") 深度解析智能汽車(chē)?yán)走_(dá)測(cè)試解決方案
深度解析智能汽車(chē)?yán)走_(dá)測(cè)試解決方案
隨著無(wú)人駕駛技術(shù)發(fā)展勢(shì)如破竹,被稱為“汽車(chē)之眼”的雷達(dá)用量也持續(xù)迅猛增長(zhǎng)。未來(lái)的車(chē)輛可能使用多達(dá)八個(gè)雷達(dá)傳感器,為汽車(chē)提供360度全景視圖。雷達(dá)技術(shù)復(fù)雜度不斷增加,也使得測(cè)試?yán)щy重重。但有了NI車(chē)載雷達(dá)測(cè)試系統(tǒng)(VRTS)之后,這都不是事兒。馬上跳轉(zhuǎn)到《微波雜志》2018年3/4月刊,聽(tīng)NI技術(shù)專家Matt Spexarth談?wù)動(dòng)脮r(shí)最少,測(cè)試成本最低的解決方案~
與其他傳感技術(shù)相比,雷達(dá)具有多種優(yōu)勢(shì),這些優(yōu)勢(shì)確保其在汽車(chē)主動(dòng)安全和自動(dòng)駕駛中的作用將在未來(lái)得到充分發(fā)揮。雷達(dá)可以通過(guò)被探測(cè)物體的雷達(dá)多普勒頻移特征來(lái)實(shí)時(shí)探測(cè)被探測(cè)物體的速度,而且適用于雨、霧、雪等惡劣天氣條件。這些優(yōu)勢(shì)促使汽車(chē)制造商越來(lái)越多地采用雷達(dá)。
在美國(guó),美國(guó)國(guó)家公路交通安全管理局(NHTSA)與20家汽車(chē)制造商達(dá)成協(xié)議(這些汽車(chē)制造商占了99%以上的美國(guó)市場(chǎng)),自愿為2022年之前的所有量產(chǎn)汽車(chē)配備自動(dòng)緊急制動(dòng)(AEB)系統(tǒng),AEB是一項(xiàng)基于雷達(dá)的安全功能。隨著汽車(chē)從高級(jí)駕駛輔助系統(tǒng)(ADAS)演變?yōu)橥耆詣?dòng)駕駛,雷達(dá)、激光雷達(dá)和攝像頭等傳感器成為確保車(chē)輛能夠準(zhǔn)確感知周?chē)h(huán)境的關(guān)鍵輸入設(shè)備,為車(chē)輛提供了所需的信息來(lái)做出決定。
汽車(chē)?yán)走_(dá)的發(fā)展和進(jìn)步給雷達(dá)傳感器的測(cè)試和驗(yàn)證帶來(lái)了諸多挑戰(zhàn),簡(jiǎn)而言之,可以歸納為兩大挑戰(zhàn)。
挑戰(zhàn)1:滿足現(xiàn)代汽車(chē)?yán)走_(dá)日益增長(zhǎng)的技術(shù)要求
第一個(gè)挑戰(zhàn)的核心是滿足測(cè)試現(xiàn)代汽車(chē)?yán)走_(dá)日益增長(zhǎng)的技術(shù)要求,同時(shí)保持或降低生產(chǎn)測(cè)試成本。現(xiàn)代雷達(dá)傳感器通常需要76 GHz至77 GHz的1 GHz帶寬,而且很少有公司具備在此頻率范圍內(nèi)構(gòu)建測(cè)試系統(tǒng)的專業(yè)知識(shí)。更高帶寬的傳感器提供更高的分辨率,而雷達(dá)制造商已經(jīng)開(kāi)發(fā)了帶寬接近4 GHz,中心頻率為79 GHz的傳感器,這使得測(cè)試更具挑戰(zhàn)性。
早期的雷達(dá)測(cè)試方式是什么?
