") 如何才能高效地進行深度學(xué)習(xí)模型訓(xùn)練?
如何才能高效地進行深度學(xué)習(xí)模型訓(xùn)練?
近年來,深度學(xué)習(xí)在NLP、圖像識別、語音識別、機器翻譯等方面都取得了驚人的成果。但是,深度學(xué)習(xí)的應(yīng)用范圍卻日益受到數(shù)據(jù)量和模型規(guī)模的限制。如何才能高效地進行深度學(xué)習(xí)模型訓(xùn)練?微軟亞洲研究院機器學(xué)習(xí)組主管研究員陳薇和她的團隊基于對機器學(xué)習(xí)的完整理解,將分布式技術(shù)和深度學(xué)習(xí)緊密結(jié)合在一起,探索全新的真正合二為一“分布式深度學(xué)習(xí)”算法。
隨著大數(shù)據(jù)和高效計算資源的出現(xiàn),深度學(xué)習(xí)在人工智能的很多領(lǐng)域中都取得了重大突破。然而,面對越來越復(fù)雜的任務(wù),數(shù)據(jù)和深度學(xué)習(xí)模型的規(guī)模都變得日益龐大。例如,用來訓(xùn)練圖像分類器的有標(biāo)簽的圖像數(shù)據(jù)量達數(shù)百萬、甚至上千萬張。大規(guī)模訓(xùn)練數(shù)據(jù)的出現(xiàn)為訓(xùn)練大模型提供了物質(zhì)基礎(chǔ),因此近年來涌現(xiàn)出了很多大規(guī)模的機器學(xué)習(xí)模型,例如2015年微軟亞洲研究院開發(fā)出的擁有超過兩百億個參數(shù)的LightLDA主題模型。然而,當(dāng)訓(xùn)練數(shù)據(jù)詞表增大到成百上千萬時,如果不做任何剪枝處理,深度學(xué)習(xí)模型可能會擁有上百億、甚至是幾千億個參數(shù)。
為了提高深度學(xué)習(xí)模型的訓(xùn)練效率,減少訓(xùn)練時間,我們普遍會采用分布式技術(shù)來執(zhí)行訓(xùn)練任務(wù)——同時利用多個工作節(jié)點,分布式地、高效地訓(xùn)練出性能優(yōu)良的神經(jīng)網(wǎng)絡(luò)模型。分布式技術(shù)是深度學(xué)習(xí)技術(shù)的加速器,能夠顯著提高深度學(xué)習(xí)的訓(xùn)練效率、進一步增大其應(yīng)用范圍。
