") 10個(gè)經(jīng)典機(jī)械結(jié)構(gòu)動(dòng)圖包括了間歇轉(zhuǎn)動(dòng)機(jī)構(gòu),擺動(dòng)電機(jī),定位機(jī)構(gòu)等
10個(gè)經(jīng)典機(jī)械結(jié)構(gòu)動(dòng)圖包括了間歇轉(zhuǎn)動(dòng)機(jī)構(gòu),擺動(dòng)電機(jī),定位機(jī)構(gòu)等
90°間歇轉(zhuǎn)動(dòng)機(jī)構(gòu)

180°間歇轉(zhuǎn)動(dòng)機(jī)構(gòu)
不完全齒輪傳動(dòng)機(jī)構(gòu)
擺動(dòng)電機(jī)
不完全齒輪傳動(dòng)機(jī)構(gòu)
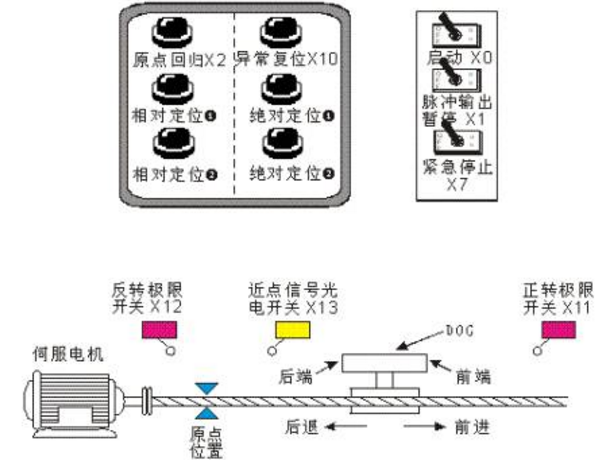
定位機(jī)構(gòu)
滾筒破碎機(jī)
可剎車的推車
可剎車的有軌小車可調(diào)壓縮比例活塞
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9000瀏覽量
145337 -
齒輪
+關(guān)注
關(guān)注
3文章
266瀏覽量
25111 -
機(jī)械結(jié)構(gòu)
+關(guān)注
關(guān)注
3文章
27瀏覽量
4724
原文標(biāo)題:10個(gè)經(jīng)典機(jī)械結(jié)構(gòu)動(dòng)圖,認(rèn)真看肯定有收獲
文章出處:【微信號(hào):indRobot,微信公眾號(hào):工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
令人驚艷的機(jī)械原理動(dòng)態(tài)圖,美翻了!(多圖,流量party謹(jǐn)慎)
過(guò)程中保持方向不變7.阿基米得氏曲線驅(qū)動(dòng)機(jī)8.錐面摩擦變速器9.日內(nèi)瓦結(jié)構(gòu)內(nèi)部10.將中斷旋轉(zhuǎn)變?yōu)檫B續(xù)旋轉(zhuǎn) 另外還有熱心金粉為我們提供的機(jī)械動(dòng)態(tài)圖
發(fā)表于 08-24 10:54
PCB傳送機(jī)構(gòu)的組成
(Programmable Width Control,PWC),以適應(yīng)不同產(chǎn)品的板寬,如圖1所示。 圖1 傳送機(jī)構(gòu)結(jié)構(gòu)圖 在貼片過(guò)程中,板支撐能通過(guò)支撐PCB使其翹曲、松弛和柔性降到最小。如圖2所示,板
發(fā)表于 09-04 16:04
電動(dòng)機(jī)原理動(dòng)圖,讓你更快了解
。轉(zhuǎn)動(dòng)部分有環(huán)形鐵心和繞在環(huán)形鐵心上的繞組(其中2個(gè)小圓圈是為了方便表示該位置上的導(dǎo)體電勢(shì)或電流的方向而設(shè)置的) 。步進(jìn)電動(dòng)機(jī)步進(jìn)電動(dòng)機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步
發(fā)表于 10-11 11:06
步進(jìn)電機(jī)在包裝機(jī)械中的應(yīng)用
距角,當(dāng)停止的位置確定以后,也就決定了步進(jìn)電機(jī)需要給定的脈沖數(shù)。在包裝機(jī)控制中,給定脈沖數(shù)的多少,還與機(jī)構(gòu)的參數(shù)有關(guān),例如螺桿的直徑等。在包裝機(jī)械
發(fā)表于 10-12 10:57
復(fù)雜的機(jī)械傳動(dòng)原理動(dòng)圖,工程師都能看一整天
由手部、運(yùn)動(dòng)機(jī)構(gòu)和控制系統(tǒng)三大部分組成。手部是用來(lái)抓持工件(或工具)的部件,根據(jù)被抓持物件的形狀、尺寸、重量、材料和作業(yè)要求而有多種結(jié)構(gòu)形式,如夾持型、托持型和吸附型等。運(yùn)動(dòng)機(jī)構(gòu),使手
發(fā)表于 10-12 10:13
一般機(jī)器人驅(qū)動(dòng)機(jī)構(gòu)中電機(jī)的選擇問(wèn)題
在機(jī)器人中,執(zhí)行機(jī)構(gòu)一般分為液壓驅(qū)動(dòng)和電機(jī)驅(qū)動(dòng)兩種類型,其中又以電機(jī)驅(qū)動(dòng)最為常見(jiàn)。本文主要討論一般機(jī)器人驅(qū)動(dòng)機(jī)構(gòu)中電機(jī)的選擇問(wèn)題。機(jī)器人中常
發(fā)表于 08-27 07:46
舵機(jī)構(gòu)成工作原理
、直流電機(jī)、控制電路板等部件組成。工作原理:控制電路板接受來(lái)自信號(hào)線的控制信號(hào),控制電機(jī)轉(zhuǎn)動(dòng),電機(jī)帶動(dòng)一系列齒輪組,減速后傳動(dòng)至輸出舵盤(pán)。舵
發(fā)表于 09-13 07:58
什么是機(jī)構(gòu)?
