 廣泛應用的城市語義分割的數據集整理
廣泛應用的城市語義分割的數據集整理
對城市自動駕駛語義分割的開源數據集的理解可能會對工程師如何訓練自動駕駛模型有所幫助。
最近10年我們在語義分割數據集的創建和算法提升方面付出了很多努力。最近得益于深度學習理論的發展,我們在視覺場景理解的子領域中獲得了不少進步。深度學習的缺點是需要大量的標注數據,這里我們整理了一些廣泛應用的城市語義分割的數據集,希望可以為自動駕駛領域提供借鑒。
這是我們關于如果為自動駕駛提供語義分割數據集系列文章中的第一篇。語義分割標注任務主要是指在像素級水平上,把圖片中的物體按照類分別標注。這些類可能是行人,車輛,建筑物,天空,植被等等。例如,語義分割可以幫助SDCs(自動駕駛車輛)識別一個圖片中的可行駛區域。
數據集
| 名字 | 時間 | 類別 | 圖片數量 | 地點 | 環境 |
|---|---|---|---|---|---|
| CamVid | 2007 | 32 | 700 | Cambridge | 白天 |
| KITTI | 2012 | N/A | N/A | Kalsruhe | 白天 |
| DUS | 2013 | 5 | 500 | Heidelberg | 白天 |
| CityScapes | 2016 | 30 | 5000 (+20000) | 德國,瑞士,法國 | 氣候 (春/夏/秋) |
| Vistas | 2017 | 66 | 25000 | 美國,歐洲,非洲,亞洲大洋洲 | 晴天、下雨、下雪、霧黃昏、白天,晚上 |
CAMVID
CamVid(960x720px)
這是最早用于自動駕駛領域的語義分割數據集,發布于2007年末。他們應用自己的圖像標注軟件在一段10分鐘的視頻中連續標注了700張圖片,這些視頻是由安裝在汽車儀表盤的攝像機拍攝的,拍攝視角和司機的視角基本一致。
KITTI

KITTI Dataset(1242*375px)
KITTI數據集發布于2012年,但是他們起初不標注好的語義分割圖像,而是后來由另外的團隊標注而成。然而這個數據集沒有包括對道路的標注。這個小數據集是由安裝在車頂部的一系列傳感器包括灰度傳感器,彩色相機,雷達掃描儀和GPS/IMU單元拍攝而成。
DUS

DUS Dataset(1024*440px)
這個數據集包括5000灰度圖像,其中只有500張標注過的語義分割圖片。與其他數據集不同的是,它不包括“自然”這一分類。因為尺寸小,所以它比較適合用來測試語義分割模型的表現效果。
CityScapes

Cityscapes Dataset(2048*1024px)
它是DUS數據集的擴展版本,在更多的地形和氣候條件下錄制來獲取更多變的城市景觀。這個數據集也包括了很多粗糙的圖片來提升大量弱標注的數據的表現效果。和DUS類似,相機是安裝在擋風玻璃后面。圖片中的30個類別也被分成了8個大類。這個數據集的一個特征就是它提供了20000多張粗分割的圖片。很多深度學習技術應用這個傳統的數據集來提升他們IoU評分。
最近的模型一般IoU都在80%以上,一下鏈接包含了他們的打分系統還有實施準則。
Mapillary

Mapillary Vistas Dataset
是一個街景圖片平臺,平臺注冊用戶可以共同合作參與去制作更好的地圖。他們開放了部分圖片數據集并且以像素級精度標注了這些圖片。在寫這篇文章時,它是世界上最大的做多樣化的開源數據集,地理范圍跨越了大陸。
由于這個平臺上的圖片使大眾一起收集的,所以圖片角度有很多種類。
-
數據集
+關注
關注
4文章
1208瀏覽量
24689 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166397 -
深度學習
+關注
關注
73文章
5500瀏覽量
121113
原文標題:自動駕駛領域的語義分割數據集有哪些
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
聚焦語義分割任務,如何用卷積神經網絡處理語義圖像分割?
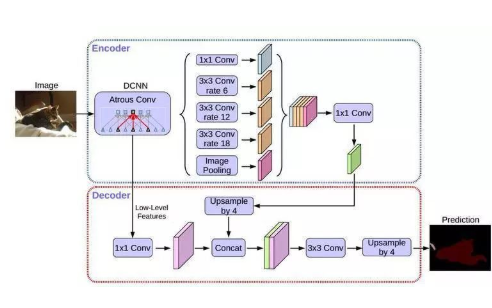
DeepLab進行語義分割的研究分析
語義分割算法系統介紹
大華股份AI刷新了Cityscapes數據集中語義分割任務的全球最好成績

基于深度學習的三維點云語義分割研究分析
基于深度神經網絡的圖像語義分割方法
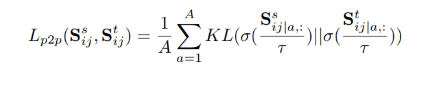
跨圖像關系型KD方法語義分割任務-CIRKD
語義分割數據集:從理論到實踐

PyTorch教程-14.9. 語義分割和數據集







 工商網監
工商網監
評論