深度學(xué)習(xí)的目標(biāo)是從數(shù)據(jù)中挖掘出規(guī)律,幫助我們進行預(yù)測。深度學(xué)習(xí)算法的一般框架是,利用優(yōu)化算法迭代地最小化訓(xùn)練數(shù)據(jù)上的經(jīng)驗風(fēng)險。由于數(shù)據(jù)的統(tǒng)計性質(zhì)、優(yōu)化的收斂性質(zhì)、以及學(xué)習(xí)的泛化性質(zhì)在多機執(zhí)行時的靈活度更高,相比于其它的計算任務(wù),深度學(xué)習(xí)算法在并行化執(zhí)行過程中實際上并不需要計算節(jié)點通過通信嚴(yán)格地執(zhí)行單機版本算法。因而,當(dāng)“分布式”遇到“深度學(xué)習(xí)”,不應(yīng)只局限在對串行算法進行多機實現(xiàn)以及底層實現(xiàn)方面的技術(shù),我們更應(yīng)該基于對機器學(xué)習(xí)的完整理解,將分布式和深度學(xué)習(xí)緊密結(jié)合在一起,結(jié)合深度學(xué)習(xí)的特點,設(shè)計全新的真正合二為一的“分布式深度學(xué)習(xí)”算法。
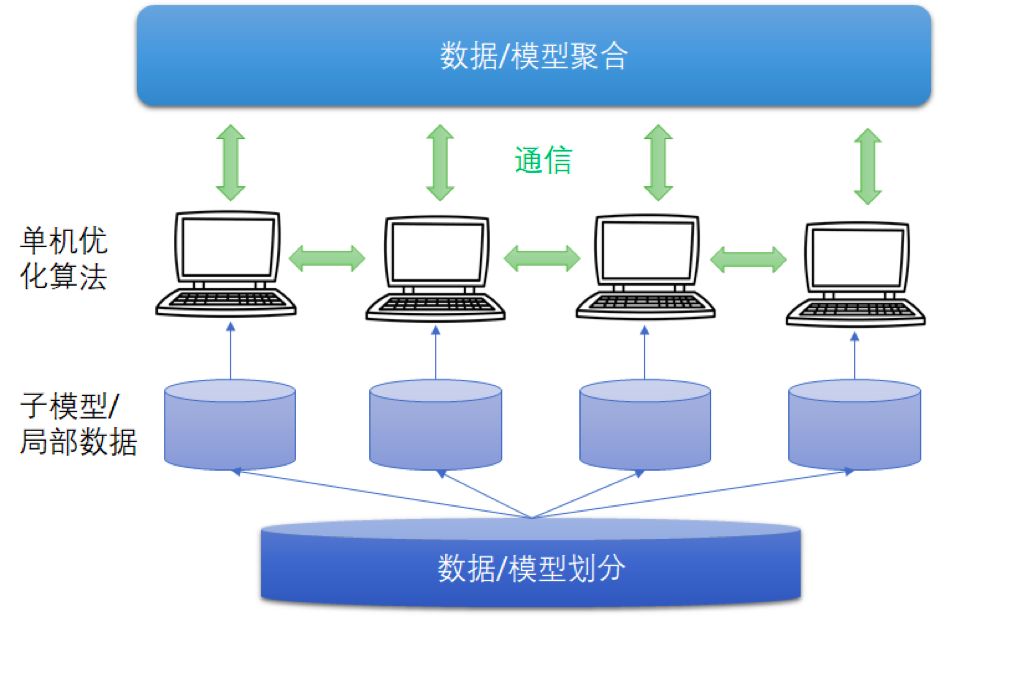
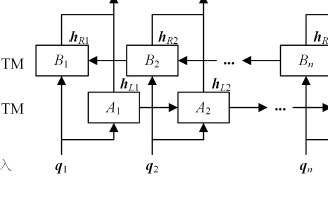
圖1 分布式深度學(xué)習(xí)框架
分布式深度學(xué)習(xí)框架中,包括數(shù)據(jù)/模型切分、本地單機優(yōu)化算法訓(xùn)練、通信機制、和數(shù)據(jù)/模型聚合等模塊。現(xiàn)有的算法一般采用隨機置亂切分的數(shù)據(jù)分配方式,隨機優(yōu)化算法(例如隨機梯度法)的本地訓(xùn)練算法,同步或者異步通信機制,以及參數(shù)平均的模型聚合方式。