什么是機(jī)構(gòu)呢?
機(jī)構(gòu)可以定義為:是一個(gè)具有確定的機(jī)械運(yùn)動(dòng)的構(gòu)件系統(tǒng),或稱它是用來(lái)傳遞運(yùn)動(dòng)和動(dòng)力的可動(dòng)裝置。1、
發(fā)表于 04-11 10:03
?1.1w次閱讀
自動(dòng)機(jī)械設(shè)計(jì)
發(fā)展水平。主要內(nèi)容包括自動(dòng)機(jī)械設(shè)計(jì)原理、自動(dòng)機(jī)械的總體設(shè)計(jì)、驅(qū)動(dòng)系統(tǒng)的設(shè)計(jì)、自動(dòng)機(jī)械傳動(dòng)系統(tǒng)的設(shè)計(jì)、執(zhí)行機(jī)構(gòu)的運(yùn)動(dòng)規(guī)律及
發(fā)表于 08-02 08:54
?0次下載
PLC控制步進(jìn)電機(jī)實(shí)例,實(shí)現(xiàn)機(jī)構(gòu)原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位
由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過(guò)PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功
電機(jī)直驅(qū)式操動(dòng)機(jī)構(gòu)設(shè)計(jì)
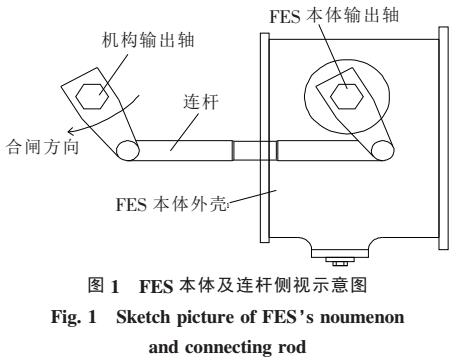
為克服現(xiàn)有快速接地開(kāi)關(guān)受環(huán)境影響大等缺點(diǎn),設(shè)計(jì)研究了一套電機(jī)直驅(qū)式操動(dòng)機(jī)構(gòu)。電機(jī)直驅(qū)式操動(dòng)機(jī)構(gòu)
發(fā)表于 02-01 17:30
?0次下載
12 kV真空斷路器永磁直線電機(jī)操動(dòng)機(jī)構(gòu)特性分析
為解決12 kV真空斷路器(Vacuum Circuit Breaker, VCB)傳統(tǒng)操動(dòng)機(jī)構(gòu)和旋轉(zhuǎn)電機(jī)操動(dòng)機(jī)構(gòu)結(jié)構(gòu)復(fù)雜、可靠性低、動(dòng)作分散性大以及有槽直線
發(fā)表于 03-02 14:48
?1次下載
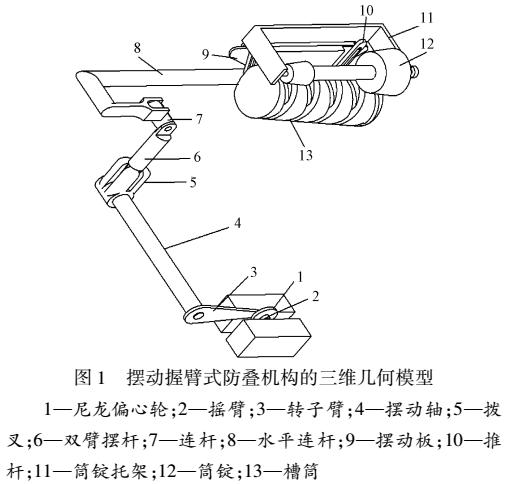
擺動(dòng)握臂式防疊機(jī)構(gòu)模態(tài)分析
針對(duì)擺動(dòng)握臂式防疊機(jī)構(gòu)的振動(dòng)性能對(duì)其結(jié)構(gòu)穩(wěn)定性及防疊對(duì)象筒紗質(zhì)量的直接影響,對(duì)擺動(dòng)握臂式防疊機(jī)構(gòu)的振動(dòng)特性進(jìn)行了研究。首先利用Pro/E與A
發(fā)表于 03-14 14:58
?0次下載
機(jī)械設(shè)計(jì):常見(jiàn)的間歇運(yùn)動(dòng)機(jī)構(gòu)原理動(dòng)圖
當(dāng)搖桿順時(shí)針擺動(dòng)時(shí),鉸接在桿上的棘爪插入棘輪的齒內(nèi),使棘輪同時(shí)轉(zhuǎn)過(guò)一定角度。當(dāng)搖桿逆時(shí)針擺動(dòng)時(shí),棘爪在棘輪的齒上滑過(guò),棘輪靜止不動(dòng)。這樣,當(dāng)搖桿作連續(xù)的往復(fù)擺動(dòng)時(shí),棘輪便得到單向的間歇
電機(jī)如何實(shí)現(xiàn)左右擺動(dòng)
? 1. 直流電機(jī)左右擺動(dòng)的原理 直流電機(jī)是一種通常用來(lái)將電能轉(zhuǎn)化為機(jī)械能的設(shè)備。它的構(gòu)造很簡(jiǎn)單,包括一





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論