7月6日消息,據(jù)國外媒體報道,麻省理工學(xué)院最新發(fā)布的新研究視頻顯示,該學(xué)院研制的Cheetah 3獵豹機器人不需要直視而爬上樓梯臺階。視頻顯示,這個90磅重的機器人配備了新的算法,即使沒有攝像頭的幫助也可以躲避障礙物,機器人通過觸感來適應(yīng)整個環(huán)境并完成任務(wù)。
我們之前也看過不少機器人爬樓梯,但往往會使用攝像機取景進行分析,從而完成這一切。Cheetah 3獵豹機器人的團隊希望它能夠在沒有看到前方路徑的情況下進行運動,過分依賴攝像頭可能會減緩反應(yīng),或使其蹣跚而行。“如果它踩到相機看不到的東西怎么辦?它會做什么?”麻省理工學(xué)院機械工程教授Sangbae Kim在新聞發(fā)布會上說道,“這就是盲視運動可以起作用的地方。我們不愿意太過依靠機器人的視覺。”
麻省理工學(xué)院在新聞發(fā)布會是哪個說,該計劃是讓機器人能夠前往人類無法冒險的地方——比如說進入內(nèi)部發(fā)電廠深入檢查。“通過遙控機器人可以更加安全地完成危險,骯臟和困難的工作,”Kim說。但在這種惡劣環(huán)境中,機器人可能無法用攝像頭進行觀察。比如一個機器人進入被毀壞的日本福島第一核電站內(nèi)部搜索殘留的核燃料時,所攜帶的相機就被輻射所摧毀。
這就是為什么團隊使用算法和傳感器來給予機器人本體感受——感知自己的軀體在環(huán)境中的位置。機器人的升級包括改善其硬件性能,讓它能夠伸展和扭曲。其中還引入了新的預(yù)測算法,幫助Cheetah 3獵豹機器人改變其步態(tài),防止絆倒或摔倒。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
原文標(biāo)題:MIT機器人達成新成就:不依靠視覺也能爬樓梯
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
相關(guān)推薦
。它能夠識別道路標(biāo)志、檢測障礙物、監(jiān)控駕駛員狀態(tài),甚至與其他車輛和交通設(shè)施進行通信。 下面分享一個關(guān)于車載攝像頭的EMC問題案例。 ? 二實際案例 下圖為某款車載攝像頭通過車載國標(biāo)三輻射測試的數(shù)據(jù),我們
![的頭像]() 發(fā)表于
發(fā)表于 12-18 11:11
?502次閱讀
如今,車載攝像頭已經(jīng)不再僅僅是一個輔助設(shè)備,而是逐漸成為了智能駕駛系統(tǒng)中不可或缺的一部分。360度全景監(jiān)控、行車記錄儀以及自動駕駛輔助功能,車載攝像頭的應(yīng)用范圍不斷拓展,技術(shù)也在不斷創(chuàng)新。它能夠識別道路標(biāo)志、檢測
![的頭像]() 發(fā)表于
發(fā)表于 12-18 11:07
?614次閱讀
富唯智能移動機器人通過激光雷達導(dǎo)航算法,實現(xiàn)自動路徑規(guī)劃,無需軌道、磁條等。當(dāng)路徑中有障礙物時,會重新規(guī)劃路徑避開障礙物。
![的頭像]() 發(fā)表于
發(fā)表于 11-16 15:54
?222次閱讀

算法,尤其是精準(zhǔn)定位和障礙物識別,精準(zhǔn)的定位可優(yōu)化割草路線,避免重復(fù)割草和覆蓋不完全的情況;對靜態(tài)和動態(tài)障礙物的識別可實現(xiàn)有效避障,提升割草效率和保障產(chǎn)品安全。啟
![的頭像]() 發(fā)表于
發(fā)表于 09-13 08:00
?474次閱讀

電子發(fā)燒友網(wǎng)站提供《割草機器人利用超聲波感應(yīng)自動檢測地形類型和障礙物.pdf》資料免費下載
發(fā)表于 09-07 09:17
?0次下載

