 一種適用于北斗MEO/IGSO衛星的弱信號捕獲算法
一種適用于北斗MEO/IGSO衛星的弱信號捕獲算法
針對北斗B1頻段MEO/IGSO衛星上NH碼調制導致捕獲難度增大的問題,對GPS所用的差分捕獲算法進行改進,得出了一種適合北斗B1 MEO/IGSO衛星的捕獲算法。通過本地生成經NH調制的C/A碼作為新的偽隨機碼,加長相干積分時間,以差分累加的方式對相干積分結果進行運算,并按照累加結果最大準則判斷差分項的符號,找出最佳搭配組合。仿真結果表明,改進算法能提高2 dB~3 dB的增益。
0 引言
信號捕獲是處理衛星信號的必要步驟,其結果對于后續跟蹤、定位解算的精度有很大的影響[1]。尤其是在復雜環境中,弱信號的捕獲技術一直是限制衛星導航技術應用的關鍵因素[2-4]。其中差分相干算法在全球定位系統(Global Positioning System,GPS)弱信號捕獲中已經被廣泛應用,然而對于調制NH碼的北斗B1中地球軌道/傾斜地球同步軌道(Medium Earth Orbit/Inclined Geosynchronous Orbit,MEO/IGSO)衛星,直接使用差分捕獲算法不能達到捕獲弱信號的目的。經過NH(Neumann-Hoffman)調制雖然提高了抗窄帶干擾能力、增強了衛星信號的相關性,但也帶入了更多的比特跳變[5-7]。為了能夠充分利用差分捕獲算法的優勢,文獻[8]介紹了一種四分法與差分相干結合的改進算法,這種算法對導航數據跳變進行了估計,提高了數據利用率,但這種算法只適合于北斗GEO;文獻[9]提出了的一種基于復數型差分相關的弱信號快速捕獲算法,削弱了NH碼相位變化的影響,但對比特跳變的影響沒做過多的處理;文獻[10]基于差分相干與短時匹配濾波器和快速傅里葉變換,并利用最小二乘擬合,可以得到更精確的捕獲多普勒頻率值,但算法復雜度也比較高,不利于硬件實現。
本文擬從減弱比特跳變的影響和加長積分時間兩方面著手對差分算法進行改進,分析二次調制對衛星信號的影響,估計差分項的符號,以期提高捕獲靈敏度。
1 捕獲原理
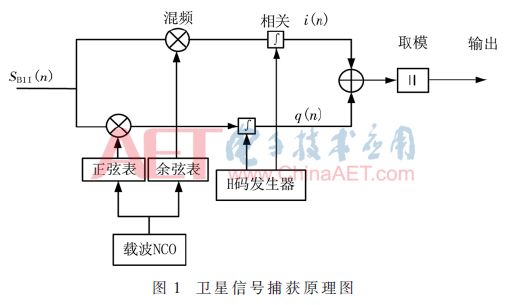
衛星信號的捕獲即是對中頻數字信號進行解調以及解擴的過程。經過二次調制的導航電文實現了二次擴頻,因此通過二次解擴才能有效地捕獲到衛星信號。本文中把經二次調制的測距碼認定為一種新的碼(NH),只需實現NH碼的解擴。判斷解調與解擴之后的相關峰值,超過捕獲預設門限則捕獲成功。
常用的衛星信號捕獲方法有串行捕獲和并行捕獲,本次實驗使用基于FFT的并行碼相位捕獲算法。捕獲原理如圖1所示。
經過數模轉換后的SB1I數字中頻輸入信號數學表達式為[11]:
式中,k為參與相干積分的離散點數。通過不斷調整多普勒頻率和延遲,當τ=τL以及fd=fLd時,S(τ,fd)的值最大。相干積分處理增益與相干時間呈正相關,但導航數據的跳變使得相干積分不能無限制使用,因此一般使用非相干或差分相干的方式對相干積分結果進行累加來提高信噪比。
非相干積分是對每次相干積分取模后平方的值進行累加。數學原理如式(6)所示,由于進行了平方操作,因此非相干積分可以消除導航數據跳變的影響,有效提高信號的信噪比。但信號平方的同時噪聲也進行了平方,且經過平方的噪聲不能通過累加抵消,這樣會帶來很大的平方損耗[12],因此針對弱信號捕獲一般使用差分相干技術。
2 改進算法
2.1 新本地碼生成
常規的捕獲算法中是以C/A碼作為本地碼與衛星信號進行匹配,北斗衛星C/A碼的長度為1 ms,由于NH調制的存在,因此每次相干積分的時間只能為1 ms。若超過1 ms,NH碼相位的跳變會導致相干積分結果的衰減。