結(jié)合深度學(xué)習(xí)算法的特點,微軟亞洲研究院機器學(xué)習(xí)組重新設(shè)計/理解了這些模塊,我們在分布式深度學(xué)習(xí)領(lǐng)域主要做了三個方面的工作:第一個工作,針對異步機制中的梯度延遲問題,我們?yōu)樯疃葘W(xué)習(xí)設(shè)計了“帶有延遲補償?shù)漠惒剿惴ā保坏诙€工作,注意到神經(jīng)網(wǎng)絡(luò)的非凸性質(zhì),我們提出了比參數(shù)平均更加有效的集成聚合方式,并設(shè)計了“集成-壓縮”并行深度學(xué)習(xí)算法;第三個工作,我們首次分析了隨機置亂切分方式下分布式深度學(xué)習(xí)算法的收斂速率,為算法設(shè)計提供了理論指導(dǎo)。
DC-ASGD算法:補償異步通信中梯度的延遲
隨機梯度下降法(SGD)是目前最流行的深度學(xué)習(xí)的優(yōu)化算法之一,更新公式為:

公式 1
其中,wt為當(dāng)前模型,(xt, yt)為隨機抽取的數(shù)據(jù),g(wt; xt, yt)為(xt, yt)所對應(yīng)的經(jīng)驗損失函數(shù)關(guān)于當(dāng)前模型wt的梯度,η為步長/學(xué)習(xí)率。
假設(shè)系統(tǒng)中有多個工作節(jié)點并行地利用隨機梯度法優(yōu)化神經(jīng)網(wǎng)絡(luò)模型,同步和異步是兩種常用的通信同步機制。
同步隨機梯度下降法(Synchronous SGD)在優(yōu)化的每輪迭代中,會等待所有的計算節(jié)點完成梯度計算,然后將每個工作節(jié)點上計算的隨機梯度進行匯總、平均并按照公式1更新模型。之后,工作節(jié)點接收更新之后的模型,并進入下一輪迭代。由于Sync SGD要等待所有的計算節(jié)點完成梯度計算,因此好比木桶效應(yīng),Sync SGD的計算速度會被運算效率最低的工作節(jié)點所拖累。
