") 一文看懂a(chǎn)rduino驅(qū)動(dòng)uln2003操作步進(jìn)電機(jī)的方法
一文看懂a(chǎn)rduino驅(qū)動(dòng)uln2003操作步進(jìn)電機(jī)的方法
arduino驅(qū)動(dòng)uln2003操作步進(jìn)電機(jī)的方法
1、網(wǎng)上買的步進(jìn)電機(jī),很多接線順序都不對(duì)。經(jīng)過不懈努力查資料,終于找到了能用的接線方式:
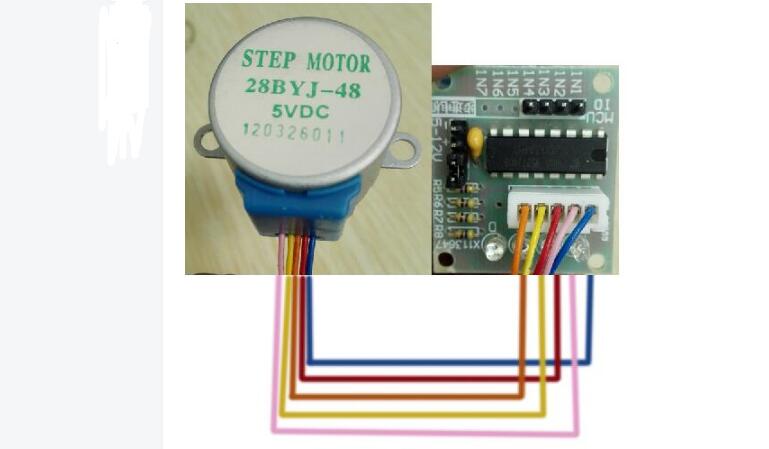
電機(jī)上的12345針腳,對(duì)應(yīng)著接線端子的42135。

2、ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)板可以讓你方便的用Arduino控制28BYJ-48步進(jìn)電機(jī)。驅(qū)動(dòng)板的電機(jī)供電接口可以連接到Arduino的GND和5V取電,但是不推薦這種方法,推薦用獨(dú)立的5-12伏1安培的電源或電池組取電。“IN0~I(xiàn)N4”連接arduino的4個(gè)數(shù)字口(在代碼里進(jìn)行相應(yīng)的設(shè)置)。
3、28BYJ-48步進(jìn)電機(jī)的齒輪減速比為64:1,轉(zhuǎn)速約15轉(zhuǎn)/分鐘,一些軟件采用某些手段和高電壓電源(如12伏直流)也能達(dá)到約25轉(zhuǎn)/分鐘的轉(zhuǎn)速。
4步控制信號(hào)序列:11.25度/步,32步旋轉(zhuǎn)一周。
8步控制信號(hào)序列:5.625度/步, 64步旋轉(zhuǎn)一周。
正常情況下,4步模式下旋轉(zhuǎn)一周將用:32(步/周)X64(齒輪比) = 2048 步。
代碼如下:
//使用arduino IDE自帶的Stepper.h庫文件
#include 《Stepper.h》
// 這里設(shè)置步進(jìn)電機(jī)旋轉(zhuǎn)一圈是多少步
#define STEPS 100
//設(shè)置步進(jìn)電機(jī)的步數(shù)和引腳(就是注意點(diǎn)2里面說的驅(qū)動(dòng)板上IN1~I(xiàn)N4連接的四個(gè)數(shù)字口)。
Stepper stepper(STEPS, 8, 9, 10, 11);
void setup()
{
// 設(shè)置電機(jī)的轉(zhuǎn)速:每分鐘為90步
stepper.setSpeed(90);
// 初始化串口,用于調(diào)試輸出信息
Serial.begin(9600);
}
void loop()
{
// 順時(shí)針旋轉(zhuǎn)一周
Serial.println(“shun”);
stepper.step(2048);
//4步模式下旋轉(zhuǎn)一周用2048 步。
