 SWARM和MAS的原理與無人機蜂群作戰技術的
SWARM和MAS的原理與無人機蜂群作戰技術的
物聯網的這種控制模式下協作物件的集群(SWARM)將是未來研究的一個方向之一,英特爾公司的500架無人機編隊組成復雜圖案的智能模式,是復雜的邊緣側計算的未來熱點。
但是只是關注SWARM的趨勢,卻不知道SWARM的原理,這篇文章很好的闡述了SWARM的原理。相信這篇文章對物聯網研究者會有啟發!
1
概述
無人蜂群作戰是指一組具備部分自主能力的無人機在有/無人操作裝置輔助下,實現無人機間的實時數據通信、多機編隊、協同作戰,并在操作員的指引下完成滲透偵查、誘騙干擾、集群攻擊等一系列作戰任務。無人蜂群作戰系統可填補戰術與戰略之間的空白,以多元化投送方式快速投送到目標區域執行多樣化軍事任務,包括與其他武器平臺協同攻擊海上、空中、地面目標及ISR等,實現對熱點地區戰略威懾、戰役對抗、戰術行動。
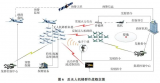
無人機蜂群一般由一組承擔不同作戰任務的無人機群組成,其執行任務簡單的流程如下圖所示:由大型運輸機作為母船前出至任務區域并釋放無人機組,無人機蜂群進行編隊并俯沖至任務區域展開協同作戰行動,任務完成后返回母船。
圖1無人機集群作戰流程
最初無人蜂群作戰技術來源于多智能體系統理論,一般將無人機蜂群作戰技術中的無人機視為智能體(Agent),執行任務的無人機編隊視為一個多智能體系統(Multi-agent Systems)。本文將從理論角度簡單介紹無人機蜂群作戰技術與其背后的多智能體系統理論之間千絲萬縷的聯系。
2
前世
一.多智能體系統(MAS)理論的發展
群體行為(Swarming Behavior)是自然界中常見的現象,典型的例子如編隊遷徙的鳥群、結隊巡游的魚群、協同工作的蟻群、聚集而生的細菌群落等等。這些現象的共同特征是一定數量的自主個體通過相互合作和自組織,在集體層面上呈現出有序的協同運動和行為。
因此在該方面的研究早期,大量的工作集中在對自然界生物群體建模仿真上。學者們通過大量的實驗數據,探究個體行為,個體與個體之間關系對群組整體行為表現的影響。1987年,Reynolds提出一種Boid模型,這種模型的特點為:(1)聚集:使整個組群中的智能體緊密相鄰;(2)距離保持:相鄰智能體保持安全距離;(3)運動匹配: 相鄰智能體運動狀態相同。這種模型大體概括描述了自然界中群體的運動特征。1995年,Vicsek等人提出一種粒子群模型,這種模型中每個粒子以相同的單位速度運動,方向則取其鄰居粒子方向的平均值。該模型僅實現了粒子群整體的方向一致性,而忽略了每個粒子的碰撞避免,但是仍為群體智能體建模方面做出了重要貢獻。
圖2自然界中生物群集活動現象,其中最主要的特點是群集活動中的個體生物可以依據相鄰個體狀態自主規劃自身狀態
圖31995年Vicsek提出的粒子群模型,可以看出在一段時間之后所有粒子最終都沿著相同方向運動
隨后,對多智能體系統的研究進入“網絡化系統與圖論描述”階段。具體是指:群體系統是由許多個體通過某種特定的相互作用所形成的一類網絡化系統。個體之間的相互作用關系在數學上可以利用圖論方法進行描述和研究。在此階段,學者們在對自然生物群落建模仿真的基礎上,從對表象模擬推演層面跨越到從理論角度探尋個體與系統整體之間的關系層面。最近,針對多智能體系統理論的研究進入實際應用階段。大量的工作側重于實際問題,尤其是工業、戰爭應用中出現的問題。無人蜂群作戰技術就是誕生于該階段。
