 直流電子負載的光伏MPPT算法詳解
直流電子負載的光伏MPPT算法詳解
許多光伏(PV)器件――包括光伏板和聚光光伏(CPV)模塊等――都需要進行戶外測試,以驗證其設計的正確性、耐用性和安全性。在測試戶外光伏器件輸出功率時,一種較為經濟的方法是使用直流電子負載(eload);直流電子負載能夠以較低的成本提供大功率處理能力。
通常,戶外光伏測試涉及到的一個主要函數就是最大功率點跟蹤(MPPT)。但由于電子負載是通用儀器,光伏測試工程師需要在測試軟件中使用算法來執行最大功率點跟蹤。幸運的是,有許多最大功率點跟蹤算法可供選擇,而且在公開發表的論文中有超過 19 篇論述了各種最大功率點跟蹤算法的實施與執行 [1]。但是,這些算法都是針對太陽能逆變器設計的。不同測試系統的逆變器各不相同,所以適用于逆變器的最大功率點跟蹤算法未必適合光伏測試系統。本文介紹了一種非常適用于通過電子負載執行光伏測試的最大功率點跟蹤算法,而且還探討了如何應用該算法及其為何適用于戶外光伏測試系統的最大功率點跟蹤。
在逆變器和電子負載中實施特定大功率點跟蹤算法的最大差異是 I/O 時延。在逆變器中,最大功率點跟蹤算法在內部微處理器上運行,該微處理器可以在幾微秒內進行測量、計算和負載調整。使用定制軟件進行同樣的操作時,由于計算機和電子負載之間存在不可避免的 I/O 時延,測量的時間很容易超過幾十毫秒。這個 I/O 時延便是影響跟蹤速度的主要瓶頸。為此,我們使用以下三項標準來選擇和修改本文中討論的最大功率點跟蹤算法,充分滿足光伏測試系統的需求:
1.更少的 I/O 處理次數:由于 I/O 處理次數影響最大功率點跟蹤的速度,因此 I/O 處理的數量必須少,以保證在任何環境條件下都具有足夠的跟蹤響應。
2.執行的簡便性:如果光伏測試中存在典型的時間和預算限制,而且您不想花費太多時間實施復雜的最大功率點跟蹤算法,因為這只是測試計劃中的一小部分。
3.MPP 測量精度:測試數據必須精確、可靠,以便恰當地驗證光伏設計的性能。
在介紹可滿足上述標準的算法之前,我們先簡單地討論一下電子負載。電子負載是一個可以接收和測量功率源(電源或光伏器件)輸出功率的工具。同可變電阻器一樣,電子負載可以進行調節來控制正在接收的功率大小。電子負載可以測量通過的壓降和正在接收的電流。其典型的工作模式有三種:恒定電壓、恒定電流和恒定電阻。即使電子負載連接的電源輸出功率發生變化,電子負載的模式設置都將保持不變。例如,如果電子負載連接到一個光伏板的輸出端并設置為 25 V 的恒壓(CV)模式,那么當光伏板的 I-V 曲線發生變化時,該電子負載會通過調節其內部的電阻來保持 25 V 的恒定電壓。如果光伏板的最大電壓(Voc)降至 25 V以下,那么電子負載將斷開,它兩側的電壓將等于 Voc 的實際值。在光伏測試中,電子負載經常使用恒壓(CV)模式,因此本文將使用這種模式來定義算法。
電子負載最大功率點跟蹤算法
這種通過電子負載執行最大功率點跟蹤的算法是電導增量(IC)算法的修正版,我們稱之為電子負載電導增量(ICE)最大功率點跟蹤算法。如欲了解逆變器 IC 算法的詳細信息,請查看論文“Maximum Photovoltaic Power Tracking: an Algorithm for Rapidly Changing Atmospheric Conditions(最大光伏功率跟蹤:適用于快速變化的大氣條件的算法)”[2]。ICE 算法是通過比較光伏器件輸出的增量電導和瞬時電導來進行運算。這些值顯示了 I-V 曲線的測量結果變化,從而告訴我們是否跟蹤到最大功率點(MPP),如果沒有的話,能夠通過什么方法來接近曲線并找到 MPP。ICE 算法中用來跟蹤最大功率點的 V 和 I 的數學關系如下:
在最大功率點上 dP/dV = 0
在最大功率點右側 dP/dV 《 0
在最大功率點左側 dP/dV 》 0
其中 dP 是指功率變化,并且等于 d(IV)。
當然,我們無法精確地計算出 dI、dV 或 dP。但是我們可以使用以下關系式:?P = Pn – Pp、?V = Vn – Vp 和 ?I = In – Ip 來估算近似值,此處“P”代表之前測得的值,“n”代表新測得的值。使用上述關系式我們可以得出:是處在 I-V 曲線的最大功率點(MPP)上還是在其左側(最大功率點的電壓值或 Vmp 處于較低的電壓電平)或其右側(Vmp 處于較高的電壓電平)。請見圖 1。
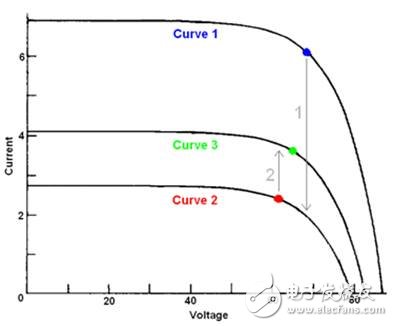
圖 1 光伏 I-V 曲線
圖中文字中英對照:
如圖 1 中的 ICE 實例所示,使用電子負載在三條 I-V 曲線上執行最大功率點跟蹤。電子負載設置為恒壓(CV)模式。每條曲線上的彩色點代表該曲線的最大功率點(MPP)。起始點為曲線 1 上的最大功率點(藍點)。電子負載的 CV 設置為 Vmp,而且我們已測量和存儲了該點的電流和電壓值。一旦發生變化,便由曲線 1 轉到曲線 2。如果現在測量電流和電壓,此時電壓保持不變(因為該電子負載是恒壓模式),但是電流會發生變化,因此可知我們已不在最大功率點上。由于電子負載是恒壓模式,我們現在處在灰色箭頭“1”所指的曲線 2 的相應點上。通過下列關系式,我們可知道應選擇什么方法來找到新的最大功率點:如果 dI (使用 dI ≈ ?I = In – Ip 來估算)是負值,則我們現在處于最大功率點的右側,需要向左側移動(降低 CV 設置),反之,如果 dI 是正值,便進行相反的操作。在此實例中,由曲線 1 移到曲線 2,dI 將變成負值,因此需要降低 CV 設置以便找到新的最大功率點。我們可通過設置某個電壓步長(稱為 Vinc)來降低 CV 值。現在,我們將處在一個不同的電壓和電流電平上,所以需要使用這兩個參數來決定下一步的操作。由于剛才在曲線 2 上向最大功率點移近了一些,那么 dP 是正值而 dV 為負值,因此仍需向最大功率點的左側移動。繼續增加 CV 設置直到 dP 值等于零,這意味著該點將不再有斜率(實際上不可能達到 dP=0,但稍后將解釋這個問題)。達到曲線2 的最大功率點之后,我們將轉向曲線 3,那么我們現在位于灰色箭頭“2”所指的曲線 3 上。因為電壓仍保持不變,我們需要再次通過測量電流變化來檢測所發生的變化。這時 dI 是正值,因此可知現在我們處于最大功率點的左側,需要通過 Vinc 增加恒壓(CV)設置(移向曲線的右側),來找到最大功率點。
可能您已注意到:由于 ?P 和 ?V 只是近似于 dP 和 dV,那么 dP/dV = 0 (?P/?V = 0)等式就不能實現。事實上,由于我們正在通過逐步升高或降低電壓來尋找最大功率點,dV 將始終由 Vinc 的大小來決定,我們無法從其得知何時處于最大功率點,所以真正需要關注的只是 dP。我們需要找出某個誤差值 E,如果滿足 E ≥ dP ≥ -E 的條件,那么電子負載就是在最大功率點(MPP)上。如果 E 值太小,則 ICE 算法的結果將在 MPP 左右擺動。
