 CAN總線錯誤類型及校驗方法
CAN總線錯誤類型及校驗方法
你了解CAN總線嗎?你知道總線中有哪些錯誤嗎?你想了解總線中的錯誤是如何校驗以及錯誤之間的關系嗎?下文為大家揭開它神秘的面紗。
CAN總線是ISO國際標準化的串行通信協議。在汽車產業中,出于對安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。為適應“減少線束的數量”、“通過多個LAN,進行大量數據的高速通信”的需要,CAN總線應運而生,圖1為CAN總線在汽車中的應用圖。
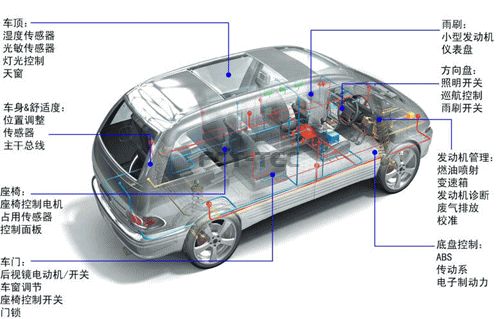
圖1 汽車中CAN總線的應用
CAN的高性能和可靠性已被認同,并被廣泛地應用于工業自動化、船舶、醫療設備、工業設備等方面。現場總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。圖2為CAN總線網路圖,它的出現為分布式控制系統實現各節點之間實時、可靠的數據通信提供了強而有力的技術支持。
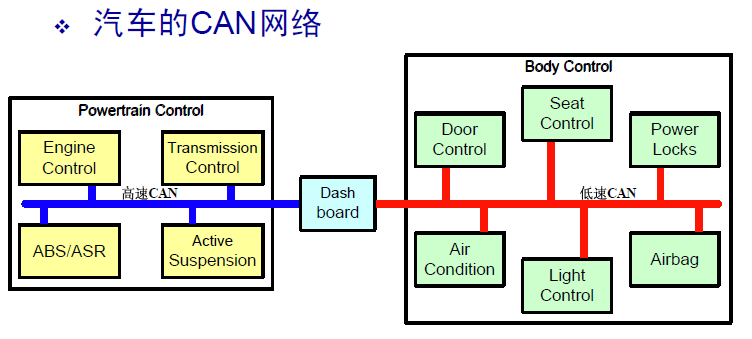
圖2 CAN總線網路圖