delay(500);
// 逆時(shí)針旋轉(zhuǎn)半周
Serial.println(“ni”);
stepper.step(-1024);
//4步模式下旋轉(zhuǎn)一周用2048 步。
delay(500);
}
ULN2003引腳及功能
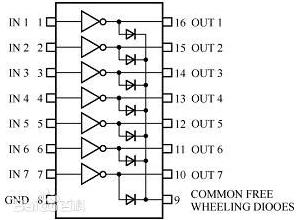
引腳1:CPU脈沖輸入端,端口對(duì)應(yīng)一個(gè)信號(hào)輸出端。
引腳2:CPU脈沖輸入端。
引腳3:CPU脈沖輸入端。
引腳4:CPU脈沖輸入端。
引腳5:CPU脈沖輸入端。
引腳6:CPU脈沖輸入端。
引腳7:CPU脈沖輸入端。
引腳8:接地。
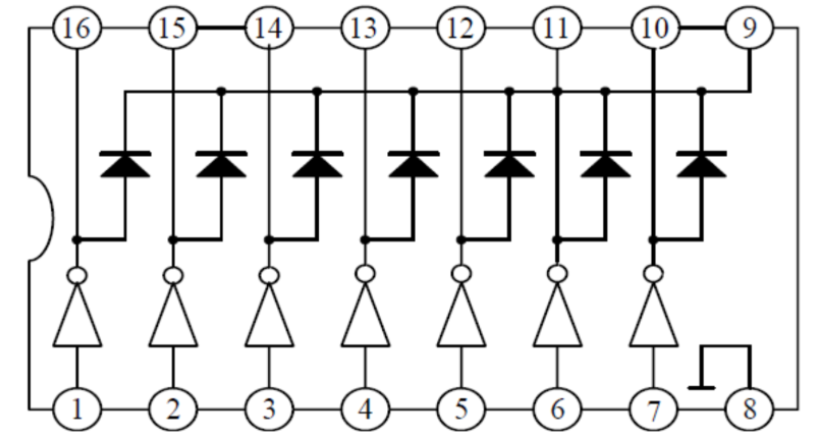
引腳9:該腳是內(nèi)部7個(gè)續(xù)流二極管負(fù)極的公共端,各二極管的正極分別接各達(dá)林頓管的集電極。用于感性負(fù)載時(shí),該腳接負(fù)載電源正極,實(shí)現(xiàn)續(xù)流作用。如果該腳接地,實(shí)際上就是達(dá)林頓管的集電極對(duì)地接通。
引腳10:脈沖信號(hào)輸出端,對(duì)應(yīng)7腳信號(hào)輸入端。
引腳11:脈沖信號(hào)輸出端,對(duì)應(yīng)6腳信號(hào)輸入端。
引腳12:脈沖信號(hào)輸出端,對(duì)應(yīng)5腳信號(hào)輸入端。
引腳13:脈沖信號(hào)輸出端,對(duì)應(yīng)4腳信號(hào)輸入端。
引腳14:脈沖信號(hào)輸出端,對(duì)應(yīng)3腳信號(hào)輸入端。
引腳15:脈沖信號(hào)輸出端,對(duì)應(yīng)2腳信號(hào)輸入端。
引腳16:脈沖信號(hào)輸出端,對(duì)應(yīng)1腳信號(hào)輸入端。
ULN2003作用
ULN2003是大電流驅(qū)動(dòng)陣列,多用于單片機(jī)、智能儀表、PLC、數(shù)字量輸出卡等控制電路中。可直接驅(qū)動(dòng)繼電器等負(fù)載。
輸入5VTTL電平,輸出可達(dá)500mA/50V。
ULN2003是高耐壓、大電流達(dá)林頓系列,由七個(gè)硅NPN達(dá)林頓管組成。 該電路的特點(diǎn)如下: ULN2003的每一對(duì)達(dá)林頓都串聯(lián)一個(gè)2.7K的基極電阻,在5V的工作電壓下它能與TTL和CMOS電路 直接相連,可以直接處理原先需要標(biāo)準(zhǔn)邏輯緩沖器來處理的數(shù)據(jù)。
ULN2003 是高壓大電流達(dá)林頓晶體管陣列系列產(chǎn)品,具有電流增益高、工作電壓高、溫度范圍寬、帶負(fù)載能力強(qiáng)等特點(diǎn),適應(yīng)于各類要求高速大功率驅(qū)動(dòng)的系統(tǒng)。
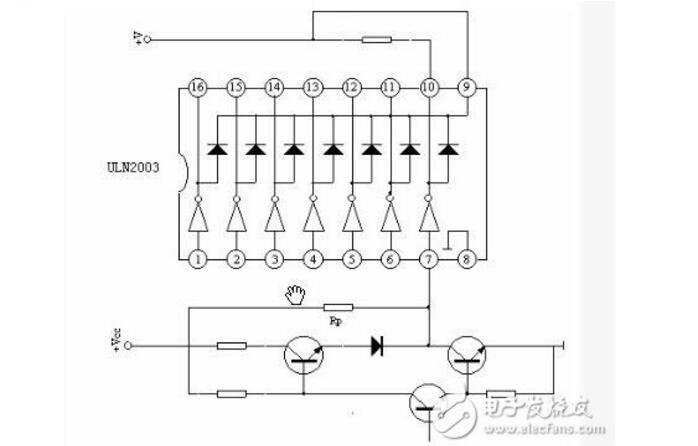