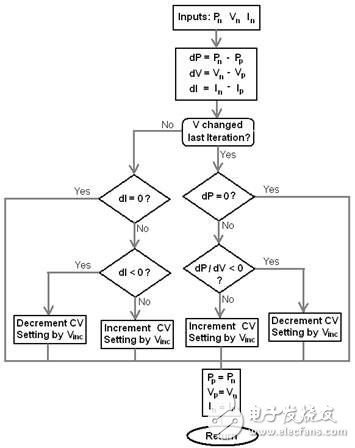
請參見圖2,圖中顯示了如何執行 ICE 最大功率點跟蹤算法的流程圖。
圖 2 修正后的電導增量流程圖
圖中文字中英對照:
在圖 2 所示的 ICE 流程圖中,寫著“上次迭代電壓是否改變”的方框正在檢查在此算法的上次迭代過程中恒壓(CV)設置是否發生改變。如果沒有變化,說明我們正好處在上次迭代的最大功率點上,因此可知上次迭代和本次迭代之間電壓沒有變化。我們只需測量電流即可確定是否仍處在最大功率點上。如果不是,那么我們需要通過什么方法調整 CV 設置才能找到最大功率點。這樣可以減少 I/O 處理次數,如前所述,I/O 處理次數是在測試系統中執行最大功率點跟蹤的主要瓶頸。
我們可以通過兩種方法來確定 IC 算法的最初點或起始點。第一種方法是通過在 Voc 到 0 V 之間步進電子負載電壓來執行 I-V 掃描,并在每次步進中測量電流和電壓。以數組的方式保存電流和電壓并將這些數組相乘得出每次步進的功率數組。找到功率步進數組中的最大值,它就是最初 I-V 曲線的最大功率點。將在 MPP(即 Vmp)上測得的電壓值作為電子負載和 ICE 算法的最初恒壓起始點。
另一種方法稍微簡單但精度較低,即測量 Voc 并將恒壓起始點設置為測得的 Voc 值乘以 0.75。該方法算出的點通常不是最初曲線的最大功率點,但是比較接近。當曲線發生變化時,IC 算法將跟蹤至新曲線的實際最大功率點。
選擇 Vinc 值時,您需要考慮多種因素,比如光伏器件的功率范圍、天氣變化、理想的跟蹤速率和期望的最大功率點精度。選擇的 Vinc 值越大,跟蹤最大功率點的速度越快;選擇的 Vinc 值越小,測得的最大功率點越精確。dI 的幅度也可提供與最大功率點距離的信息。為了加快最大功率跟蹤速度,您可以用變化幅度乘以 Vinc 值,來更高效地執行最大功率跟蹤。如果 dI 值較大,則可以選擇較大的 Vinc,因為您知道距離最大功率點還比較遠。反之亦然:如果 dI 值較小,則應使用較小的 Vinc,因為只需一點變化即可找到最大功率點。
基礎比較
在對執行 ICE 算法的結果進行測試和分析之前,我們先將這種算法與其他算法做個比較。用來進行比較的算法是“擾動觀察”算法(P&O)。P&O 可能是最直觀的最大功率點跟蹤算法;它被認為是最大功率點跟蹤的粗略近似算法。P&O 方法是從曲線上的當前位置(我們稱之為原點)稍微移動到原點旁的新位置,然后在新位置上進行電壓和電流測量并計算出功率。之后比較計算出的功率電平和原點的功率電平。如果新位置上的功率比原點上的功率高,那么應向 MPP 移動,當前位置現在就變成了原點。如果當前位置的功率低于原點的功率,那么應背向 MPP 移動。隨后在原點的另一邊重復上述步驟。如果原點的功率高于與其緊鄰的兩個點的功率,則原點便是 MPP。測試特定的最大功率點跟蹤算法時,經常使用 P&O 最大功率點跟蹤算法作為比較的標準。關于執行 P&O 算法及其缺陷的更多信息,請參見“Comparative Study of Maximum Power Point Tracking Algorithms(最大功率點跟蹤算法的比較研究)”一文。 [1]。
ICE 性能結果
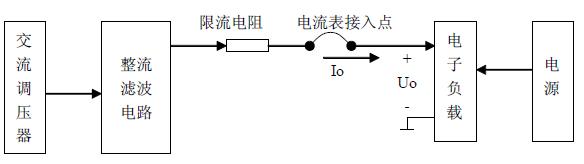