異步隨機梯度下降法(Asynchronous SGD)在每輪迭代中,每個工作節(jié)點在計算出隨機梯度后直接更新到模型上,不再等待所有的計算節(jié)點完成梯度計算。因此,異步隨機梯度下降法的迭代速度較快,也被廣泛應(yīng)用到深度神經(jīng)網(wǎng)絡(luò)的訓(xùn)練中。然而,Async SGD雖然快,但是用以更新模型的梯度是有延遲的,會對算法的精度帶來影響。什么是“延遲梯度”?我們來看下圖。
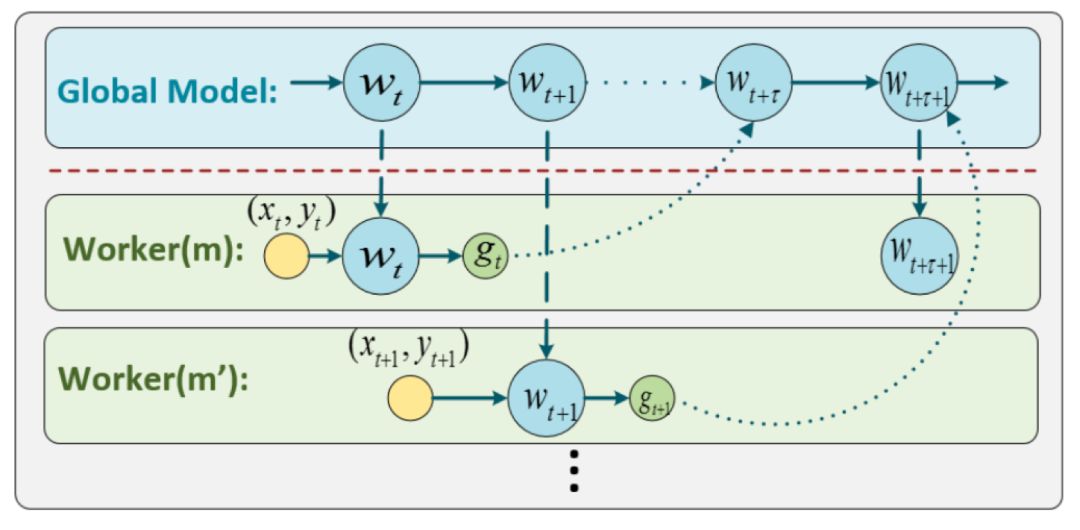
圖2 異步隨機梯度下降法
在Async SGD運行過程中,某個工作節(jié)點Worker(m)在第t次迭代開始時獲取到模型的最新參數(shù)wt和數(shù)據(jù)(xt, yt),計算出相應(yīng)的隨機梯度gt,并將其返回并更新到全局模型w上。由于計算梯度需要一定的時間,當(dāng)這個工作節(jié)點傳回隨機梯度gt時,模型wt已經(jīng)被其他工作節(jié)點更新了τ輪,變?yōu)榱藈t+τ。也就是說,Async SGD的更新公式為:

公式 2
對比公式1,公式2中對模型wt+τ上更新時所使用的隨機梯度是g(wt; xt, yt),相比SGD中應(yīng)該使用的隨機梯度g(wt+τ; xt+τ, yt+τ)產(chǎn)生了τ步的延遲。因而,我們稱Async SGD中隨機梯度為“延遲梯度”。
延遲梯度所帶來的最大問題是,由于每次用以更新模型的梯度并非是正確的梯度(請注意g(wt; xt, yt) ≠ g(wt+τ; xt+τ, yt+τ)),所以導(dǎo)致Async SGD會損傷模型的準(zhǔn)確率,并且這種現(xiàn)象隨著機器數(shù)量的增加會越來越嚴(yán)重。如下圖所示,隨著計算節(jié)點數(shù)目的增加,Async SGD的精度逐漸變差。
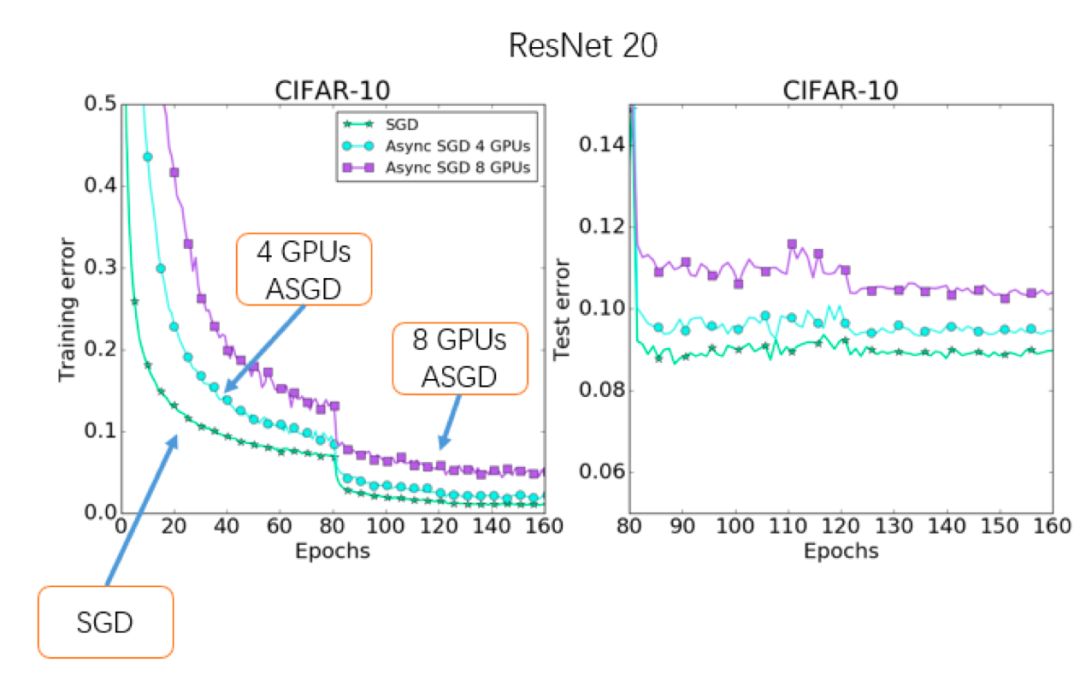
圖3 異步隨機梯度下降法的性能
那么,如何能讓異步隨機梯度下降法在保持訓(xùn)練速度的同時,獲得更高的精度呢?我們設(shè)計了可以補償梯度延遲的DC-ASGD(Delay-compensated Async SGD)算法。
