 關于基于模糊邏輯的汽車障礙物探測系統設計
關于基于模糊邏輯的汽車障礙物探測系統設計
0 引言
據國家統計局統計,駕駛員自身因素和行車低于安全車距是造成交通事故的主要因素。同時,隨著汽車數量的增加,導致道路狀況變得十分復雜,交通事故頻頻發生,不僅對人身安全造成嚴重傷害,而且每年因為交通事故導致的經濟損失也高達數千萬。因此,交通安全問題成為不能忽視的重大社會問題。
現今的障礙物探測傳感器大多數是采用超聲波傳感器,因為利用超聲波探測障礙物時有很多優點,例如它對雨、雪、霧等的穿透力強,衰減小,可以在雨雪等惡劣天氣下正常工作[1]。但是,超聲波探測物體時的方向性較差,用單一的傳感器只能探測基本處于正前方的物體的距離,而不能判定被探測物體的方向。模糊邏輯理論在判斷不確定性問題時具有良好的理論基礎,將其與超聲波傳感器結合使用,可以使設計方案進一步優化,方向判斷更加準確[2-5]。
本文所設計的車輛障礙物探測系統,是利用模糊邏輯理論和數據融合的思想,由多個超聲波傳感器組成探測網絡,對障礙物進行距離和方位的探測[6-7]。此外,本探測系統可進一步實現GPS定位功能,能實時顯示車輛的位置信息和周邊信息,同時具有語音提醒功能,在緊急情況時及時通知駕駛員減速、注意前方有障礙物等,以此來減小交通事故發生的可能性,也可以實現停車安全、尋車管理等方面的功能。
1 超聲波測距原理
汽車超聲波障礙物探測系統利用了超聲波測距原理:

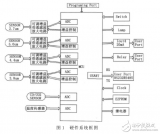
式中:S為待測距離,v為聲音在空氣中的傳播速度,Δt為超聲波從發射聲波到接收的時間差。本文汽車超聲波障礙物探測系統的結構框圖如圖1所示。當汽車在行駛過程中,超聲波傳感器也處于工作狀態,裝置在汽車周圍的超聲波傳感器探頭發送超聲波,遇到障礙后產生回波,超聲波接收器將接收到的信號傳回主控單元,由主控單元利用模糊邏輯和數據融合算法完成數據的分析處理,并判斷出障礙物的距離和方位,如果處在閾值范圍內,語音模塊將會發出警告信息,提示駕駛員進行相應的操作[8]。
2 硬件設計
由圖1可以看出,本文的超聲波障礙物探測系統由主控單元、語音播報模塊、GPS模塊和多個超聲波傳感器等構成。在主控單元中采用模糊邏輯和數據融合的思想對采集到的信息進行分析,判斷出障礙物的具體距離和方位信息。
2.1 主控單元
主控單元是整個系統設計的核心,控制著整個系統的正常工作,承擔著各個模塊之間的數據融合,并利用相應算法對數據進行判斷和處理。本設計使用STM32-F103RDT6作為主控單元,在主控單元上搭載μC/OS-Ⅲ實時操作系統,并利用USART串口通信實現主控單元與各個模塊之間的數據通信和主控單元對各個模塊的控制和調度,以此來保證系統的實時性和穩定性。
2.2 超聲波障礙物探測網絡
超聲波障礙物探測網絡是本設計的核心,包括發射和接收兩部分。選取的是US40-16C超聲波探測器,它具有發送超聲波和接收超聲波一體化的結構特性,這樣就節省了很大的安裝空間。同時,US40-16C超聲波探測器具有較大的探測范圍(輻射范圍大約為75°)和較長的探測距離,可以通過其測得前方18 m之內障礙物的距離信息。
