 工業機器人在激光熔覆中的應用
工業機器人在激光熔覆中的應用
當今社會是一個科技飛速發展和進步的時代,傳統技術逐漸趨于現代化技術,機器人也從科幻想象中走到了現實生活,相比較我們對于工業機器人的定義和理解也不再是具有頭、腦、四肢、驅趕的人形機器這一簡單的思維模式。工業領域對于機器人提出的最早概念為:借助伺服技術控制機器人的關節,利用操作者對機器人進行動作示教,機器人按照要求能實現動作的運行。這就是目前所謂的示教操作。當今的機器人幾乎都采用這種控制方式。這個也就是目前對于工業機器人在技術領域中的說明。靈活的機械手臂可以隨意按照操作者的要求進行動作,在可以替代人手進行操作的同時,也可以實現遠程監控,預先編程等自動控制功能,因此可以應用在危險或有危害的環境之中。文章即對激光熔覆的應用方法和領域以及如何來使用機器人技術實現工作進行介紹。
一、激光熔覆的原理、特點和方式
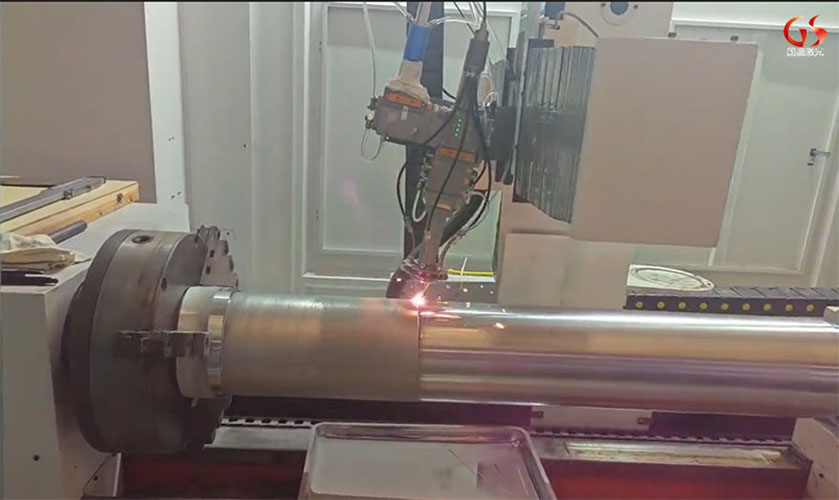
激光熔覆是指用不同的添料方式在被熔覆物體基體表面上放置選擇好的涂層材料,再經激光輻照使之和基體表面上的一薄層同時熔化,并快速凝固后形成稀釋度極低, 與基體成冶金結合的表面涂層,從而達到顯著改善基層表面的耐腐蝕、耐磨損、耐高溫、抗氧化及部分電氣特性的工藝方法。工件表面改性或修復的目的,是為了既滿足對材料表面特定性能的要求,又節約大量的貴重元素的不必要消耗。當前激光熔覆的使用情況,其主要應用于幾個方面:對材料的表面改性,如軋輥、燃汽輪機葉片、軋輥、齒輪等,用以增加其使用性能;產品的表面修復,如轉子、鉆頭等,據統計其修復費用不到重置價格的1/5,而且縮短了維修時間,解決了大型企業重大成套設備連續可靠運行所必須解決的關鍵部件快速搶修難題;另外通過激光熔覆技術在模具的表面覆著一層超耐磨抗腐蝕合金,可以大大提高其使用壽命。
目前應用廣泛的激光熔覆材料主要有:鎳基、鈷基、鐵基合金、碳化鎢復合材料等。其中,又以鎳基材料應用最多,與鈷基材料相比,其價格便宜。與傳統的堆焊、 電鍍、噴涂和氣相沉積技術相比,激光熔覆技術具有如下幾個優點。
(1) 冷卻速度快,快速凝固過程,使工件容易得到細結晶組織或產生平衡態所無法得到的非穩態、非晶態等新相。
(2) 涂層稀釋率低,與被加工件基體形成牢固的冶金結合或界面擴散結合,通過對激光工藝功率、光斑大小及焦距等參數的調整,可以獲得良好的涂層,并且成分和稀釋度均可控。
(3) 熱畸變較小,采用高功率密度快速熔覆時,變形可控制降低到零件的裝配公差內。
(4) 粉末選擇幾乎不需要任何限制,可以按照工藝要求使用任意種類配比的粉末材料,尤其是在低熔點金屬表面熔敷高熔點合金。
(5) 能進行選區熔覆,使得材料消耗減少,提高性能價格比。
(6) 激光光束可以對難以接近的區域進行熔覆,主要保證光斑及粉末可以照射到該區域即可。
(7) 熔覆層的厚度范圍大,可以對同一部位進行往復重復熔覆。