為了研究正確梯度g(wt+τ)和延遲梯度g(wt)之間的關(guān)系,我們將g(wt+τ)在wt處進行泰勒展開:

其中,?g(wt)為梯度的梯度,也就是損失函數(shù)的Hessian矩陣,H(g(wt))為梯度的Hessian矩陣。顯然,延遲梯度實則為真實梯度的零階近似,而其余各項造成了延遲。于是,一個自然的想法是,如果我們將所有的高階項都計算出來,就可以修正延遲梯度為準(zhǔn)確梯度了。然而,由于余項擁有無窮項,所以無法被準(zhǔn)確計算。因此,我們選擇用上述公式中的一階項進行延遲補償:

眾所周知,在現(xiàn)代的深度神經(jīng)網(wǎng)絡(luò)模型中有上百萬甚至更多的參數(shù),計算和存儲Hessian矩陣?g(wt)成為了一件幾乎無法完成的事情。因此,尋找Hessian矩陣的一個良好近似是能否補償梯度延遲的關(guān)鍵。根據(jù)費舍爾信息矩陣的定義,梯度的外積矩陣
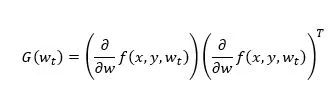
是Hessian矩陣的一個漸近無偏估計,因此我們選擇用G(wt)來近似估計Hessian矩陣。根據(jù)前人的研究,如果在神經(jīng)網(wǎng)絡(luò)模型中用Hessian矩陣的對角元來近似Hessian矩陣,在顯著降低運算和存儲復(fù)雜度的同事還可以保持算法精度,于是我們采用diag(G(wt))作為Hessian矩陣的近似。為了進一步降低近似的方差,我們使用一個(0,1]之間參數(shù)λ來對偏差和方差進行調(diào)節(jié)。綜上,我們設(shè)計了如下帶有延遲補償?shù)漠惒诫S機梯度下降法(DC-ASGD),

其中,對延遲梯度g(wt)的補償項中只包含一階梯度信息,幾乎不增加計算和存儲代價。
我們在CIFAR10數(shù)據(jù)集和ImageNet數(shù)據(jù)集上對DC-ASGD算法進行了評估,實驗結(jié)果見以下兩圖。
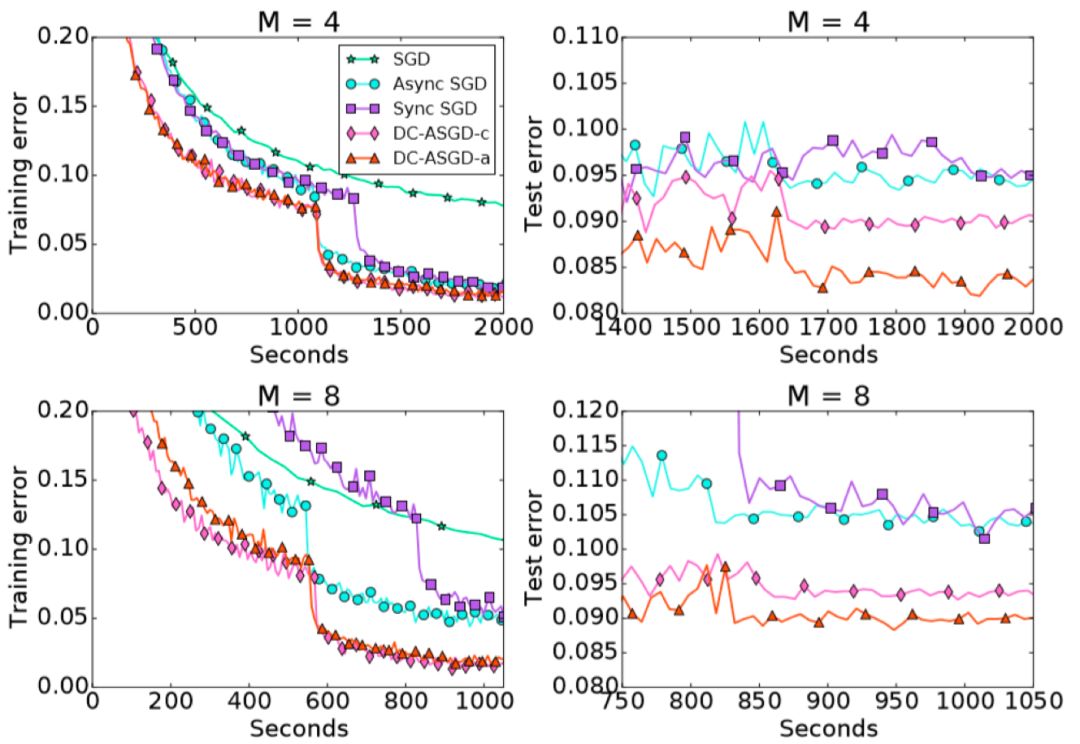
圖4 DC-ASGD的訓(xùn)練/測試誤差_CIFAR-10
