 《高度靈活的L4計算平臺》的主題演講
《高度靈活的L4計算平臺》的主題演講
2018年6月21-22日,由布谷鳥科技、佐智汽車主辦,艾拉比智能、ADI亞德諾半導體、索喜科技贊助支持的“2018第二屆智能座艙與智能駕駛峰會”在深圳福田區綠景錦江酒店舉辦。深圳布谷鳥科技有限公司的副總裁戴智翔在會上做了《高度靈活的L4計算平臺》的主題演講。
布谷鳥科技 戴智翔
主持人:感謝大家參加布谷鳥2018第二屆智能座艙與智能駕駛峰會。今天是智能駕駛專場,上午有8位演講嘉賓給我們帶來精彩的演講。第一位是來自深圳布谷鳥科技有限公司的副總裁戴智翔戴總。他是布谷鳥智能駕駛事業部的總經理、高級工程師,深圳市科技創新獎獲得者,曾獲得十多項國家發明專利,擁有北京大學MBA學位,在管理和技術上都有很豐富的經驗。
戴智翔:大家上午好!今天分享的主題是“高度靈活的L4計算平臺”。布谷鳥始終聚焦在汽車計算平臺的研發和量產上,今天的演講重點智能駕駛計算平臺。
布谷鳥智能駕駛產品有兩種:一是L2計算平臺,到2018年12月份就能達到SOP的水平;二是L4計算平臺在快速演進,架構還有樣機基本成型。我們為什么說L2和L4,沒提及L3?L3屬于中間狀態,在今天的報告中將和大家一起分享我們對L3的思考。
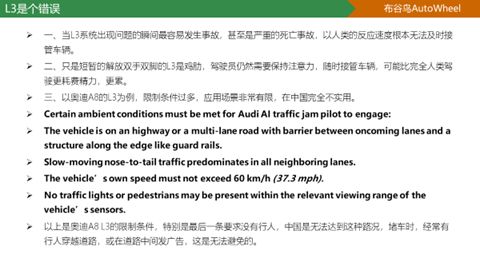
SAE對智能駕駛的分級,重點關注L3和L4,它們最大的區別是在整個系統失效的情況下,誰接手自動駕駛?比如在高速上,自動駕駛失控,怎么辦?L3的責任是駕駛員,到L4就意味著需要系統來接管。這意味著備份很重要,L3在有異常情況發生的時候,人接手比較困難,危險常常就是一瞬間的事情。這是今年上半年Uber自動駕駛的視頻,我們可以看到當時的情況。
UBER事故,從外部和內部兩個視角看,外部出現事故時間非常短,基本上就是四五秒的時間。Uber有專門的測試員在駕駛座位上,系安全帶,但事故發生是瞬間的事。人類從事故發生,到反應過來,并剎住車可能需要十幾秒,這種情況下駕駛員無法阻止事故的發生。所以L3面對緊急事故時,人類無法在短時間里接手自動駕駛系統。實際上對人來說,L3比L2更累,大家清楚L2只是輔助駕駛,在個別維度輔助人,到了L3級別,對人類雙手、雙腳解放的程度很高,然而對人的注意力解放程度并沒有減弱。
2017年8月份,在美國的CES上,奧迪發布了A8,號稱第一款L3量產的車型。A8的L3智能駕駛的條件限制非常多,實現其功能基本上不可能,比如說要求路邊的實線清晰度高,清晰的護欄,同時左右車道分開,甚至要求在行駛的路上沒有行人,在中國基本不存在這樣的環境。所以新奧迪A8沒有在中國推廣。
L2更多的聚焦功能,L3更多聚焦到場景。現在不少的廠商就智能駕駛究竟從哪個級別開始商業化都在探討。我們認為封閉路段應該是最可能的,然后逐步實現城市路段、無標識的農村路段等。先實現四五個標準場景,前期在標準場景和封閉園區做自動駕駛L4的切入。