自動駕駛汽車識別障礙物是一個復(fù)雜而關(guān)鍵的過程,它依賴于多種傳感器和技術(shù)的協(xié)同工作。這些傳感器主要包括激光雷達(LiDAR)、雷達、攝像頭以及超聲波雷達等,它們各自具有不同的工作原理和優(yōu)勢,共同為自動駕駛汽車提供全面的環(huán)境感知能力。以下是對自動駕駛汽車如何識別
![的頭像]() 發(fā)表于
發(fā)表于 07-23 16:40
?1252次閱讀
求助!!!
之前攝像頭模塊用的好好的,由于要去外省打比賽,攝像頭模塊連同機器人一起封箱后從北京運到了上海,結(jié)果到了上海一上電發(fā)現(xiàn)攝像頭模塊啥也
發(fā)表于 07-15 23:50
機器人視覺是一種利用計算機視覺技術(shù)實現(xiàn)機器人對環(huán)境的感知和理解的技術(shù)。它涉及到圖像采集、圖像處理、特征提取、目標(biāo)識別、場景理解等多個環(huán)節(jié)。 機器人視覺系統(tǒng)主要由以下幾個部分組成: 1.1 攝像
![的頭像]() 發(fā)表于
發(fā)表于 07-04 11:27
?1132次閱讀
機器人視覺是機器人技術(shù)中的一個重要分支,它涉及到圖像處理、計算機視覺、機器學(xué)習(xí)等多個領(lǐng)域。機器人視覺可以分為三個主要部分:圖像采集、圖像處理
![的頭像]() 發(fā)表于
發(fā)表于 07-04 11:17
?643次閱讀
機器人視覺伺服中有著廣闊的應(yīng)用,本實驗將集成攝像頭的 伊瑟特主站應(yīng)用在自主研發(fā)的六自由度串聯(lián)機器人上,將機器人運動學(xué)算法編寫入 伊瑟特主站,
發(fā)表于 05-29 16:17
地毯并增加吸力,或是繞過障礙物進行清掃。同時,通過手機APP遠程控制、語音指令等方式,用戶可以方便地操作掃地機器人,實現(xiàn)個性化的清潔需求。
3.掃地機器人面臨的技術(shù)壁壘與客戶體驗問題
發(fā)表于 05-05 15:03
1.概念理解:智能攝像頭抄表器智能攝像頭抄表器是一種融合了人工智能和物聯(lián)網(wǎng)技術(shù)的創(chuàng)新設(shè)備,主要用于自動讀取和記錄各種計量儀表的數(shù)據(jù),如水表、電表、燃氣表等。它通過高清攝像頭捕捉圖像,然
![的頭像]() 發(fā)表于
發(fā)表于 04-24 14:14
?638次閱讀

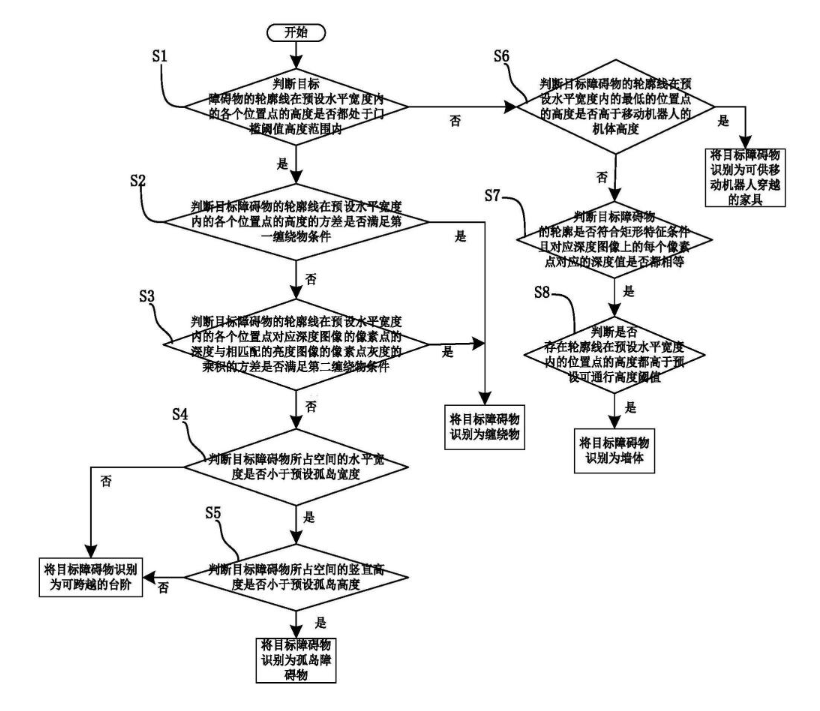
此項技術(shù)創(chuàng)新性在于,通過利用安裝在移動機器人前方的TOF攝像頭,可以獲取探測視角范圍內(nèi)的目標(biāo)障礙物的深度圖像,并據(jù)此計算出目標(biāo)障礙物的深度信
![的頭像]() 發(fā)表于
發(fā)表于 04-12 10:19
?391次閱讀
小型移動搬運機器人是一種能夠自主移動并搬運物品的機器人。它通常配備有輪子或履帶,可以在不同的地面上移動,如硬地面、地毯等。這種機器人
![的頭像]() 發(fā)表于
發(fā)表于 03-06 13:37
?423次閱讀
機器人通常都會配備攝像頭,設(shè)計數(shù)字孿生仿真時,在模擬環(huán)境中準(zhǔn)確復(fù)制其性能十分重要。
![的頭像]() 發(fā)表于
發(fā)表于 02-20 16:20
?901次閱讀

") 獵豹機器人配備新的算法_沒有攝像頭也可以躲避障礙物?
獵豹機器人配備新的算法_沒有攝像頭也可以躲避障礙物?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論