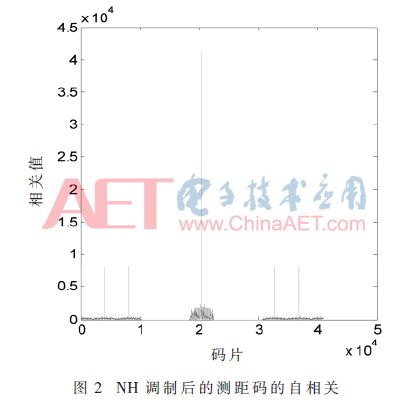
本文以NH二次調制的偽碼作為新的本地碼,稱為新本地碼。新本地碼的相關性如圖2所示,可以看出經NH碼二次調制的測距碼也有良好的自相關特性,雖然在其他碼片處也會出現相關峰值,但與主峰相比較低,不影響捕獲結果。從圖中可以看出相鄰峰值的差值為
2 046的倍數,所以在捕獲結果中會出現相對較低的其他峰值,這些峰值之間的距離為2 046的整數倍(若碼片精度為一個碼片)。經過二次調制的測距碼與導航電文具有相同的周期,測距碼的起始跳變沿即為導航電文的跳變沿,因此完全解擴后的相干積分時間段內不存在導航電文的跳變,消除了由此帶來的相關功率損耗。新本地碼長度為20 ms,因此可以與衛星信號進行長達20 ms的相干積分,極大地提高了處理增益。
2.2 差分相干算法及改進
將M×L ms的數據分為M等份,對每L ms數據與本地C/A碼相關,結果為Ck′(τ,fd)(k′=1,2,3,…,M)。把前一時刻相干矩陣與后一時刻相干積分矩陣共軛的乘積進行累加即為差分相干。其表達式為:
對差分相干結果進行分析,第K′個相干積分矩陣Ck′可以表示為有用信號Vk′和噪聲Nk′之和,前一時刻相干積分結果Vk′與后一時刻的相干積分結果Vk′+1是相關的,而噪聲項中隨機噪聲與信號、噪聲與噪聲之間是不相關的,同時噪聲項也具備零均值高斯噪聲的特點,可以通過累加抵消。因此差分相干既可以達到增強信噪比的目的,又可降低平方損耗。相較于非相干積分,相干積分可以提高處理增益。
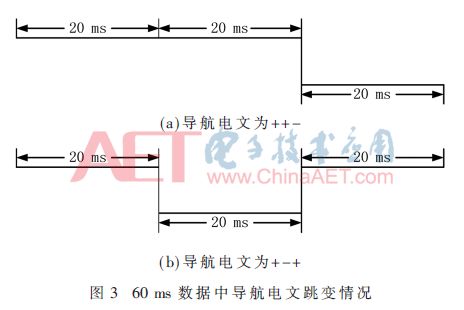
北斗非同步衛星NH碼和導航電文的周期相同,NH碼的起點即導航電文的跳變沿,因此以20 ms進行相干積分時不需要考慮積分時間段內導航電文的跳變。導航電文只有1和-1兩種情況,取60 ms數據,H碼已經對齊,對于圖3(a)所示只有一次導航電文跳變的情況,倆次差分結果的累加和為0,存在數據的正負抵消;對于圖3(b)所示的有2次導航跳變的情況,2次差分結果的累加和為-2,沒有數據的抵消。以隨機事件進行分析,在3 bit導航電文中只出現一次導航電文跳變的概率為1/4。這對于系統增益會有很大的損失。
針對這種情況,本文對每20 ms所對應的導航電文進行極性估計,導航電文極性的改變不會影響輸入信號和本地信號的載波和碼相位,因此可以通過改變差分項的符號來消除導航跳變引起的系統處理增益的損失。對于導航電文為1,-1,-1,1 ,1,-1,-1,1的160 ms數據進行差分,其結果為-1,1,-1,1,-1,1,-1。對差分結果的符號進行判斷,假定第一個差分結果的符號為+,則差分項符號只有在+ - + - + - +的情況下累加結果最大。每個差分項都有兩種可能的符號,因此20×(M+1) ms數據的差分項符號會有2M種組合。遍歷2M種組合,找出相關值的最大值,此值所對應的差分項符號的組合即為最佳路徑。最佳路徑估計的實質是要找出使每次累加的值都在增大且其最終累加結果最大的符號組合。因此可以不必遍歷2M種組合,快速找出最佳路徑。
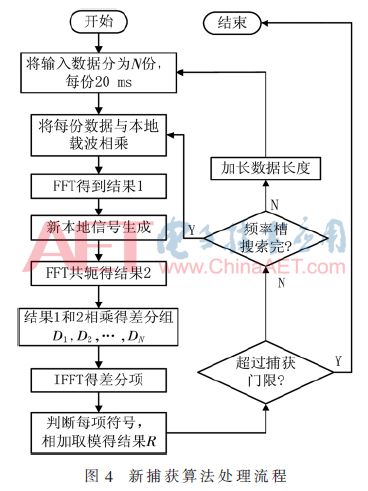
本文中所用的是并行碼相位捕獲算法,其所有碼相位的搜索是通過兩次FFT和一次IFFT同時完成的。因此一個頻率槽對應一個路徑。設差分矩陣為D,本地多普勒頻率為f,差分項符號為A1,A2,A3,…,AM。令A1=1,E1=D1。詳細過程描述如下:
(1)令S1=D1+D2,S2=D1-D2。若|S1|>|S2|,則A2=1,E1=S1,否則A2=-1,E1=S2;
