") 針對涂膠,ABB機器人有專門的dispense軟件
針對涂膠,ABB機器人有專門的dispense軟件
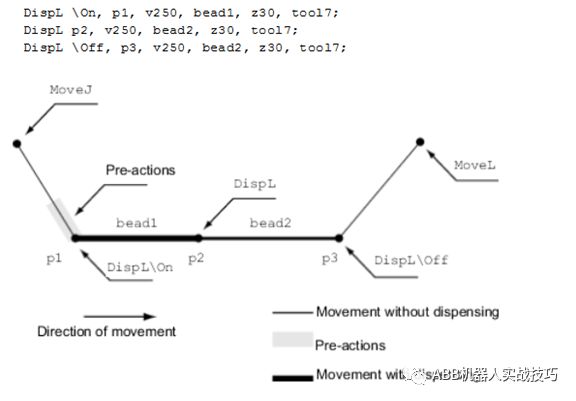
1)針對涂膠,ABB機器人有專門的dispense軟件,也有對應的指令
2)主要指令有DispL和DispC,其中DispL為走直線,DispC為走圓弧
3)上述為
1)機器人走到p1點開始涂膠
2)P1到p2之間使用bead1涂膠參數(shù)
3)P2到p3使用bead2涂膠參數(shù)
4)到p3后關閉涂膠
4)Bead1參數(shù)如下
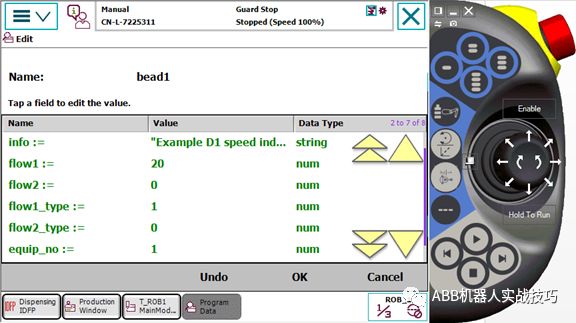
Flow1為流量,flow1_type為流量形式,其中1為 與速度無關(即機器人速度不論快慢,出膠量不變),2為與速度有關,即機器人出膠量會隨著機器人運動速度快加大,速度慢減小
5)對應還有一個參數(shù)為equipdata
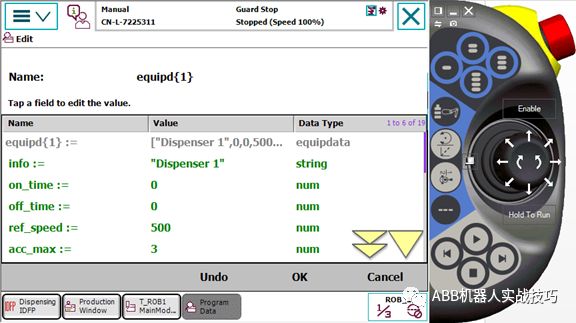
其中,ref_speed即為機器人參考速度。
如果bead數(shù)據(jù)里的flow1_type選擇2,和速度有關。那么如果ref_speed為500,機器人速度實際也為500,出膠量就為設置的20.如果機器人實際速度為250(ref_speed的50%),出膠量就為實際的50%,即10。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28524瀏覽量
207558 -
指令
+關注
關注
1文章
608瀏覽量
35763 -
ABB
+關注
關注
26文章
525瀏覽量
52800
原文標題:干貨 | ABB機器人涂膠指令與數(shù)據(jù)簡介
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
ABB IRB5400-噴涂工業(yè)機器人
` 本帖最后由 京五環(huán)以外 于 2015-1-14 11:17 編輯
ABB機器人IRB 5400是一個噴涂機器人家族,擁有噴涂精確、正常運行時間長、漆料耗用省、工作節(jié)拍短以及有效集成涂裝設備等
發(fā)表于 01-14 11:16
ABB焊接機器人問題
我的ABB機器人做焊接用。機器人給焊機的doweldon信號正常,也與機器人內(nèi)部的weldon信號映射過,但是在使用編程指令arcl /arclstart arclend等指令時不能工
發(fā)表于 10-16 23:07
ABB機器人與單片機的數(shù)字通訊
ABB用的是DEVICENET,請問有什么單片機可以直接與ABB機器人通訊嗎?也就是說有什么單片機可以用DEVICENET嗎
發(fā)表于 10-28 11:00
ABB機器人維修保養(yǎng)指南
普遍需要在運行6000小時后進行一次保養(yǎng),特別是針對在惡劣工況與長時間在負載極限或運行極限下工作的庫卡機器人,則需要每年進行一次***ABB機器人保養(yǎng)。
發(fā)表于 08-19 10:32
ABB機器人發(fā)生不一致路徑精確性故障維修
ABB機器人發(fā)生不一致路徑精確性故障維修原因:ABB機器人維修此種故障的原因可能有以下幾種可能性:①ABB
發(fā)表于 09-09 16:06
ABB機器人驅動器相關故障維修型號有哪些?