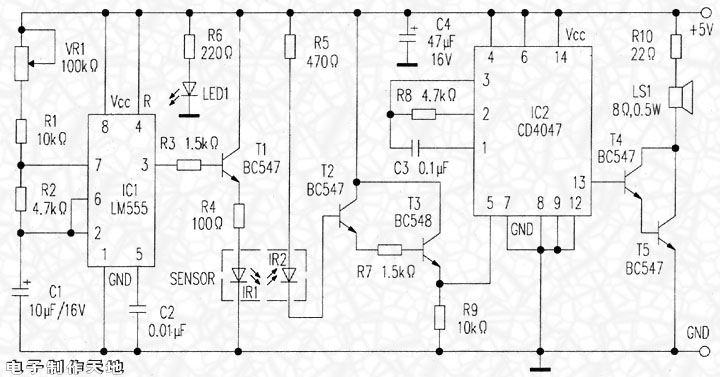
系統超聲波發射電路是由超聲波驅動電路和超聲波傳感器網絡組成。超聲波發射電路如圖2所示,其中STM32的高級定時器TIM1輸出40 kHz、占空比為50%的互補PWM信號,分別傳輸到SP3232的T1IN和T2IN,然后產生+6 V和-6 V的電壓,并且在T1Out和T2Out端產生12 V的電壓驅動超聲波傳感器發射40 kHz的超聲波,每次發射8個周期脈沖。電路通過9013三極管來控制SP3232電源的開關,發射之前打開SP3232的電源,等到電路穩定后開始發射超聲波,并在發射之后關閉SP3232的電源。這樣不僅可降低發射電路對接收電路的干擾,而且還可以降低功耗[9]。
超聲波接收電路的主要作用是接收超聲波信號,它由信號整形部分和信號采集部分組成。由于反射波信號會由于距離的增大而減小,因此本系統利用NE5532對發射信號進行放大、濾波處理。超聲波接收電路如圖3所示。
超聲波探測器在測量物體距離上具有很好的優勢,但是在探測物體的實際方位時存在很大的缺陷,而現實中障礙物可能存在于汽車的任何方位。為了實現汽車周圍障礙物距離和方位的同時測量,本系統使用6個超聲波傳感器,每3個放置在同一水平高度不同指向(車頭和車尾),編號依次是1、2、3、4、5、6。根據傳感器網絡所采集的障礙物的位置信息將傳感器網絡劃分為10個區域,編號依次是 A、B、C、D、E、F、G、H、I、J,前5個分別表示汽車車頭的左方、左前方、前方、右前方、右方區域,后5個分別表示汽車車尾的左方、左后方、后方、右后方、右方區域。當探測器網絡探測到障礙物后,將利用模糊邏輯算法進行數據融合,通過隸屬度函數判斷出障礙物的距離和方位信息。
3 軟件設計
由于1、2、3和4、5、6傳感器呈對稱設計,因此本文只研究車頭部位的1、2、3傳感器網絡,如圖4所示。
由于障礙物可能出現在不同的探測區域,同一個超聲波傳感器會采集到不同的數據,因此使用多次反射法來探測障礙物的位置信息。多次反射法就是在傳感器探測網絡運行時,第一次傳感器1發出超聲波信號,同時使1、2、3號傳感器處于接收回波模式狀態,當檢測到回波時,會把各個探測器測到的障礙物的距離信息進行存儲。但是,如果障礙物的距離超過傳感器的探測范圍時,也就是探測器不會探測到障礙物時會自動存為0。第二次使2號傳感器發出探測信號,1、2、3號同時接收信號并存儲距離信息;第三次使3號傳感器發出探測信號,1、2、3號同時接收信號并存儲距離信息。
經過上述的探測過程,會得到9個障礙物距離數據,并存儲到一個3×3的向量空間中。由于障礙物出現在不同區域時,相同傳感器獲得的數據不同,所以可以利用模糊邏輯理論中的隸屬度函數關系來探測障礙物的距離和方位信息。本傳感器網絡采用以障礙物距離為變量的隸屬度函數,距離越小,隸屬關系越大。因此,可以利用測得的距離數據定義一個隸屬度函數[10]:
式中,i=1,2,3為探測傳感器的編號;rij為第i號傳感器接收第j號傳感器的回波所測得的障礙物的距離,j=1,2,3;uij為第i號探測器探測時,障礙物對傳感器j的隸屬度。由式(2)可以得到一個隸屬度空間:
