 看門狗多任務系統及喂狗方法詳解
看門狗多任務系統及喂狗方法詳解
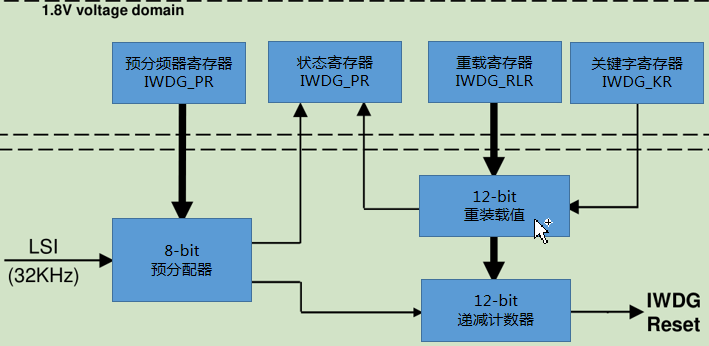
看門狗分硬件看門狗和 軟件看門狗。硬件看門狗是利用一個定時器電路,其定時輸出連接到電路的復位端,程序在一定時間范圍內對定時器清零(俗稱“喂狗”),因此程序正常工作時, 定時器總不能溢出,也就不能產生復位信號。如果程序出現故障,不在定時周期內復位看門狗,就使得看門狗定時器溢出產生復位信號并重啟系統。軟件看門狗原理 上一樣,只是將硬件電路上的定時器用處理器的內部定時器代替,這樣可以簡化硬件電路設計,但在可靠性方面不如硬件定時器,比如系統內部定時器自身發生故障 就無法檢測到。當然也有通過雙定時器相互監視,這不僅加大系統開銷,也不能解決全部問題,比如中斷系統故障導致定時器中斷失效。
看門狗本身不是用來解決系統出現的問題,在調試過程中發現的故障應該要查改設計本身的錯誤。加入看門狗目的是對一些程序潛在錯誤和惡劣環 境干擾等因素導致系統死機而在無人干預情況下自動恢復系統正常工作狀態。看門狗也不能完全避免故障造成的損失,畢竟從發現故障到系統復位恢復正常這段時間 內怠工。同時一些系統也需要復位前保護現場數據,重啟后恢復現場數據,這可能也需要一筆軟硬件的開銷。

圖1:(a) 多任務系統看門狗示意圖;(b) 相應的看門狗復位邏輯圖
在單任務系統中看門狗工作原理如上所述,容易實現。在多任務系統中情況稍為復雜。假如每個任務都像單任務系統那么做,如圖1(a)所示,只要有一個 任務正常工作并定期“喂狗”,看門狗定時器就不會溢出。除非所有的任務都故障,才能使得看門狗定時器溢出而復位,如圖1(b)。
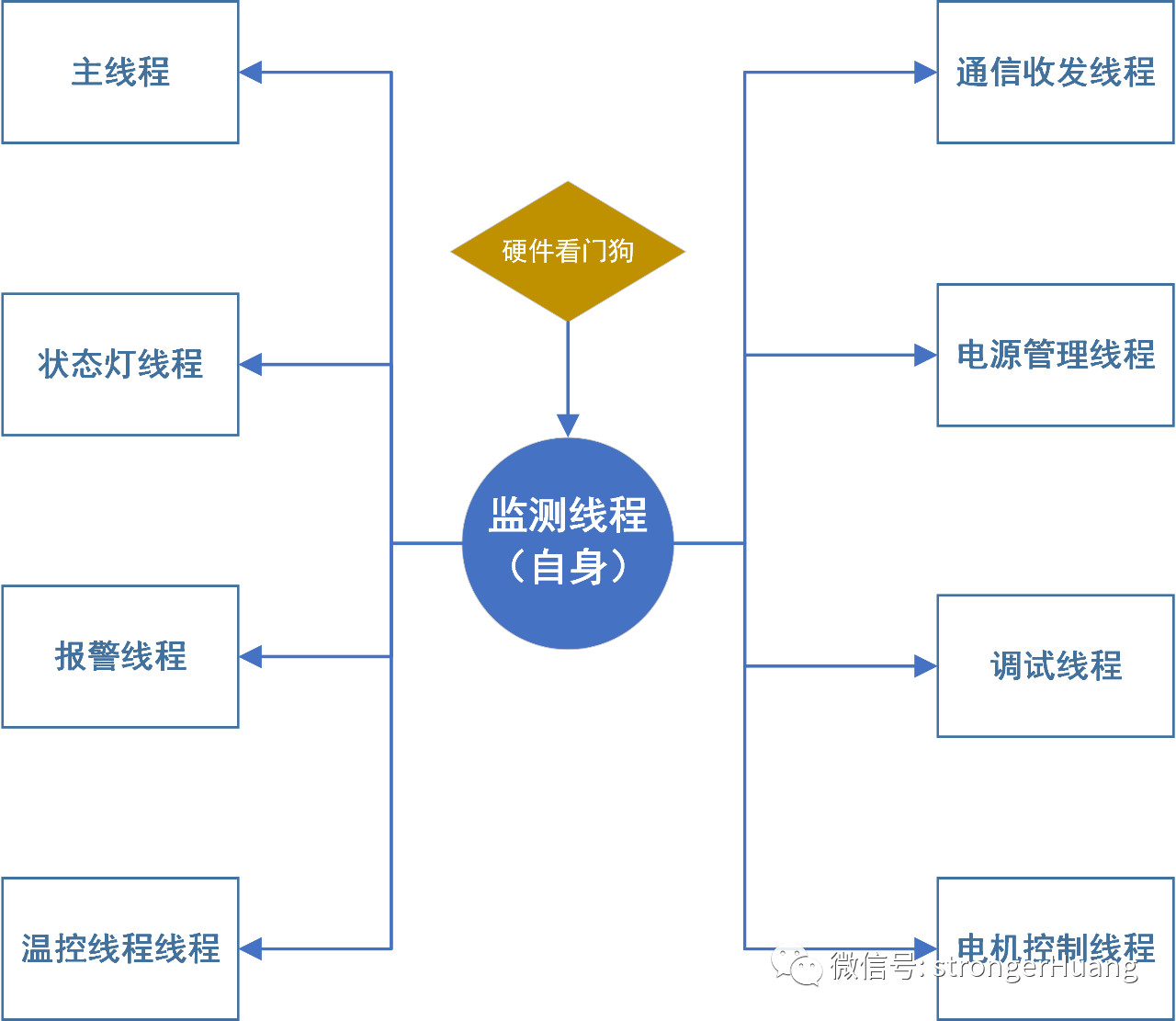
而往往我們需要的是只要有一個任務故障,系統就要求復位。或者選擇幾個關鍵的任務接受監視,只要一個任務出問題系統就要求復位,如圖2(a)所示,相應的看門狗復位邏輯如圖2(b)所示。
在多任務系統中通過創建一個監視任務TaskMonitor,它的優先級高于被監視的任務群Task1、Task2...Taskn。 TaskMonitor在Task1~Taskn正常工作情況下,一定時間內對硬件看門狗定時器清零。如果被監視任務群有一個Task_x出現故 障,TaskMonitor就不對看門狗定時器清零,也就達到被監視任務出現故障時系統自動重啟的目的。另外任務TaskMonitor自身出故障時,也 不能及時對看門狗定時器清零,看門狗也能自動復位重啟。接下來需要解決一個問題是:監視任務如何有效監視被監視的任務群。