圖4 多智能體系統理論發展歷程
二.多智能體系統(MAS)理論的特點
從個體與系統的角度分析,多智能體系統具有“個體智能+通信網絡=整體運動行為”特點。其中,“個體智能”是指組成群體系統的每個個體都具有一定的自主能力,包括一定程度的自我運動控制、局部范圍內的信息傳感、處理和通信能力等。例如車流的形成和維持過程中,每個司機通常只能根據其前后左右的相鄰車輛的運動狀態(相對距離和速度)來調整自己的運動狀態。基于共同的加速或減速規則,可以形成車流在整體上的有序運動。
圖5車流中的車無法獲取整體車群的運動情況,只能相鄰車輛進行加速或者減速
綜上所述,多智能體系統具有如下特點:
(1)分布式:又稱去中心化。整個群集系統中不存在中心控制器控制所有的智能體,每個智能體均具有一定的自主能力。該特點使得多智能體系統具有良好的魯棒性,具體表現為執行任務的無人機蜂群中即使有若干架無人機因故障或者被攻擊喪失功能,剩下的無人機可以在重新組網之后繼續執行任務,提高了戰場生存能力。
(2)智能體自主化:顧名思義智能體是指具備一定的位置共享,路徑規劃及障礙規避能力。具體表現為蜂群中的無人機可以根據一定的規則自主飛行,將指揮員從繁重的作戰任務中解脫出來,必要時又可以進行人工干預。
(3)復雜功能分布式化:當要求一個對象具備多種復雜功能時,難以設計合適的控制方案對其進行控制。在多智能體系統中,多個結構功能相對簡單的智能體可以通過協同的方式完成多種復雜的任務。具體表現為可以對無人蜂群作戰系統中的無人機裝備不同設備與武器來完成滲透偵查,火力壓制以及目標摧毀等多種作戰要求。
3
今生
一.當前軍用無人機作戰在實戰運用中存在的主要問題
當前軍用無人機主要存在如下兩方面問題:
1.單機機載功能有限:
(1)單機機載設備的偵察能力有限,很難有效地全方位連續偵查和監視目標;
(2)單機的武器載荷有限,使打擊威力和效果受到限制;
(3)被賦予任務日趨復雜多樣,需要的傳感器數量和種類不斷增加;
2.單機抗未知因素能力弱:
(1)一旦發生設備故障,容易導致任務被延誤,甚至被迫取消;
(2)在面臨高威脅防空體系時,容易被攔截和毀傷,導致任務失敗;
(3)地面控制鏈路較難對多架無人機同時控制,導致空中無人機數量偏少;
為了解決上述諸多問題,各軍事強國對在未來無人機作戰研究及發展的思路上有著不同的發展方向,如隱身化、高速化、小微型化、大型化等。但均意識到無人機單機的作戰能力已很難有較大提高。因此提出了一種新的無人機作戰方式那就是蜂群作戰技術。
圖6 高空投放的密集固定翼無人機編隊組網協同作戰
二.無人機蜂群作戰技術中有關MAS的關鍵技術
1.無人機蜂群作戰系統中的同/異構主體問題
無人機蜂群作戰技術的理念是對自然界中蜂蜜和螞蟻族群的仿真,并且該系統中要同時兼備實施偵察,攻擊以及防御等功能。蜂群中的無人機所攜帶的作戰武器,通信設備存在一定的差別,因此無人蜂群作戰系統包含了豐富的異構主體(Heterogeneous Agents)。
(注:一般地,在MAS理論中,如果系統中的所有智能體的動力學模型均相同,那么稱該多智能體系統中的智能體是同構的,反之則是異構的。)
目前針對無人機蜂群作戰技術作用機理的研究僅限于4種形式即:近戰(Melee)、聚合(Massing)、機動(Maneuver)和群集(Swarming)。并未形成符合現代戰爭特點的技術-戰術集成體系。