在隸屬度空間中,矩陣的每一列都是障礙物對第j號傳感器的隸屬度,因此對矩陣的每一列進行求和運算,如式(4)所示:
由式(4)可以求得障礙物對第j號傳感器的隸屬度的總和 根據
根據 的大小,通過計算得δ=0.05。根據δ與
的大小,通過計算得δ=0.05。根據δ與 的關系可判斷障礙物位于圖4的5個設定區域中的哪一個,如表1所示。
的關系可判斷障礙物位于圖4的5個設定區域中的哪一個,如表1所示。
其算法為:
利用此方法,可以判斷出障礙物的實際方位。
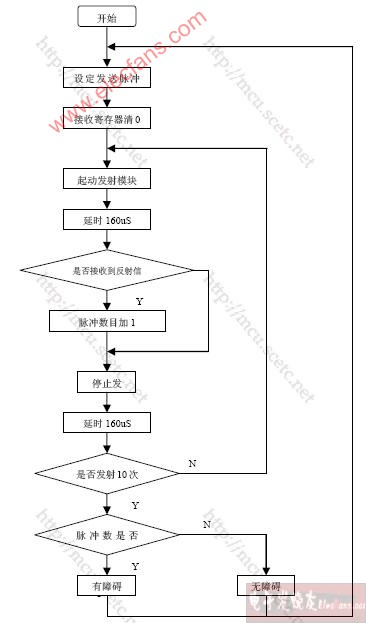
假定將傳感器網絡中探測警戒閾值設置為a=150 cm,當傳感器網絡探測到障礙物時,如果距離小于150 cm時,語音模塊將會發出提示警告。具體的工作流程如圖5所示。
4 實驗結果分析
本文介紹了傳感器網絡對于障礙物位置信息的測試方法,通過此方法不僅可以測得障礙物的距離信息,還可以測得障礙物的方位信息,使障礙物的位置信息更加明確。例如,試驗中將障礙物放置在距離傳感器網絡150 cm處的A、B、C、D、E區域中進行測試,得到測試結果如表2所示。
當今世界上做得較好的汽車避障系統要數奔馳S級轎車應用的Distronic Plus技術[11]。該系統可以測得汽車前方物體的相對距離,如果汽車處于危險范圍內,系統將會通過警示燈和蜂鳴器發出警報信號,提醒駕駛員減速、避障等操作,但是駕駛員并不能掌握汽車盲區的障礙物信息。此外,在汽車倒車雷達系統方面,平原大學朱利娜[12]、重慶科技學院高月華[13]、西安航空學院王莘[14]雖然對超聲波測距進行創新和優化,但是一方面采用單個超聲波傳感器只能測得障礙物的距離,并不能測得障礙物的方位信息;另一方面,測得障礙物位置信息誤差大,因此對駕駛員判斷障礙物的具體位置還是存在一定的缺陷,而且對汽車前部和尾部的盲區檢測不到。本系統采用三相超聲波傳感器網絡不僅可以測得障礙物的距離信息,還可以測得障礙物的方位信息,對駕駛員判斷障礙物的具體位置有非常好的輔助作用。
5 結語
本文設計的傳感器網絡利用了模糊邏輯理論和數據融合算法思想,不僅可以實現傳統超聲波傳感器測量障礙物距離的功能,而且還可以實現測量障礙物方位的功能,能夠準確地判定障礙物的具體信息。在測量障礙物時采用了多次反射法,提高了測量的準確性和穩定性,對保障行車安全具有重要意義。
本文的車輛防碰撞系統未來還可以配合機器視覺判斷障礙物形狀及位置,有益于實現行車/停車安全、尋車管理等功能,在無人駕駛技術領域具有廣闊的應用空間。
-
傳感器
+關注
關注
2550文章
51039瀏覽量
753094 -
接收器
+關注
關注
14文章
2468瀏覽量
71875 -
超聲波
+關注
關注
63文章
3014瀏覽量
138350
發布評論請先 登錄
相關推薦
基于超聲波傳感器的自主移動機器人的探測系統
做卷簾門障礙物探測器,求指教!
做卷簾門障礙物探測器,求指教!
BSD盲點探測系統
基于超聲波傳感器的自主移動機器人探測系統
紅外線障礙物探測器相關資料分享
蘋果再獲得激光專利:“障礙物探測”系統
地下車庫CO探測系統的設置與安裝
測距避障傳感器在城市軌道障礙物探測系統中的應用技術方案





 工商網監
工商網監
評論