雖然未來(lái)雷達(dá)傳感器的技術(shù)不斷提高,但測(cè)試這些傳感器的時(shí)間和成本必須進(jìn)行優(yōu)化,以滿足價(jià)格和數(shù)量要求,進(jìn)而實(shí)現(xiàn)雷達(dá)的廣泛采用。早期的雷達(dá)傳感器制造商使用大型無(wú)回波射頻室和角反射器來(lái)測(cè)試和校準(zhǔn)模塊的功能。這些測(cè)試室通常3或5米長(zhǎng),占用大面積的制造空間。為了減少占地面積,雷達(dá)功能測(cè)試演變?yōu)槭褂?a href="http://www.1cnz.cn/analog/" target="_blank">模擬延遲線來(lái)模擬遠(yuǎn)距離雷達(dá)障礙物,然后由第二個(gè)測(cè)試站進(jìn)行雷達(dá)參數(shù)測(cè)量。
最新最便捷的雷達(dá)測(cè)試系統(tǒng)VRTS
NI車(chē)載雷達(dá)測(cè)試系統(tǒng)(VRTS)等專用系統(tǒng)進(jìn)一步發(fā)展了雷達(dá)功能測(cè)試。VRTS是一款混合模擬器,內(nèi)置有矢量信號(hào)收發(fā)儀(VST),通過(guò)高性能低延遲的FPGA將儀器級(jí)矢量信號(hào)分析儀與矢量信號(hào)發(fā)生器集成在一起(見(jiàn)圖1)。
該方法通過(guò)將功能測(cè)試(對(duì)象模擬)和參數(shù)測(cè)試組合到單個(gè)測(cè)試裝置中來(lái)集成雷達(dá)模塊生產(chǎn)測(cè)試單元。這一組合減少了制造車(chē)間的占地面積,并消除了在測(cè)試站之間轉(zhuǎn)換雷達(dá)模塊的開(kāi)銷(xiāo),不僅提高了吞吐量,也為其他測(cè)試裝置騰出了空間。
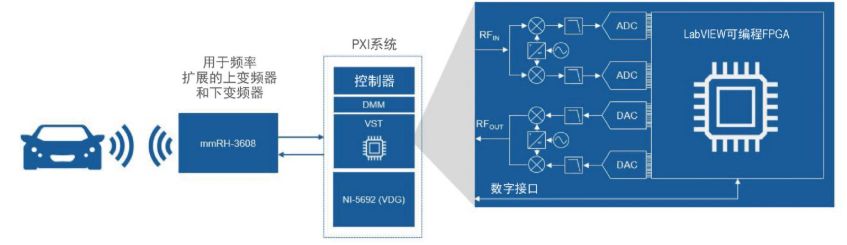
圖1. NI車(chē)載雷達(dá)測(cè)試系統(tǒng)框圖。
挑戰(zhàn)2:對(duì)傳感器內(nèi)日益復(fù)雜的軟件進(jìn)行驗(yàn)證
除了汽車(chē)?yán)走_(dá)測(cè)試的更高頻率和帶寬要求之外,測(cè)試未來(lái)雷達(dá)傳感器的下一個(gè)挑戰(zhàn)是對(duì)傳感器內(nèi)日益復(fù)雜的軟件進(jìn)行驗(yàn)證。具有1 GHz或更高帶寬的雷達(dá)傳感器會(huì)產(chǎn)生大量的原始數(shù)據(jù)。為了避免車(chē)輛的通信總線和ECU超負(fù)荷,雷達(dá)傳感器也配備了一個(gè)處理器,可以將數(shù)據(jù)縮減為概要快照。
雷達(dá)通過(guò)傳感器當(dāng)前跟蹤的所有對(duì)象的摘要定期發(fā)送參數(shù)化對(duì)象表。每個(gè)物體都包含距離、速度、雷達(dá)截面(RCS)、物體ID和置信度(衡量雷達(dá)物體存在的可信度)信息。雷達(dá)的軟件會(huì)檢測(cè)這些物體并跟蹤它們的實(shí)時(shí)動(dòng)作。軟件算法會(huì)尋找不一致性,例如障礙物正在遠(yuǎn)離傳感器,但其多普勒特征卻指示其正在接近。
使用緊湊型雷達(dá)測(cè)試系統(tǒng)可以讓軟件開(kāi)發(fā)人員立即快速驗(yàn)證軟件更改
在實(shí)驗(yàn)室中,工程師必須驗(yàn)證這些算法和實(shí)現(xiàn)這些算法的軟件。這些算法的車(chē)內(nèi)現(xiàn)場(chǎng)測(cè)試非常重要,但使用緊湊型雷達(dá)測(cè)試系統(tǒng)進(jìn)行的實(shí)驗(yàn)室測(cè)試可以讓軟件開(kāi)發(fā)人員立即快速驗(yàn)證軟件更改。
結(jié)合用于移動(dòng)雷達(dá)模擬天線的機(jī)電一體化組件,VRTS等系統(tǒng)可以生成標(biāo)準(zhǔn)化的雷達(dá)環(huán)境來(lái)描述和驗(yàn)證雷達(dá)傳感器軟件,包括模擬在駕駛測(cè)試中很難模擬或者很危險(xiǎn)的極端場(chǎng)景。基于模擬器的實(shí)驗(yàn)室測(cè)試對(duì)于保證汽車(chē)?yán)走_(dá)傳感器設(shè)計(jì)的創(chuàng)新步伐至關(guān)重要。