圖2:(a) 多任務系統看門狗示意圖;(b) 正確的看門狗復位邏輯圖
在TaskMonitor中定義一組結構體來模擬看門狗定時器組,
typedef struct
{
UINT32 CurCnt, LastCnt;
BOOL RunState;
int taskID;
} STRUCT_WATCH_DOG;
該結構體包括被監視的任務號taskID,用來模擬“喂狗”的變量CurCnt、LastCnt(具體含義見下文),看門狗狀態標志RunState用來控制當前任務是否接受監視。
被監視的任務Task1~Taskn調用自定義函數CreateWatchDog(int taskid)來創建看門狗,被監視任務一段時間內要求“喂狗”,調用ResetWatchDog(int taskid),這個“喂狗”動作實質就是對看門狗定時器結構體中的變量CurCnt加1操作。TaskMonitor大部分時間處于延時狀態,假設硬件 看門狗定時是2秒,監視任務可以延時1.5秒,接著對創建的看門狗定時器組一一檢驗,延時前保存CurCnt的當前值到LastCnt,延時后比較 CurCnt與LastCnt是否相等,都不相等系統才是正常的。需要注意的是CurCnt和LastCnt數據字節數太小,而“喂狗”過于頻繁,可能出 現CurCnt加1操作達到一個循環而與LastCnt相等。
如果有任意一組的CurCnt等于LastCnt,認為對應接受監視的任務沒有“喂狗”動作,也就檢測到該任務出現故障需要重啟,這時候 TaskMonitor不對硬件看門狗定時器清零,或者延時很長的時間,比如10秒,足以使得系統重啟。反之,系統正常,Task1~Taskn定期對 TaskMonitor“喂狗”,TaskMonitor又定期對硬件看門狗“喂狗”,系統就得不到復位。還有一點,被監視任務可以通過調用 PauseWatchDog(int taskid)來取消對應的看門狗,實際上就是對STRUCT_WATCH_DOG結構體中的RunState操作,該標志體現看門狗有效與否。
這種方式可監視的最大任務數由STRUCT_WATCH_DOG結構數據的個數決定。程序中應該有一個變量記錄當前已創建的看門狗數,判斷被監視任務Task1~Taskn是否“喂狗”只需比較CurCnt與LastCnt的值n次。
圖3:系統復位邏輯圖。
硬件看門狗監視TaskMonitor任務,TaskMonitor任務又監視其他的被監視任務Task1~Taskn,形成這樣一種鏈條。這種方 式系統的故障圖表示如圖3所示。被監視任務Task1~Taskn及TaskMonitor都是或的關系,因此被監視的任一任務發生故障,硬件電路看門狗 就能復位。
