") 關(guān)于基于快速模型預(yù)測(cè)控制的超級(jí)電容城軌充電
關(guān)于基于快速模型預(yù)測(cè)控制的超級(jí)電容城軌充電
0 引言
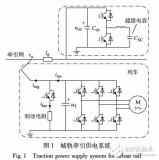
隨著城市建設(shè)的不斷推進(jìn),城軌,地鐵等便捷、無(wú)擁堵的交通工具正在公共交通系統(tǒng)中扮演著越來(lái)越重要的角色[1]。超級(jí)電容儲(chǔ)能式城軌作為一種新興的城市軌道交通設(shè)備,利用了超級(jí)電容功率密度大,充放電速度快,壽命長(zhǎng)的優(yōu)點(diǎn)[2],不再需要大范圍架設(shè)的牽引電纜,而僅由車載超級(jí)電容組供電即可保證列車的正常運(yùn)行。列車進(jìn)站時(shí),站臺(tái)充電機(jī)利用乘客上下車的30 s時(shí)間為車載超級(jí)電容組充電,以維持列車至下一站前的正常運(yùn)行[3]。
實(shí)際運(yùn)行測(cè)算中,需要至少維持430 A的電流使車載超級(jí)電容組在30 s內(nèi)從500 V充滿電至900 V。保證充電電流從0 A平穩(wěn)快速地上升至430 A,同時(shí)避免充電過程中出現(xiàn)的電流尖峰破壞功率器件,是設(shè)計(jì)儲(chǔ)能式城軌充電機(jī)所需解決的關(guān)鍵問題之一。
考慮到上述的充電要求,儲(chǔ)能式城軌超級(jí)電容充電可歸結(jié)為一個(gè)帶約束的優(yōu)化問題并采用模型預(yù)測(cè)控制(MPC)算法進(jìn)行求解[4]。考慮到基于開關(guān)器件的充電電路控制周期很短,將MPC應(yīng)用于儲(chǔ)能式城軌超級(jí)電容充電需要解決優(yōu)化目標(biāo)快速實(shí)時(shí)求解的問題,而這也是MPC在電力電子領(lǐng)域應(yīng)用的一大研究熱點(diǎn)[5]。
近年來(lái),眾多學(xué)者提出了一類簡(jiǎn)化或改進(jìn)后的經(jīng)典優(yōu)化算法以降低MPC計(jì)算復(fù)雜度。文獻(xiàn)[6]通過對(duì)二次規(guī)劃問題的標(biāo)準(zhǔn)求解算法進(jìn)行改進(jìn)提高M(jìn)PC在線求解的速度;文獻(xiàn)[7]引入固定障礙參數(shù)的機(jī)制,將傳統(tǒng)內(nèi)點(diǎn)法求解由兩層迭代簡(jiǎn)化為一層迭代,使MPC實(shí)時(shí)計(jì)算量大幅降低;文獻(xiàn)[8]將傳統(tǒng)的牛頓-拉夫遜算法進(jìn)行擴(kuò)展,使二次規(guī)劃問題的求解得到了大幅簡(jiǎn)化。
本文首先基于MPC算法設(shè)計(jì)超級(jí)電容充電控制率,在最優(yōu)解求解時(shí),采用改進(jìn)的內(nèi)點(diǎn)法實(shí)現(xiàn)快速求解。相較于傳統(tǒng)方法使障礙參數(shù)不斷逼近于0,僅用一個(gè)經(jīng)過試驗(yàn)驗(yàn)證的固定參數(shù)進(jìn)行求解;同時(shí)采用一種暖啟動(dòng)機(jī)制,將該時(shí)刻求解值用作下一時(shí)刻的初始解,大大簡(jiǎn)化求解的計(jì)算量。通過Matlab仿真對(duì)障礙參數(shù)進(jìn)行選取,并利用縮比試驗(yàn)平臺(tái)驗(yàn)證快速充電策略的有效性。
1 系統(tǒng)建模
1.1 超級(jí)電容充電機(jī)模型
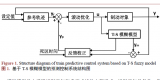
超級(jí)電容充電機(jī)基于Buck電路搭建,其系統(tǒng)模型如圖1所示。其中采用經(jīng)典的三分支模型[9]對(duì)超級(jí)電容進(jìn)行建模。依據(jù)實(shí)際需求,此處僅考慮在瞬態(tài)過程中占據(jù)主導(dǎo)作用的瞬態(tài)支路RiCi。
1.2 充電系統(tǒng)模型
基于狀態(tài)空間平均法的系統(tǒng)模型為:
C=[1,0,0],b=RiCi+RleakCi+RleakCf,a=1/CiRiRleak。系統(tǒng)狀態(tài)量中i為電感電流,v為超級(jí)電容端電壓,ic為濾波電容電壓。r為回路等效阻抗,L為電感,Cf為濾波電容,Ri和Ci分別為超級(jí)電容瞬態(tài)支路電阻和電容,Rleak為超級(jí)電容漏電阻。
進(jìn)一步取IGBT開關(guān)周期Ts為采樣周期,進(jìn)而得到如式(2)所示的充電系統(tǒng)離散時(shí)域線性模型:

2 充電策略設(shè)計(jì)