我們可以使用兩種算法進行性能測試。兩個主要的測試標準分別是最大功率點跟蹤的速度和精度。使用尋找 MPP 時進行的 I/O 處理次數(測量結果和 CV 變化)計算 MPP 的速度,因為 I/O 時延比執行其他任何操作(比如數學計算)所用的時間都要多。我們使用 Agilent N3300A 直流電子負載作為最大功率點跟蹤器,來完成此項性能測試。為了仿真光伏器件輸出,我們使用了 Agilent E4360A 模塊化太陽能電池陣列仿真器(SAS)。該 SAS 的 I-V 曲線輸出是根據光伏板而生成的,光伏板在 1000 W/m^2 的輻照源及常溫 25℃的條件下可達到以下技術指標:
MPP = 130.6 W Voc = 25 V Isc = 7.9 A Vmp = 19.2 V Imp = 6.8 A
使用以上 I-V 曲線技術指標,我們可以根據不同的輻照等級和溫度值創建出 17 條 I-V 曲線,并將這些曲線存儲在 SAS中。我們使用 Agilent VEE 編程語言創建執行每種算法的程序。因此在運行算法之前,我們已經確定了程序發送和接收電子負載測量結果所需的平均時延,以及調節電子負載 CV 設置所需的時間。為了保證良好的電壓和電流測試精度,測量應間隔 16.67 毫秒,以消除交流線路中的功率噪聲。執行測量所需的平均時間是 43 毫秒。進行恒壓調節的平均時間為 3.4 毫秒。在每次負載變化以后,我們增加 10 毫秒的設置時間,所以一個完整的 CV 變化平均耗時 13.4 毫秒。為了提高速度, IC 算法使用了兩種電壓步長:100 mV 和 800 mV。步長取決于 ?P 或 ?I 的幅度。P&O 算法使用了 100 mV 的電壓步長。我們使用上述兩種算法進行測試,并測量找到 17 條I-V 曲線的最大功率點所用的時間和最大功率點的精度。請在圖 3 中查看測試結果。
圖 3. 最大功率點跟蹤測試結果
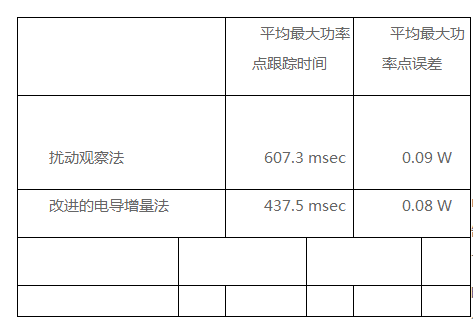
ICE 算法具有良好的最大功率點跟蹤精度,平均誤差只有 80 mW。當然,您能夠通過縮短電壓步長(這會降低跟蹤速度)來控制精度。ICE 比 P&O 的速度快了39%。在本測試實例中,我們使用了兩種電壓步長,但可以通過增加程序中電壓步長大小來加快算法的執行速度,從而根據變化的幅度進行選擇。增加電壓步長的開銷很小,而且在程序中增加幾個“if/else”命令即可。
總結
目前針對逆變器實施和執行各種最大功率點跟蹤算法,有很多信息資源可供參考。但是光伏測試系統的 I/O 速度和用途不同于逆變器。鑒于以上差異,本文介紹了一種非常適用于通過電子負載執行最大功率點跟蹤的最大功率點跟蹤算法。ICE 算法執行簡單,并提供良好的最大功率點跟蹤速度和精度,其最大優點是可以通過調整電壓步長和創建多種電壓步進(可根據不同曲線間的變化幅度進行選擇)來調諧最大功率點跟蹤精度和速度,從而滿足您的需求。有關各種最大功率點跟蹤算法的更多信息,請參閱論文 [1] 和 [3]。
-
直流電子負載
+關注
關注
1文章
73瀏覽量
15187 -
光伏MPPT
+關注
關注
0文章
8瀏覽量
2152
發布評論請先 登錄
相關推薦
請問如何利用直流電子負載實現光伏電池組件MPPT
直流電子負載測試方法研究
KIKUSUI菊水DC直流電子負載型號說明






 工商網監
工商網監
評論