CAN總線作為可靠性非常高的總線,出錯概率非常小,這也是它被廣泛應用的原因之一。在CAN總線的實際研發中,相較于CAN總線的正確幀,工程師更關注CAN總線的錯誤幀,下面將為大家展現CANscope波形常見的幾類錯誤,圖3為干擾導致的CAN通訊錯誤。
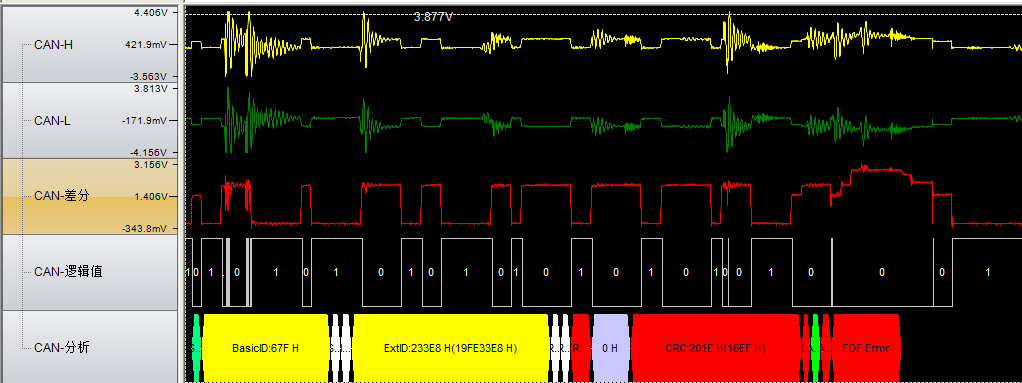
圖3 錯誤波形圖
圖4為終端電阻并聯過多,差分電平幅值太小導致接收節點識別失敗的錯誤。
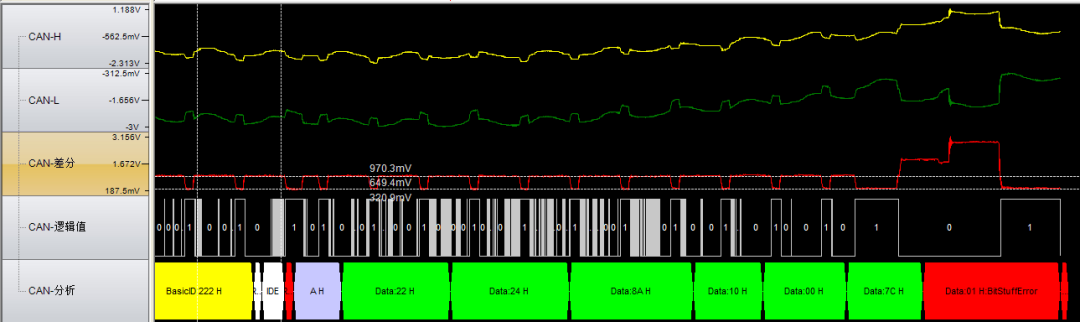
圖4 錯誤波形圖
圖5為總線支線過長,電平下降沿臺階過高,導致位寬度失調的錯誤。
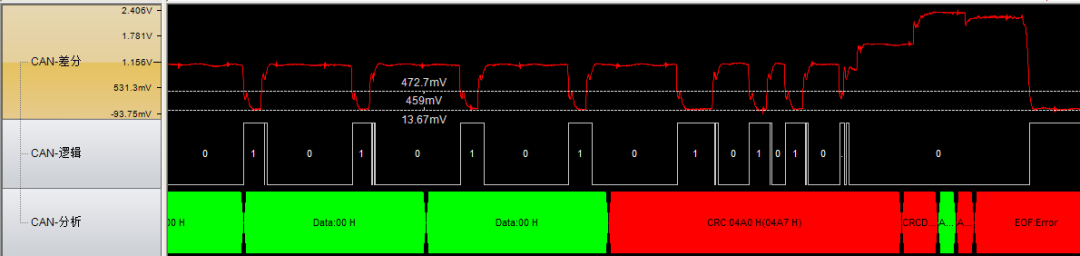
圖5 錯誤波形圖
圖6為卡車打開/關閉大燈時,耦合到CAN總線上的干擾,導致的錯誤。
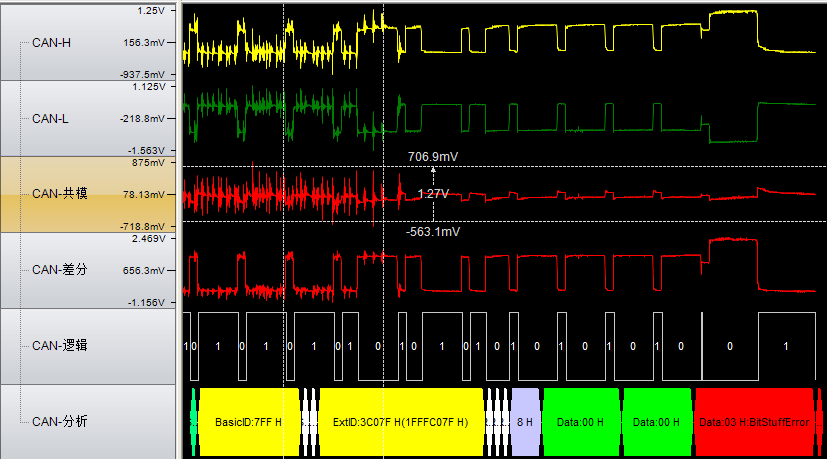
圖6 錯誤波形圖
圖7為波特率異常(位寬度從2us突然變成1.6us),導致位錯誤。
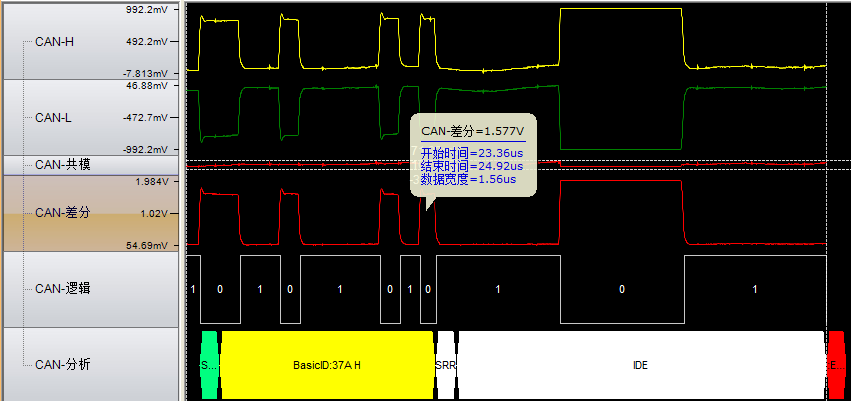
圖7 錯誤波形圖
CAN總線的錯誤都有哪些形式,相互之間有什么樣的關系,以及總線的檢測與校驗的原理是什么?