AutoWheel是布谷鳥智能駕駛的商標。我們更多的按照行業大勢往前走,計算平臺硬件、軟件以ISO26262功能安全為核心設計原則,算法和軟件后期可迭代開發。整個公司以量產為核心目標,前期階段幫客戶搭樣車。
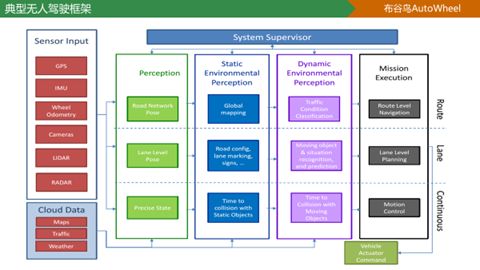
下面是無人駕駛的典型框架,左邊是傳感器的部分,包括GPS、雷達等,下面是遠程的車聯網部分,右邊有感知,包括動態和靜態感知,以及決策執行。我們的硬件計算平臺涵蓋這四部分。我們認為,只有功能強大的基礎硬件,未來的軟件升級和功能迭代才能在硬件平臺上快速演進。
算法效率依托的是CPU或者基礎計算平臺,當前的集成電路設計都是IP和搭積木的方式,從描述行為基本上分為三類:軟核、固核和硬核。軟核靈活性高,但是它的總體效率比較差。同時IP軟核以原代碼提供,知識產權不受保護。
硬核的好處是響應速度非常快,但是靈活性欠缺,像我們專用的芯片一樣,有它專門的方向。硬核的設計周期比較長,這個行業又在快速前進,行業當前很多采用異構的計算架構。
大家議論比較多的CPU、GPU、FPGA等,到底我們采用哪種架構?以英偉達為代表的GPU廠商,它的浮點運算比較強,前端部分用GPU比較多。FPGA的好處是非常靈活、高效率,決策和傳感器融合用得較多,現在很多廠商都會用FPGA芯片。CPU是應用比較廣泛的。
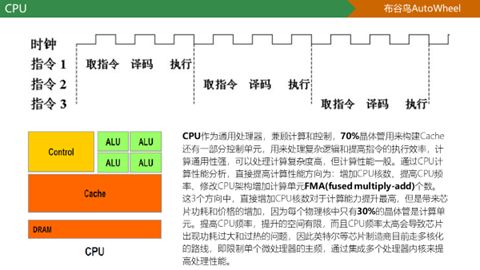
通用的CPU架構有70%的晶體管做存儲,相對來說它的運算單元比較少,另外一塊ALU是它的運算單元,相對來說占比有限。英特爾芯片制造廠商都是走多核路線。運算能力有限的情況下,要提高運算能力只能走多核,通過集成多個處理器內核提升處理性能。
CISC和RISC是兩種微處理的架構,CISC結構的計算機數據線和指令線分時復用,RISC更多的采用數據和指令分離的方式。現在ARM架構更多采用RISC的方式,RISC的設計技術更適用于專用機,像家居、汽車里面ARM架構。
CISC計算機的指令系統豐富,有專用指令來完成特定的功能。更多適用于通用機,像家用的X86架構。現在X86體系表面接受CISC指令,實際上通過譯碼器轉化為RISC,它的底層運行的都是RISC指令。ARM是當前做智能駕駛嵌入系統的主流,軟核在運行ADAS系統時速度很慢。
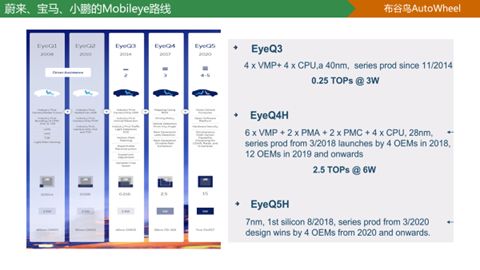
MobileyeEyeQ4,用了4個MIPS,大CPU做主控和算法調度,以及一個MIPS,小CPU做外向控制,集成了10個向量處理器。整個居于飽和的設計,將系統集成在芯片里,當前國內大多數企業也是采用這種方式。效率不會特別高。
GPU是邏輯控制單元對應多個計算單元,同CPU一樣也是執行指令、指令譯碼、在指令執行的過程中,計算單元才會發揮作用。相對來說它的邏輯控制單元比CPU簡單,所以它整個算法本身的串行處理會導致GPU的浮點計算能力顯著降低。
FPGA不采用指令和軟件,是一個軟硬集合的器件。靈活性強。FPGA通過硬件性的描述語言來實現邏輯電路的自編程,由于算法是定制的,相比CPU和GPU會省很多過程,使用周期執行比較快,整個計算效率高于CPU和GPU。
現在FPGA也有一個問題,它主要是做整數的運算,現在傳感器、圖像、視頻更多以小數為主,這時候通常要用DSP的硬核來執行該運算,導致FPGA的成本非常高,而且現在的FPGA更多的融入了DSP、CPU。