為實現多任務系統的看門狗監視功能額外增加了TaskMonitor任務,這個任務占用執行時間多少也是一個重要問題。假設 TaskMonitor任務一個監視周期延時1.5秒,此外需要執行保存當前計數值,判斷是否“喂狗”等語句,它的CPU占用時間是很小的。用一個具體的 試驗證實,使用50M工作頻率的CPU(S3C4510),移植vxWorks操作系統,cache不使能條件下監視10個任務,每個監視周期占用 220~240微秒。可見該任務絕大多數時間都處于任務延時狀態。
被監視任務可能有獲取消息、等待一個信號量等的語句,往往這個消息、信號量的等待是無限期的等待。這就需要將這類語句作一些修改。比如在vxWorks中將一次無期限的獲取信號量操作
semTake(semID, WAIT_FOREVER); // WAIT_FOREVER為無限時間等待
分解為
do
{
ResetWatchDog; // “喂狗”操作
}while(semTake(semID, sysClkRateGet( )) != OK); // 1s內的等待信號量操作
多次的時間范圍內的獲取信號量操作,這樣才能保證及時“喂狗”。
另外需要注意的是系統中是否有的任務優先級比TaskMonitor高并且長時間處于執行狀態,TaskMonitor長時間得不到調度,使得看門狗錯誤復位。良好的任務劃分,配置是不應該出現這種高優先級任務長期執行狀況的。
-
看門狗
+關注
關注
10文章
560瀏覽量
70790 -
定時器
+關注
關注
23文章
3246瀏覽量
114725
原文標題:詳解多任務看門狗及喂狗方法
文章出處:【微信號:wujianying_danpianji,微信公眾號:單片機精講吳鑒鷹】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
在多任務(RTOS)環境中使用看門狗
看門狗喂狗時間及程序
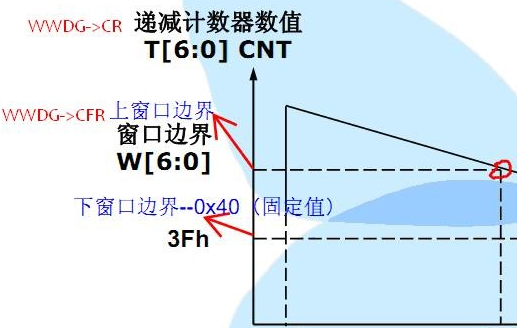
什么是stm32看門狗?獨立看門狗和窗口看門狗工作原理解析
基于STM32、FreeRTOS 實現硬件看門狗+軟件看門狗監測多任務的方法
對于MCU看門狗IIWDG WWDG喂狗時間的配置參考

FreeRTOS使用看門狗的步驟
STM32中的獨立看門狗和窗口看門狗
MCU如何集成看門狗的功能






 工商網監
工商網監
評論