在有人-無人機(蜂群)協同作戰方面,作為空中指揮者的有人機其機載武器、通信設備等均與蜂群中的無人機不同,因此可以將有人-無人機協同作戰系統視為一個異構動力學的多智能體系統。
圖7 美國海軍公開X-47B與F/A-18協同測試的照片
2014年8月,美海軍首次進行有人駕駛艦載機與艦載無人機在航母上共同起降。在試驗中,兩架F/A-18“大黃蜂”戰斗機和一架X-47B艦載無人機以相同的模式從“羅斯福”號核動力航母上起飛,以此來測試這種艦載無人機的起飛和降落能力。有人機與無人機協同作戰難在空中控制,美國今后研究的重點是無人機的空中控制能力。
2.無人機蜂群作戰系統中的通信拓撲網絡問題
在多智能體系統理論中,數學上一般使用圖論來描述智能體(無人機)之間的通信拓撲結構。從通信方向方面分類有:有向拓撲與無向拓撲;從通信拓撲結構方面分類則有:固定拓撲與時變切換拓撲。在無人機蜂群作戰技術方面,一般采用時變切換拓撲結構,在執行不同任務時無人機之間可以采用不同的通信拓撲結構連接,在任務完成之后又可以切斷連接。
圖8控制多個對象時采用的三種控制/通信結構
3.無人機蜂群作戰系統中的飛行編隊控制問題
在無人蜂群作戰系統中執行任務的無人機最基本的動作要求就是可以保持一定的隊形進行編隊飛行。現對已經提出的關于多自主飛行器協同編隊方法進行討論:
(1)領導者-跟隨者(Leader-follower)法。在該方法模擬鳥群編隊飛行的生 物活動,將一個無人機指定為領導者(即長機),其他無人機則被指定為跟隨者(僚機)。跟隨者們以一定的偏置量跟蹤領導者的位置和方向。
(2)一致性(Consensus)法。該方法最初來源于多智能體系統的一致性問題,該問題目的是通過對系統中的每個智能體(無人機)設計分布式控制算法,使所有智能體所有狀態值達到相同的值。在此基礎上對每個智能體設定一定的偏移量,以達到特定的飛行隊形。
(3)基于行為的控制。該方法的基礎是將主要控制目標分解為任務或者行為。該方法還可以處理諸如碰撞避免,中心聚攏,障礙回避等復雜群體行為運動。
4
展望
隨著人工智能以及各種智能控制算法的不斷發展,基于多智能體系統理論的無人機蜂群作戰技術在充分發揮數量優勢的情況下,可以完成偵察,滲透以及打擊等一系列戰術任務,并在此基礎上構建起新型空中作戰力量,有針對地提高作戰能力。作為一項前沿的空中作戰技術,無人蜂群作戰技術的研究在未來將面向重點解決發展協同算法,提升無人機編隊的自主協作能力;開發軟件開放架構和支持框架;系統制造,集成與演示等基礎問題。
-
無人機
+關注
關注
229文章
10420瀏覽量
180129 -
MAS
+關注
關注
0文章
16瀏覽量
10680 -
ISR
+關注
關注
0文章
38瀏覽量
14426
原文標題:多智能體系統理論與無人機蜂群作戰技術的“前世今生”
文章出處:【微信號:xuyongshuo-work,微信公眾號:許永碩】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
各類反無人機技術的優勢
反無人機技術的研發,無人機反制設備成為熱門產品
無人機集群作戰技術的介紹
無人機“蜂群”有多厲害,無人機技術又得到進一步提升
中國無人機“蜂群”系統試飛亮相,哪個國家能防住呢
淺談“超級蜂群”無人機作戰項目開發的技術核心
淺談反無人機蜂群手段分類及特點

淺談無人機蜂群作戰指控系統發展現狀

解密無人機“蜂群”和“狼群戰術”是什么
美軍小型無人機蜂群戰術運用
無人機蜂群作戰概念及國內外發展現狀






 工商網監
工商網監
評論