ABB機器人驅動器相關故障維修型號有哪些?蘇州吉海機電設備有限公司提供機器人售后服務(產(chǎn)業(yè)用機器人的保養(yǎng)、維護、維修等)、技術咨詢等相關工作
發(fā)表于 10-10 16:02
ZNL-Z07多功能機器人實訓工作站介紹
工藝、拋光打磨工藝、裝配工藝等工業(yè)機器人*典型應用,不僅滿足了職業(yè)院校不同專業(yè)學生針對工業(yè)機器人的操作和編程的教學需求,完全來源于工業(yè)應用現(xiàn)場的特征也使該工作站更加適合于作為職業(yè)技能競賽平臺。工作站深度集成了離線編程技術,
發(fā)表于 07-01 12:24
ABB機器人實訓平臺實驗
ZN-IRB01ABB機器人實訓平臺一、概述ZN-IRB01ABB機器人實訓平臺包含六自由度工業(yè)機器人、傳感器檢測系統(tǒng)、PLC控制系統(tǒng)及一套
發(fā)表于 07-01 08:57
RobotStudio的介紹以及ABB機器人的位置及速度概述
RobotStudio是ABB機器人的離線仿真調(diào)試軟件,還可支持VR體驗。
今天就來好好介紹一下這款ABB機器人的專屬強大
ABB的協(xié)作機器人強勢登場
在今年春晚上瀟灑揮毫的協(xié)作機器人——“阿福”,想必機器人界都不陌生。這款機器人是abb機器人于2015年推出的YuMi?協(xié)作
ABB機器人線速度_青島ABB機器人發(fā)生電源故障維修
青島ABB機器人發(fā)生電源故障維修工具:檢查ABB機器人DSQC604故障指示燈LED已經(jīng)亮起時,則表示ABB
發(fā)表于 01-11 13:32
?12次下載

ABB機器人拓展其免費的Wizard簡易編程軟件的應用范圍
近日,ABB機器人拓展了其免費的Wizard簡易編程軟件的應用范圍,除了協(xié)作機器人外,現(xiàn)在該軟件也可應用于由OmniCore?控制器驅動的六

abb工業(yè)機器人的編程語言是什么
ABB工業(yè)機器人的編程語言主要是RAPID(Robot Application Programming Interface for Development),它是一種高級編程語言,專門為工業(yè)機
abb機器人的基本配置包括哪些
ABB機器人是一種廣泛應用于工業(yè)自動化領域的智能設備。它具有高度的靈活性、可靠性和精確性,可以完成各種復雜的任務。為了實現(xiàn)這些功能,ABB機器人需要進行基本配置。以下是
abb機器人系統(tǒng)密鑰在哪
、ABB機器人系統(tǒng)密鑰的定義 ABB機器人系統(tǒng)密鑰是一種特殊的密碼,用于保護ABB機器人系統(tǒng)中的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論