L4級別自動駕駛的計算架構
下面是典型L4的計算架構,已經有不少的廠商采用該架構,它的核心采用英特爾的一個處理器加一個加速卡,同時做了上下部分的備份,中間通過以太網交換實現架構的提升。
以太網交換扮演兩個作用:一是備份,當一套系統有異常,另外一套系統正常工作。當需要提高運算能力時,這兩部分可以串行加在一起,提升運算能力,性能達到行業相當高的水平。
該架構的處理和決策系統的算法,感知系統完善、成熟,特點是成本非常高,以10萬美金為等級的金額來推進,一般的廠商很難量產化。
英特爾采用典型L4的架構,Waymo,無論是視覺還是雷達,全部接入計算平臺。對穩定性、可靠性做了不少的驗證,有財力的企業采用英特爾至強的架構較多。百度一部分使用至強處理器加一個硬件加速卡,有時候也會用兩塊,根據不同的場景要求。
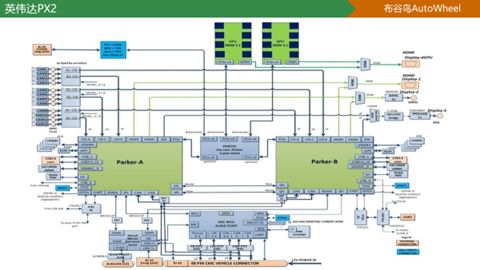
英偉達的PX2,從GPU到Parker-A,Parker-B,都是對稱式設計。無論是采用至強還是英特爾,以太網交換這塊,兩個經典的架構都使用了相同設計。英偉達的整個方向,以GPU為核心,對點云的數據處理和決策關注比較少,通用的計算性能比較差。整個架構僅僅用了ASIL-D級MCU提升功能安全,而整體的功能安全水平沒有提升。我們認為它更多的是偏初期的,離通常的量產還有一段路要走。
去年博世曾講,博世聚焦在L1-L3,L4沒有更多的消息發布出來。因為L2及以下更多是零配件業務,到L4以上更多是運營業務,對博世這類廠商來說是不是超出他的業務范疇,我們不得而知。
蔚來、寶馬、小鵬都是采用Mobileye的路線,和博世走的路線不同。他們比較激進,更多關注GPU,我們看到傳統的博世更關注計算和安全,本質上有區別的。Mobileye更多關注軟件,對硬件和功能安全關注很少。它最新的EyeQ5方案,前面使用一顆EyeQ5芯片做視覺,后面做決策和執行,后面再用英特爾的產品,整個強調的都是計算,通過GPU+CPU實現整個架構,在安全方面沒有做更多的考慮。
去年開始我們對瑞薩系列進行研發,它全球只有4塊板,我們拿到其中一塊,官方構建的設計用4塊RCar H3,用以太網關交換來實現中間兩塊的交換。它是用HAD的處理芯片來做控制部分,這樣的架構我們認為接近能夠量產的,在功能安全和性能上,在行業里比較領先。RCar H3價格還沒有出來,但是成本相對高昂,安全和圖形處理,我們認為它達到了比較好的水平。
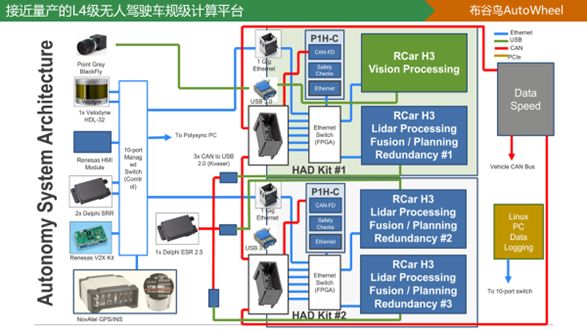
基于這種架構,所有的芯片都是ASIL-B以上的芯片,至少總體上達到了ASIL-B的水平。雖然軟件會影響整體系統的穩定性,但是硬件架構具備這樣的條件,在此基礎上,向上通過軟件不斷完善,可以做好功能安全和視覺的靈活運算要求。
布谷鳥的Auto Wheel系統
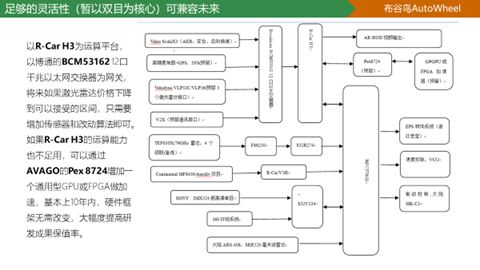
基于RCar H3的布谷鳥Auto Wheel,以一套獨立的L2系統替代了三套H3的系統,降低系統的成本和復雜度,提升可靠性。我們在前面用了一個博通BCM5316212口千兆以太網交換器為網關,高精度地圖等都通過它接入,控制汽車行駛的是MPC5746,也支持AUTOSAR架構。
