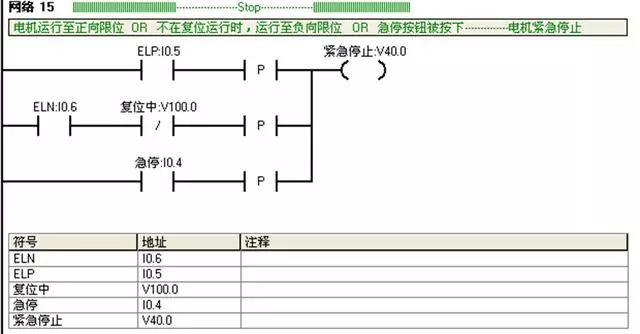
緊急停止:運行至正負限位時,對系統的保護策略。任何情況下,按下緊急停止按鈕,使系統緊急停止。
9、輸出
(1)、包絡運行
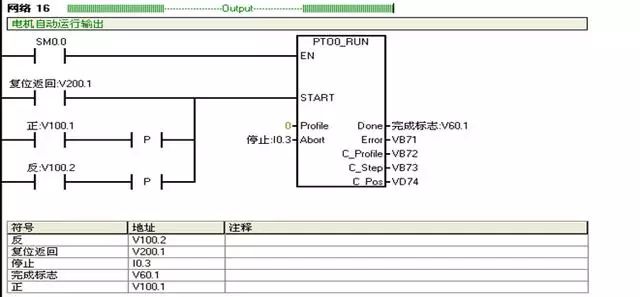
EN:使能端,用SM0.0鏈接表示保持常通;
START:參數開啟時,執行運動包絡,為確保命令只發送一次,使用上升沿信號;
Profile:設定的運動包絡編號;
Abort:位控模塊停止參數。開啟后停止運行當前包絡并減速停止;
Done:完成標志。模塊完成該子程序時,此參數為“1”;
Error:錯誤代碼,為“0”表示無錯誤;
C_Profile:包含位控模塊當前執行的輪廓;
C_Step:目前正在執行的輪廓步驟;
C_Pos:如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈沖數目表示的模塊;否則此數值始終 為0。
(2)、點動運行
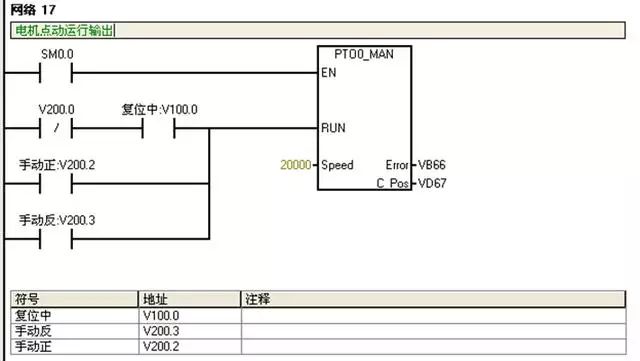
EN:使能端,SM0.0保持常通;
RUN:啟用該參數加速至設定速度運行,停用該參數電機減速停止;
Speed:設定手動運行的最高速度;
Error:本子程序的錯誤代碼,“0”表示無錯誤;
C_Pos:如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈沖數目表示的模塊;否則此數值始終為零。
(3)、指示燈
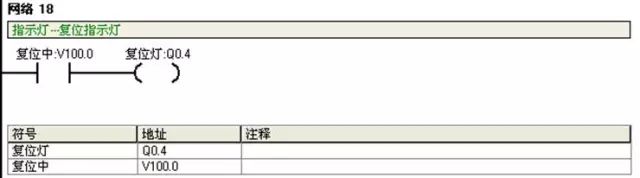
復位狀態下,復位指示燈亮。
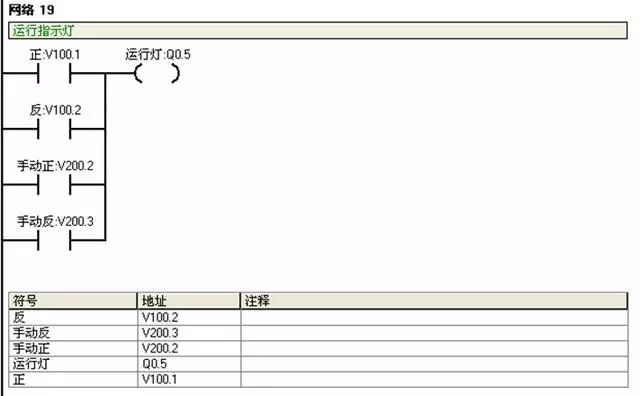
正反轉運行時,運行指示燈亮。

不處于復位或運行狀態時,停止燈亮。
-
機器人
+關注
關注
211文章
28522瀏覽量
207531 -
plc
+關注
關注
5013文章
13328瀏覽量
464093
原文標題:機器人周邊設備控制——PLC簡單案例講解!
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論