CAN總線的錯誤幀可分為位錯誤、位填充錯誤、CRC錯誤、格式錯誤、應答錯誤五大類,每類錯誤的具體解釋如圖8所示,此圖簡潔明了的展現了各種錯誤。

圖8 CAN總線錯誤類型
CAN報文傳輸過程中出現通訊錯誤,會發送錯誤幀,以上所述的錯誤幀類型中根據其錯誤標識符不同,可分為“主動錯誤”和“被動錯誤”。
主動錯誤:檢測錯誤主動報錯,發出錯誤標識符(連續6個顯性位)和錯誤界定符(連續8個隱形位);目的在于“主動”通知錯誤,即使別的節點沒有發現此錯誤;
被動錯誤:檢測錯誤,被動等待其他節點報錯后發送錯誤標識符(連續6個隱形位)和錯誤標識符(連續8個隱形位);目的在于識別錯誤,回應主動錯誤。
總線關閉:節點不參與總線通訊。
為了避免某個設備因為自身原因(例如硬件損壞)導致無法正常收發數據而不斷地破壞數據幀,從而影響其他正常節點通訊,CAN-bus規范中規定每個CAN控制器都有一個發送錯誤計數器和一個接收錯誤計數器。根據計數值不同CAN節點會處于不同的設備狀態,狀態之間的轉換關系如圖9所示。
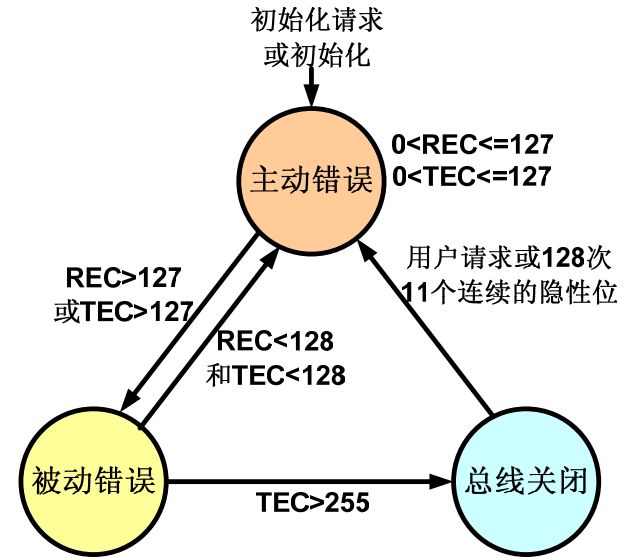
圖9 錯誤轉換圖
接收、發送錯誤計數器對應的變動條件及數值變動情況:
接收單元檢測出錯誤時,檢測到錯誤標識符或過載標志的“位錯誤”除外,此時REC+1、TEC不變;
接收單元在發送完錯誤標志后檢測到第一位為顯性電平,此時REC+8、TEC不變;
發送單元輸出錯誤標志,此時REC不變、TEC+8;
發送單元發送主動錯誤標志或過載標志,檢測出位錯誤,REC不變、TEC+8;
接收單元發送主動錯誤標志或過載標志,檢測出位錯誤,REC+8、TEC不變;
各單元從主動錯誤標志、過載標志的開始檢測出連續14個顯性位,之后每檢測出連續8個顯性位,發送時REC+8、接收時TEC+8;
檢測出被動錯誤標志后追加連續8個位的顯性位,發送時REC+8、接收時TEC+8;