激光熔覆的工藝參數主要有激光功率、激光光斑直徑、熔覆行走速度、光斑離焦量、粉末送粉速度、掃描速度、預熱溫度等。這些參數對熔覆層的稀釋率、表面粗糙度、裂紋以及熔覆零件的致密性等有很大影響。各參數之間也相互影響,相互匹配,是一個非常復雜的過程,須采用合理的控制方法將這些參數控制在激光熔覆工藝允許的范圍內。同時修復工作是一個非標準化的動作,不同于生產線上的批量產品。工件損壞的位置大多為隨機的,即使是常磨損的也只是極少數產品之間的相同部位, 而且很多部位表面不一定是直線或有規律的曲面,這就需要加工頭在一套熔覆動作中需要根據要求以很多不同的姿態進行工作,傳統的多軸機床很難實現,通常是使用操作人員手工操作加工頭進行人工作業,同時如前所述,還要及時根據情況調整工藝參數的匹配,這對于操作人員的技術手法、熟練程度以及專注度等要求將非常高。而且這種激光熔覆方法會產生被加工區的高溫、激光反射或照射的危害、加工產生的電弧光以及粉末飛濺產生的空氣粉塵污染等問題,都會對一線操作人員的身體健康造成危害。目前工業是上使用的機器人,其機械手臂在很多動作上可以模擬人的手臂進行動作,同時其強大的電氣控制功能可以將熔覆工藝要求的參數預置在系統中進行及時的調用和搭配,機器人可以在運行的命令中加入各種外部控制指令,從而使得這項工作可以在預先編程設定之后進行無人化工作,避免對操作人員造成危害的同時也防止大工件長時間工作產生的疲勞。而且機器人在參數的控制上也人工方式要準確很多。
二、工業機器人
工業機器人在工業生產中可以代替人工區做某些單調、頻繁和重復的長時間作業,或是危險、惡劣的工作環境下,包括沖壓、鍛造、鑄造、熱處理、涂裝、焊接、塑料制品成形、機械加工和簡單裝配等工作,以及在核能工業等領域中,完成對人體有害的物料進行搬運或工藝操作。
控制技術原理:使用機器人控制系統來決定機器人功能和性能,主要任務是控制工業機器人在工作中的空間運動位置、動作的時間、姿態和軌跡及操作順序等。除了具有好的人機交互界面外,還有編程簡單、軟件菜單或在線操作提示和上手方便等特點。其關鍵的技術包括:開放性模塊化的控制系統體系結構、模塊化層次化的控制器軟件系統、機器人的故障診斷與安全維護技術、網絡化機器人控制器技術等。
文中介紹所使用的是靈活度較高的六軸類手臂型的機器人,這種機器人的姿態和自由度都非常大,其主體包括臂部、腕部和手部,有的機器人還有第七軸行走機構。具有6個運動自由度,其中腕部通常有3個運動自由度;驅動系統用以使執行機構產生相應的動作;控制系統則按照輸入的程序對驅動系統和執行機構發出指令信號,并進行控制。
因此,使用這種類手臂的工業機器人,在激光修復工作中既可以替代人工手動操作避免人為的手動誤差,又可以準確的設定加工參數實現即時有效的控制,還可以避免工作中環境因素對人體的傷害。兩種先進技術的有效融合使得零件修補這種傳統工作變得更加具有發展前景。
-
工業機器人
+關注
關注
91文章
3360瀏覽量
92624 -
激光熔覆
+關注
關注
0文章
135瀏覽量
7075
原文標題:資訊 | “工業機器人+激光熔覆” 打造全新增材制造
文章出處:【微信號:SRA2009,微信公眾號:深圳市機器人協會】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業機器人在五個領域的應用

渦輪盤的激光熔覆修復及渦輪葉片激光熔覆修復工藝


激光熔覆技術的常見應用行業









 工商網監
工商網監
評論