(2)令S1=E1+D3,S2=E1-D3。若|S1|>|S2|,則A3=1,E1=S1,否則A3=-1,E1=S2。
重復執行以上步驟,直到求出AM的符號。從所有頻率所對應的路徑中,選出使E1最大的路徑。比特估計算法同樣適用于GEO衛星,需要注意弱信號對于頻率偏移較敏感,因此用這種算法捕獲弱信號時,必須加長相干積分的時間,否則可能增加誤捕率。新捕獲算法的算法流程如圖4所示。
3 實驗與分析
利用MATLAB對該算法進行仿真,實驗中選用矩陣電子的多星座導航信號模擬器(型號為GNS-8332)產生衛星信號。可以通過配置通道參數生成不同功率的北斗B1射頻信號,其最低可以產生-189 dBm的弱信號。采用萊特信息科技的多天線衛星中頻信號采樣器(型號為LT-
C-002)進行衛星數據采集,采樣頻率為20 MHz。中心頻率為2.902 MHz,多普勒頻率為-3 000~3 000 Hz。
模擬器產生北斗6號星的信號,其功率為-140 dBm,相干積分時間為20 ms,差分相干次數為10。如圖5常規差分相干的捕獲結果所示,多普勒頻率和碼相位分別為-1 500 Hz和31 563,最大相關峰值為3.02×1010。圖6為經過比特最佳估計的差分相干捕獲結果。其最佳比特為1 1 1 1 1 -1 1 1 -1 -1,多普勒頻率與碼相位與圖5中相同,最大峰值為5.3×1010。從圖中可以看出,改進后的算法比常規差分相關峰值有明顯的增高。從兩張圖中都可以看出除主峰之外的其他峰值,這與二次調制的測距碼相關性有關,同時在頻率軸上主峰倆側會出現次峰,這是由于NH碼未完全對齊,導致積分時間段內有導航數據跳變所引起,不影響捕獲結果。
通過模擬器以1 dBm不斷衰減信號功率,測試算法捕獲極限,對功率降低至-142 dBm的北斗非同步衛星信號進行實驗,積分方式與實驗一相同,比較兩種算法的結果。此時傳統差分相干捕獲算法已經不能捕獲到信號,而改進的差分相干算法在-142 dBm時仍有明顯的峰值。繼續衰減信號功率,當信號功率低于-145 dBm時,改進的差分算法不再有明顯相關。利用兩種方法對多組數據進行捕獲,其結果表明改進的算法能比常規差分捕獲算法提高2 dB~3 dB的增益。
4 結語
本文對適用于GPS的弱信號捕獲方法進行了改進,提出一種適用于北斗MEO/IGSO衛星的弱信號捕獲算法。該算法利用經NH調制的測距碼的良好自相關性,進行20 ms的長數據相干,并對差分算法進行最佳比特估計。由于計算機內存的限制,本實驗最多可以處理220 ms的數據,能夠實現-145 dBm的弱信號捕獲。若加長數據長度,可以實現更弱信號的捕獲。
-
算法
+關注
關注
23文章
4646瀏覽量
93717 -
衛星
+關注
關注
18文章
1730瀏覽量
67581 -
北斗
+關注
關注
3文章
625瀏覽量
36364
原文標題:【學術論文】北斗B1 MEO/IGSO衛星信號的差分捕獲算法
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種適用于無線通信系統的半盲ICA算法
SKYLAB細聊“北斗+GPS”多模衛星定位模塊
GPS北斗衛星+慣性組合導航模塊的優勢分析
一種適用于室內復雜環境的高精度、環境自適應性強的定位算法
一種適用于空間觀測任務的實時多目標識別算法分享
一種適用于可視電話的快速運動估計算法

一種適用于軟件無線電的數字調制與解調算法的詳細說明

導航不是GPS嗎,有人用北斗嗎?

一種適用于FPGA實現的盲均衡算法
一種適用于動態場景的多層次地圖構建算法






 工商網監
工商網監
評論