通過(guò)雷達(dá)仿真系統(tǒng)進(jìn)行系統(tǒng)驗(yàn)證
在整個(gè)ADAS或自動(dòng)駕駛系統(tǒng)中,工程師還必須考慮通過(guò)雷達(dá)仿真來(lái)進(jìn)行系統(tǒng)驗(yàn)證測(cè)試。這些系統(tǒng)越來(lái)越依賴于傳感器的組合,包括相機(jī)、激光雷達(dá)和雷達(dá)。驗(yàn)證自動(dòng)緊急制動(dòng)等ADAS功能的整體性能越來(lái)越多地利用傳感器融合技術(shù),通過(guò)兩個(gè)或更多傳感器的組合來(lái)提高障礙物檢測(cè)的質(zhì)量或置信度。例如,如果ADAS雷達(dá)傳感器“看到”障礙物,但攝像機(jī)卻指示路上空無(wú)一物,則ECU可以將雷達(dá)檢測(cè)到的障礙物視為幻影或干擾。
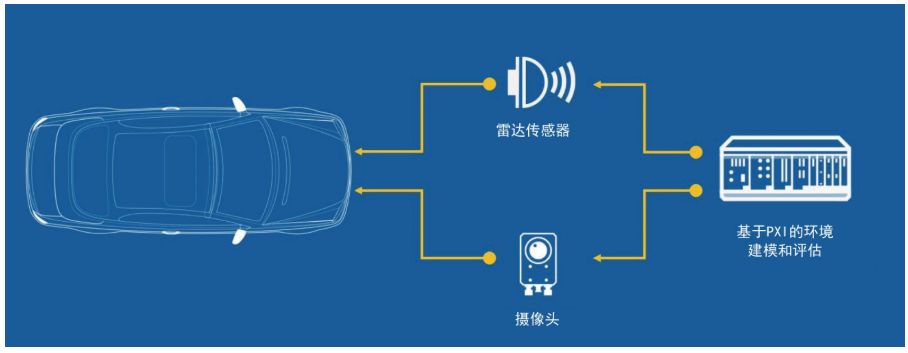
圖2.驗(yàn)證用于ADAS和自動(dòng)駕駛的軟件需要同步仿真多個(gè)汽車(chē)傳感器,以便汽車(chē)“認(rèn)為”它在真實(shí)環(huán)境中駕駛。
當(dāng)這些功能的測(cè)試上升到系統(tǒng)級(jí)時(shí),工程師需要一個(gè)測(cè)試平臺(tái)來(lái)支持大量同步傳感器仿真,以模擬車(chē)輛感測(cè)到的整個(gè)周邊環(huán)境。由于VRTS等系統(tǒng)是基于模塊化自動(dòng)化測(cè)試設(shè)備標(biāo)準(zhǔn)PXI-Express上,工程師可以通過(guò)添加額外的PXI模塊(如NI FlexRIO)來(lái)支持額外的傳感器,以模擬與雷達(dá)仿真同步的數(shù)字相機(jī)輸入。
最后,先進(jìn)的雷達(dá)調(diào)制技術(shù)將對(duì)汽車(chē)?yán)走_(dá)測(cè)試的未來(lái)產(chǎn)生影響。調(diào)頻連續(xù)波(FMCW)雷達(dá)一直是汽車(chē)?yán)走_(dá)的典型代表。雷達(dá)設(shè)計(jì)人員現(xiàn)在正在尋找使用MIMO天線來(lái)增強(qiáng)汽車(chē)?yán)走_(dá)功能,以精確檢測(cè)障礙物高度,甚至提供類(lèi)似于攝像頭的光柵圖像。
雷達(dá)傳感器研究人員發(fā)現(xiàn)采用與蜂窩通信中常用調(diào)制方案類(lèi)似的調(diào)制方案可以獲得更高的性能。這些方案可以將分配給汽車(chē)?yán)走_(dá)的頻譜信道化,使MIMO雷達(dá)能夠?qū)Σ⑿邪l(fā)射和接收路徑之間的單個(gè)雷達(dá)反射進(jìn)行。這種方法有望改善雷達(dá)分辨率和視場(chǎng),同時(shí)增強(qiáng)雷達(dá)對(duì)其他車(chē)輛干擾的抵抗力。相應(yīng)地,雷達(dá)測(cè)試系統(tǒng)也必須越來(lái)越復(fù)雜。
在這些成像雷達(dá)的分辨率下準(zhǔn)確模擬障礙物可能需要解調(diào)單個(gè)雷達(dá)信道,對(duì)每個(gè)發(fā)射信道應(yīng)用距離、多普勒和RCS障礙效應(yīng),并按照原始方案調(diào)制每個(gè)信道,然后將該障礙物信號(hào)反射回傳感器 - 全部以光速往返。這些要求給雷達(dá)測(cè)試供應(yīng)商和供應(yīng)商帶來(lái)嚴(yán)峻挑戰(zhàn),亟需具有極高信號(hào)處理能力的高帶寬低延遲系統(tǒng)架構(gòu)。
-
傳感器
+關(guān)注
關(guān)注
2557文章
51729瀏覽量
758804 -
無(wú)人駕駛
+關(guān)注
關(guān)注
98文章
4108瀏覽量
121582 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
294瀏覽量
34639
原文標(biāo)題:媒體眼 | 未來(lái)的汽車(chē)?yán)走_(dá)測(cè)試將基于模塊化解決方案
文章出處:【微信號(hào):nipush,微信公眾號(hào):nipush】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論