uln2003應(yīng)用電路
ULN2003應(yīng)用電路在自動(dòng)化密集的的場(chǎng)合會(huì)有很多被控元件如繼電器,微型電機(jī),風(fēng)機(jī),電磁閥,空調(diào),水處理等元件及設(shè)備,這些設(shè)備通常由CPU所集中控制,由于控制系統(tǒng)不能直接驅(qū)動(dòng)被控元件,這需要由功率電路來擴(kuò)展輸出電流以滿足被控元件的電流,電壓。
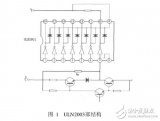
高壓大電流達(dá)林頓晶體管陣列系列產(chǎn)品就屬于這類可控大功率器件,由于這類器件功能強(qiáng)、應(yīng)用范圍語廣。下圖ULN2003的典型應(yīng)用圖。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3131瀏覽量
148248 -
ULN2003
+關(guān)注
關(guān)注
10文章
129瀏覽量
33601 -
Arduino
+關(guān)注
關(guān)注
188文章
6479瀏覽量
188671
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于STM32103和ULN2003的步進(jìn)電機(jī)控制
ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用
用stm32驅(qū)動(dòng)步進(jìn)電機(jī)(一) ——使用ULN2003芯片 資料分享
Arduino,ULN2003和28YJ-48步進(jìn)電機(jī)執(zhí)行控制 相關(guān)資料下載
5V步進(jìn)電機(jī)馬達(dá)+ ULN2003驅(qū)動(dòng)板+Arduino
使用uln2003模塊驅(qū)動(dòng)步進(jìn)電機(jī)
采用51驅(qū)動(dòng)ULN2003的方法進(jìn)行驅(qū)動(dòng)
如何實(shí)現(xiàn)arduino驅(qū)動(dòng)uln2003操作步進(jìn)電機(jī)?
DIY一個(gè)ULN2003電機(jī)驅(qū)動(dòng)器
ULN2003驅(qū)動(dòng)步進(jìn)電機(jī)
基于ULN2003及單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)的應(yīng)用案例
步進(jìn)電機(jī)驅(qū)動(dòng)板模塊ULN2003芯片資料包
基于定時(shí)器中斷的ULN2003驅(qū)動(dòng)器/步進(jìn)電機(jī)驅(qū)動(dòng)程序






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論