發送單元正常接收數據結束時(返回ACK且到幀結束位檢測到錯誤),REC不變、TEC-1;
接收單元正常接收數據結束時(到CRC未檢測出錯誤且正常返回ACK),REC<127時,REC-1,REC>127時,REC=127;TEC不變;
處于總線關閉的單元,檢測到128次連續11個位的隱形位,錯誤計數器歸零,REC、TEC=0;
CAN總線錯誤處理功能屬于是鏈路層功能,此功能由CAN控制器決定,圖10為CAN控制介紹圖,其中詳細介紹與錯誤處理有關的部分:位流處理器、位邏輯控制、錯誤管理邏輯。
位流處理器(BSP)是一個控制發送緩沖器、接收FIFO和CAN總線之間數據流的程序裝置,它還執行總線上的錯誤檢測、仲載、總線填充和錯誤處理。
位時序邏輯(BTL)監視串行的CAN總線和位時序,它在信息開頭“弱勢支配”的總線傳輸時,同步CAN總線位流(硬同步),接收報文時再次同步下一次傳送(軟同步)。
錯誤管理邏輯(EML)負責限制傳輸層模塊的錯誤,它接收來自位流處理器的出錯報告,然后把有關錯誤統計告訴位流處理器和接口管理邏輯(IML)。
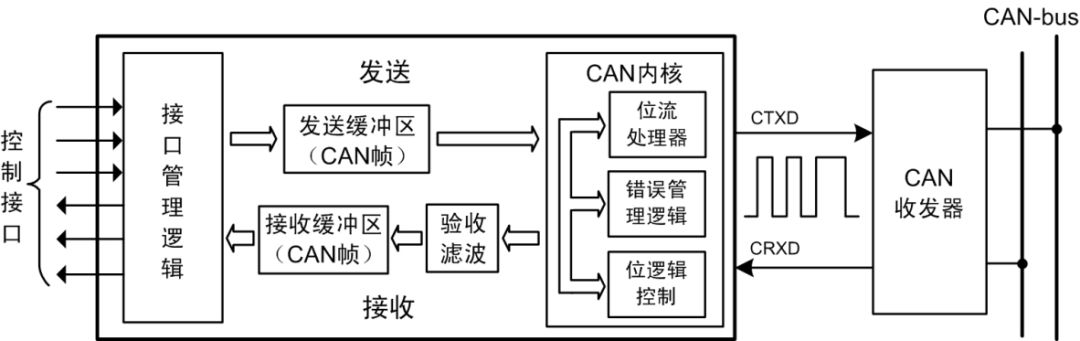
圖10 CAN控制器
CAN控制器的信號從CAN收發器的TXD發送到總線,同時被RXD收回進行檢測,以此達到實時的接收錯誤檢測、發送錯誤檢測與ID仲裁功能。CAN總線是如何保證數據傳輸可靠性的,以下介紹CAN總線獨有的檢測機制:位流檢測和CRC校驗。
位流檢測:即位檢測,如圖11所示節點在發送過程中,同時會監測自身發送的位數值,假如檢測到位與自身送出的位數值不同,則會提示位錯誤;
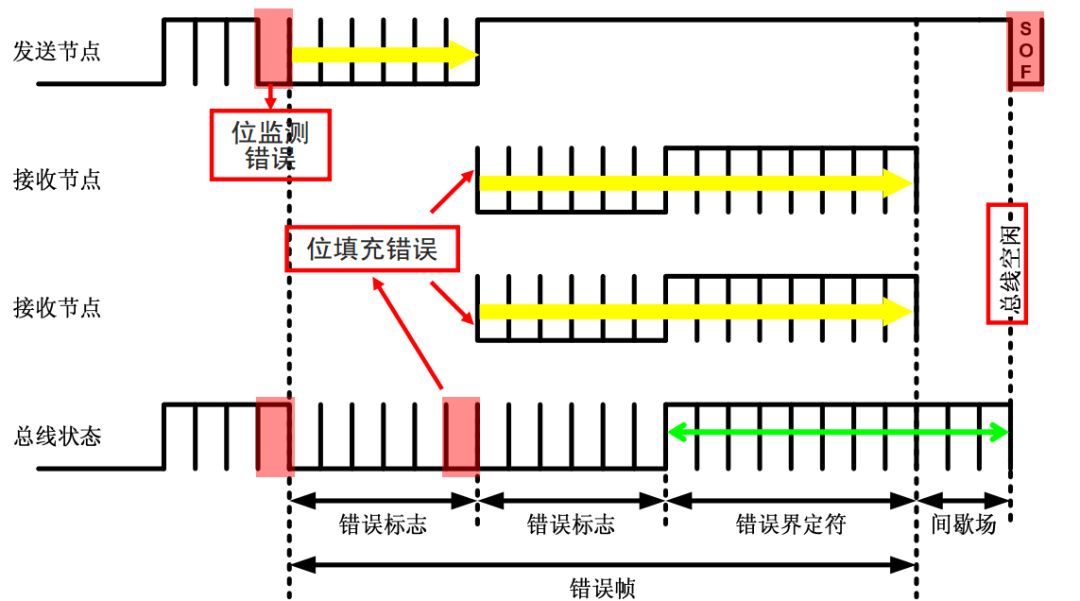
圖11 位檢測