考慮到實(shí)際中超級(jí)電容充電系統(tǒng)的開關(guān)周期達(dá)到了1 kHz,本文中綜合考慮跟蹤精度及計(jì)算時(shí)間,選取預(yù)測(cè)時(shí)域P和控制時(shí)域M均為2。在此基礎(chǔ)上,可以得到如式(3)所示的目標(biāo)函數(shù),其中第一項(xiàng)為對(duì)期望電流的跟蹤,第二項(xiàng)為對(duì)占空比變化量的限制:
在構(gòu)建最大峰值電流約束之前,首先給出第k個(gè)周期內(nèi)峰值電感電流的估計(jì)式:

其中(vin-v(k))d(k)/L代表了第k個(gè)周期內(nèi)電感電流所增長(zhǎng)的量。在該估計(jì)式的基礎(chǔ)上,可以得到如下的第k時(shí)刻及第(k+1)時(shí)刻的電感峰值電流約束關(guān)系式:

最終所構(gòu)建的模型預(yù)測(cè)控制問題轉(zhuǎn)化為一個(gè)準(zhǔn)二次型規(guī)劃問題。最終的MPC優(yōu)化目標(biāo)如式(6)所示:
3 目標(biāo)函數(shù)求解
3.1 固定障礙參數(shù)法求解
首先引入對(duì)數(shù)形式的障礙函數(shù)將上一節(jié)中所構(gòu)建的MPC優(yōu)化問題不等式約束轉(zhuǎn)化為等式約束:
其中λ>0被稱為障礙參數(shù)。當(dāng)λ趨向于0時(shí),式(8)的解收斂于原MPC優(yōu)化問題的解。
不同于經(jīng)典內(nèi)點(diǎn)法,本文僅選用一個(gè)固定障礙參數(shù)λ帶入優(yōu)化問題中進(jìn)行求解,而不再使其逐漸收斂于0。盡管該種機(jī)制會(huì)導(dǎo)致求解值偏離最優(yōu)解,但在Steven等人的經(jīng)典的論文中證實(shí)[7],只要λ選取得當(dāng),控制器的性能并不會(huì)因?yàn)槭墙谱顑?yōu)解而受到明顯的削弱,而求解所需的時(shí)間卻可以大大的縮短。本文首先設(shè)定一個(gè)可以反映不同λ下實(shí)際控制性能的指標(biāo)e(k):

其中ε是常數(shù),e(k)反映了不同時(shí)刻下輸出電流對(duì)參考值的跟蹤誤差。進(jìn)而依據(jù)e(k)歷史曲線選取障礙參數(shù)λ。
帶入固定障礙參數(shù)λ后,可以得到所構(gòu)建MPC最優(yōu)問題的最優(yōu)控制序列D所需滿足的條件:
3.2 固定障礙參數(shù)選取
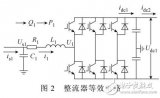
Matlab中搭建電路及控制器,設(shè)置仿真參數(shù)如下:vin=1 300(V),L=10(mH),r=0.01(Ω),Cf=7 200(μF),Rleak=9(kΩ),Ri=0.02(Ω),Ci=24.5(Ω),Ts=0.001(Ω)。
λ=1,λ=0.1,λ=0.001,λ=0.01時(shí)的e(k)歷史曲線如圖2所示。可以看出λ=0.001時(shí),電流初始上升階段額e(k)峰值達(dá)到約5×10-5,當(dāng)電流趨于穩(wěn)定后,在小范圍內(nèi)規(guī)律的波動(dòng)。分析可知,由于求解的控制量為近似最優(yōu)解,其會(huì)在最優(yōu)控制量附近小范圍波動(dòng),最終導(dǎo)致了輸出電流在期望值附近小范圍波動(dòng)。經(jīng)對(duì)比最終選取λ=0.001作為固定障礙參數(shù)。
3.3 暖啟動(dòng)機(jī)制
采用固定障礙參數(shù)機(jī)制后,每次求解所需迭代次數(shù)從約50次縮減為僅約10次。為進(jìn)一步減少求解所需的迭代次數(shù),本文引入另外一種稱為熱啟動(dòng)的機(jī)制。該機(jī)制將(k-1)時(shí)刻所求解作為k時(shí)刻迭代初始解。該方法利用固定障礙參數(shù)法將MPC優(yōu)化問題轉(zhuǎn)化為純牛頓迭代求解的特性,可進(jìn)一步使每次迭代求解所需次數(shù)縮減為僅僅約5次。相關(guān)性能在后續(xù)試驗(yàn)中得到進(jìn)一步驗(yàn)證。
4 仿真
按3.2節(jié)設(shè)置仿真參數(shù),固定障礙參數(shù)λ=0.001,并引入暖啟動(dòng)機(jī)制求解,各仿真曲線如圖3~圖5所示。
圖3可看出電流在前0.3 s內(nèi)從0 A穩(wěn)定上升至430 A,隨后開始保持穩(wěn)定。當(dāng)超級(jí)電容電壓上升至850 V,充電時(shí)間約為20 s時(shí),電流開始緩慢下降,在約2.5 s內(nèi)最終下降至100 A,直至充電結(jié)束。整個(gè)過程保持了快速而平穩(wěn)的趨勢(shì),未出現(xiàn)電流尖峰。