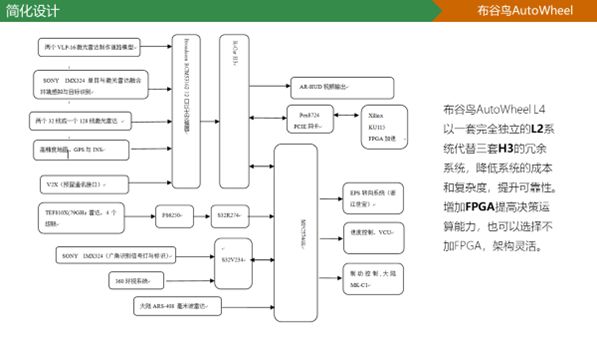
在這種架構里,視覺部分容易升級,在下面是MPC,里面跑AUTOSAR,對汽車安全控制不用過多擔心,上面的視覺系統一旦出現異常,傳感器也會進入到MPC里面來。哪怕在高速上出了故障也可以停到路邊來, 這是L4和L3的最大區別。在系統失效的時候,不用人接手,至少能停到緊急停車帶,顯著降低事故的發生。
另外一個版本的思考,基于原有的架構,增加了雙目攝像頭,接入RCar H3,整個架構與前版本沒有變化,加入雙目后,對整個視覺系統有較大的提升。同時以博通BCM53162以太交換器為核心,隨著時間推移, RCar H3運算能力不夠強,我們通過AVAGO Pex 8724芯片接入GPU或者FPGA來做加速,這個硬件架構未來10年左右我們認為是符合未來需求的。
對于計算平臺廠商來說,我們既得考慮現在,也要考慮未來的兼容性,系統不斷升級,需要基本硬件的支撐。L4計算平臺,通過這樣的架構,我們認為實現了整體布局。對車廠來說是比較不錯的架構,特別是對于關注量產的企業。
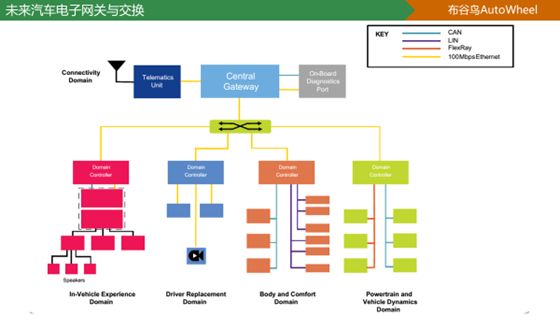
這是NXP汽車以太網骨干,和汽車行業的朋友聊到,說到現在很多廠商開始用以太網。
這張圖清晰的表達了未來汽車電子架構,中間綠色的是以太交換,通過以太交換接入域控制器。布谷鳥關注兩塊,一是智能駕駛域,一是智能座艙域,中間通過以太網傳輸,它的速度會顯著提升。
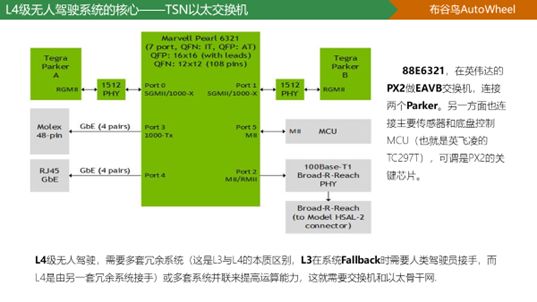
這是L4無人駕駛系統核心部件,TSN以太交換機,用英偉達PX2做EAVB交換機,連接兩個Parker。我們沒有過多的考慮L3,因為L4以下,對車廠來說,通過零部件減配,借L4的平臺可以達到L3的水平,同時保留向上升級到 L4的能力。
以上就是我今天的演講。感謝大家!
-
智能駕駛
+關注
關注
3文章
2535瀏覽量
48800 -
計算平臺
+關注
關注
0文章
52瀏覽量
9672 -
自動駕駛
+關注
關注
784文章
13845瀏覽量
166574
原文標題:布谷鳥戴智翔:高度靈活的L4計算平臺
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

l4級別自動駕駛的特點是什么
經緯恒潤全冗余R-EPS助力L4級自動駕駛落地

開放原子開源生態大會OpenHarmony生態主題演講報名開啟
L4算法公司如何助力城市NOA加速落地?
NVIDIA CEO黃仁勛在 SIGGRAPH 2024 主題演講中或將首次亮相消費級GPU Blackwell

L0與L4雙機采用SPI DMA循環模式通信過程中,L4接收數據錯位了的原因?
華為Net Master+高清網絡數字地圖,加速邁向L4自智網絡
2025量產L4 RoboTaxi,滴滴自動駕駛再進一步

ANT7-T-ST25DV04K中能否通過NFC進行供電而且供主控低功耗芯片L4正常工作?
NVIDIA和昊鉑宣布雙方將合作量產L4級自動駕駛汽車






 工商網監
工商網監
評論