CRC校驗:即循環冗余校驗碼是數據通訊領域中最常用的一種差錯校驗碼,其信息字段和校驗字段的長度可任意選定;CRC校驗過程是通過循環計算冗余校驗碼的方式實現的,CAN控制器內部CRC的實現是基于多項式發生器和一個15位寄存器;其意義在于保證傳輸數據的正確性,未經CRC校驗檢測出的錯誤低于10負九次方。
CANscope總線分析儀是一款綜合性的CAN總線開發與測試的專業工具,集海量存儲示波器、網絡分析儀、誤碼率分析儀、協議分析儀及可靠性測試工具于一身,并把各種儀器有機的整合和關聯,如圖12所示CANscope的軟件界面圖;重新定義CAN總線的開發測試方法,可對CAN網絡通訊正確性、可靠性、合理性進行多角度全方位的評估;幫助用戶快速定位故障節點,解決CAN總線應用的各種問題,是CAN總線開發測試的終極工具。
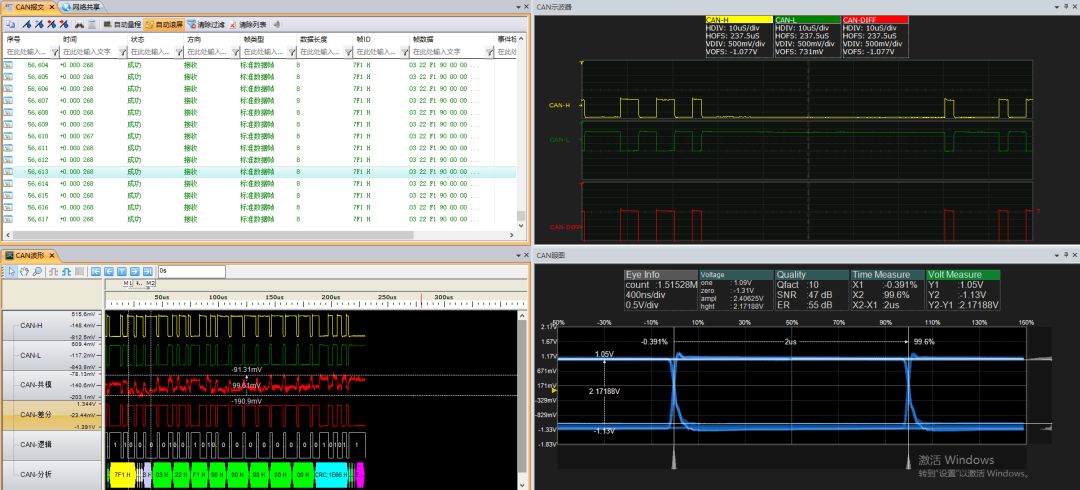
圖12 CANscope軟件界面
-
CAN總線
+關注
關注
145文章
1946瀏覽量
130727 -
crc
+關注
關注
0文章
199瀏覽量
29461
原文標題:CAN總線錯誤檢測機制
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

虹科干貨 | 帶你全面認識“CAN總線錯誤”(二)——CAN錯誤類型

虹科干貨 | 帶你全面了解“CAN總線錯誤”(三)——CAN節點狀態與錯誤計數器
虹科干貨 | 帶你全面認識“CAN總線錯誤”(一)——CAN總線錯誤與錯誤幀
虹科干貨 | 帶你全面認識“CAN總線錯誤”(二)——CAN錯誤類型
虹科干貨 | 帶你全面了解“CAN總線錯誤”(四)——在實踐中生成和記錄CAN錯誤
科普系列:CAN總線錯誤幀及排查方法簡介


詳解TSMaster CAN 與 CANFD 的 CRC E2E 校驗方法






 工商網監
工商網監
評論