圖4可看出控制量初始值較大,跌落后開始隨超級(jí)電容端電壓的升高穩(wěn)步增加。電流從430 A降至100 A的過程中,由于期望電流曲線呈階梯快速下降的趨勢(shì),占空比在0.4至1的范圍內(nèi)有一段抖動(dòng),但總體趨勢(shì)逐漸趨于平緩。滿足了優(yōu)化目標(biāo)函數(shù)中對(duì)控制量的約束。
圖5可看出從0 s開始,充電電容端電壓從500 V開始穩(wěn)定上升,當(dāng)升至850 V時(shí),由于充電電流逐漸減小至100 A,超級(jí)電容端電壓上升速度減緩,最終在充電結(jié)束時(shí)達(dá)到900 V。
5 試驗(yàn)驗(yàn)證
將實(shí)際充電系統(tǒng)進(jìn)行了縮放,在實(shí)驗(yàn)室完成進(jìn)一步試驗(yàn)驗(yàn)證。已有的超級(jí)電容模組由18個(gè)2.7 V/3 500 F單體的單體串聯(lián)而成,超級(jí)電容負(fù)載由2個(gè)超級(jí)電容模組構(gòu)成,其等效參數(shù)為97.2 V/97.2 F。最終選定以30 A電流對(duì)超級(jí)電容負(fù)載進(jìn)行充電,其電壓變化范圍定為30 V~39 V。確定系統(tǒng)功率等級(jí)后,設(shè)計(jì)如圖6所示的驗(yàn)證平臺(tái),實(shí)物圖如圖7所示。
圖8為基于驗(yàn)證平臺(tái)的充電試驗(yàn)數(shù)據(jù)。從實(shí)驗(yàn)數(shù)據(jù)可看出,充電電流在0.5 s內(nèi)上升至設(shè)定的30 A,盡管出現(xiàn)較小超調(diào),但滿足電流快速平穩(wěn)上升的需求。當(dāng)超級(jí)電容電壓升至37 V,充電電流逐漸由30 A減為10 A,最終在超級(jí)電容電壓達(dá)到39 V時(shí)停止。整個(gè)充電過程充電電流按照期望曲線變化,且滿足了峰值電流約束,超級(jí)電容在設(shè)定時(shí)間內(nèi)由30 V充電至39 V。
6 結(jié)論
考慮到快速充電的需求及超級(jí)電容模型的復(fù)雜性,儲(chǔ)能式超級(jí)電容城軌列車的充電問題可以歸結(jié)為一個(gè)帶約束的最優(yōu)問題進(jìn)行求解。MPC在解決有限時(shí)域約束問題上有著天然的優(yōu)勢(shì),然而在短時(shí)間內(nèi)求解目標(biāo)函數(shù)是MPC應(yīng)用至電力電子領(lǐng)域的一大難點(diǎn)。本文提出的改進(jìn)內(nèi)點(diǎn)法相較于傳統(tǒng)內(nèi)點(diǎn)法,將求解目標(biāo)函數(shù)所需的迭代步數(shù)從50步減小至約僅10步,結(jié)合后續(xù)提出的暖年啟動(dòng)機(jī)制,使求解所需迭代步數(shù)縮減至僅約5步,在高效率完成求解的同時(shí),保證了良好的控制效果。仿真及試驗(yàn)可以看出,盡管選用固定障礙參數(shù)會(huì)帶來(lái)求解的一定偏差或波動(dòng),但整體效果是大大符合預(yù)期的。關(guān)于進(jìn)一步優(yōu)化該算法,提高控制精度的研究,將會(huì)在后續(xù)的工作中繼續(xù)展開。
-
超級(jí)電容
+關(guān)注
關(guān)注
18文章
545瀏覽量
34555 -
buck電路
+關(guān)注
關(guān)注
27文章
484瀏覽量
46454
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
永磁同步電機(jī)模型預(yù)測(cè)控制Simulink仿真教程資料下載
永磁同步電機(jī)模型預(yù)測(cè)控制matlab/simulink仿真模型
永磁同步電機(jī)模型預(yù)測(cè)控制MATLAB仿真 相關(guān)資料下載
MMC(模塊化多電平)模型預(yù)測(cè)控制MATLAB仿真 精選資料分享
模型預(yù)測(cè)控制+邏輯控制
模型預(yù)測(cè)控制介紹
什么是有限集模型預(yù)測(cè)控制
魯棒模型預(yù)測(cè)控制(RMPC)是什么
柔性直流輸電模型預(yù)測(cè)控制
城軌交通的地面式超級(jí)電容儲(chǔ)能裝置控制策略
基于模型預(yù)測(cè)控制的單目標(biāo)預(yù)測(cè)控制法
基于T-S模糊模型的預(yù)測(cè)控制算法在城軌列車制動(dòng)控制中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論