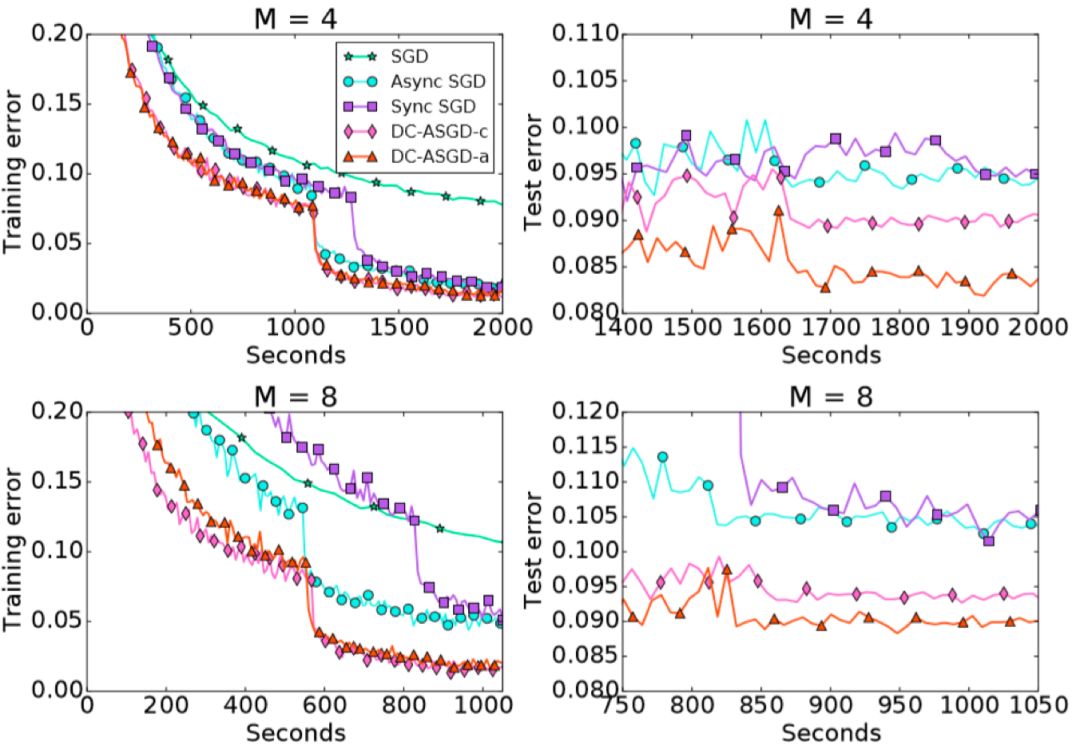
圖5 DC-ASGD的訓(xùn)練/測試誤差_ImageNet
可以觀察到,DC-ASGD算法與Async SGD算法相比,在相同的時間內(nèi)獲得的模型準(zhǔn)確率有顯著的提升,并且也高于Sync SGD,基本可以達到SGD相同的模型準(zhǔn)確率。
Ensemble-Compression算法:改進非凸模型的聚合方法
參數(shù)平均是現(xiàn)有的分布式深度學(xué)習(xí)算法中非常普遍的模型聚合方法。如果損失函數(shù)關(guān)于模型參數(shù)是凸的,以下不等式成立:

其中,K為計算節(jié)點個數(shù),wk是局部模型, 為參數(shù)平均后的模型,(x, y)為任意樣本數(shù)據(jù)。該不等式的左端是平均模型所對應(yīng)的損失函數(shù),右端是各個局部模型的損失函數(shù)值的平均值。可見,凸問題中參數(shù)平均可以保持模型的性能。
為參數(shù)平均后的模型,(x, y)為任意樣本數(shù)據(jù)。該不等式的左端是平均模型所對應(yīng)的損失函數(shù),右端是各個局部模型的損失函數(shù)值的平均值。可見,凸問題中參數(shù)平均可以保持模型的性能。
但是,對于非凸的神經(jīng)網(wǎng)絡(luò)模型,以上不等式將不再成立,因而平均模型的性能不再具有保證。這一點在實驗上也得到了驗證:如圖6所示,對于不同的交互頻率(尤其是較低頻的交互),參數(shù)平均通常會大幅度拉低訓(xùn)練精度,使得訓(xùn)練的過程極不穩(wěn)定。
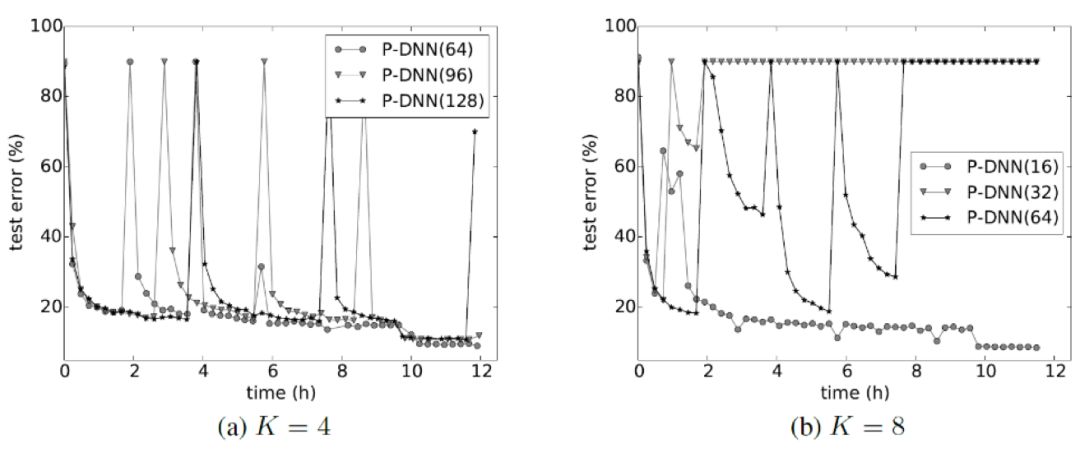
圖6 基于參數(shù)平均的分布式算法訓(xùn)練曲線(DNN模型)
為了解決這個問題,我們提出用模型集成替代模型平均,作為分布式深度學(xué)習(xí)中的模型聚合方式。雖然神經(jīng)網(wǎng)絡(luò)的損失函數(shù)關(guān)于模型參數(shù)是非凸的,但是關(guān)于模型的輸出一般是凸的(比如深度學(xué)習(xí)中常用的交叉熵?fù)p失)。這時,利用凸性可以得到如下不等式:
其中,不等式左側(cè)是集成(ensemble)模型的損失函數(shù)取值。可見,對于非凸模型,集成模型可以保持性能。
然而,每經(jīng)過一次集成,神經(jīng)網(wǎng)絡(luò)模型的規(guī)模就會增加倍,從而出現(xiàn)模型規(guī)模爆炸的問題。那么,有沒有一種既能利用模型集成的優(yōu)點,又能避免增大模型的方法呢?我們提出了一種同時基于模型集成和模型壓縮的模型聚合方法, 即集成-壓縮(ensemble-compression)方法。在每次集成之后,我們對集成所得的模型進行一次壓縮。
算法具體分為三個步驟:
各個計算節(jié)點依照本地優(yōu)化算法訓(xùn)練和局部數(shù)據(jù)訓(xùn)練出局部模型;
計算節(jié)點之間相互通信局部模型得到集成模型,并對(一部分)局部數(shù)據(jù)標(biāo)注上集成模型對它們的輸出值;
利用模型壓縮技術(shù)(比如知識蒸餾),結(jié)合數(shù)據(jù)的再標(biāo)注信息,在每個工作節(jié)點上分別進行模型壓縮,獲得與局部模型大小相同的新模型作為最終的聚合模型。為了進一步節(jié)省計算量,可以將蒸餾的過程和本地模型訓(xùn)練的過程結(jié)合在一起。
這種集成-壓縮的聚合方法,既可以通過集成獲得性能提升,又可以在學(xué)習(xí)的迭代過程中保持全局模型的規(guī)模。CIFA-10和ImageNet上的實驗結(jié)果也很好地驗證了集成-壓縮聚合方法的有效性(見圖7和圖8)。當(dāng)工作節(jié)點之間相互通信的頻率較低時,參數(shù)平均方法表現(xiàn)會很差,但模型集成-壓縮的方法卻依然能取得理想的效果。這是因為集成學(xué)習(xí)在子模型具有多樣性時效果更好,而較低的通信頻率會導(dǎo)致各個局部模型更加分散,多樣性更強;同時,較低的通信頻率意味著較低的通信代價。因此,模型集成-壓縮的方法更適用于網(wǎng)絡(luò)環(huán)境比較差的場景。
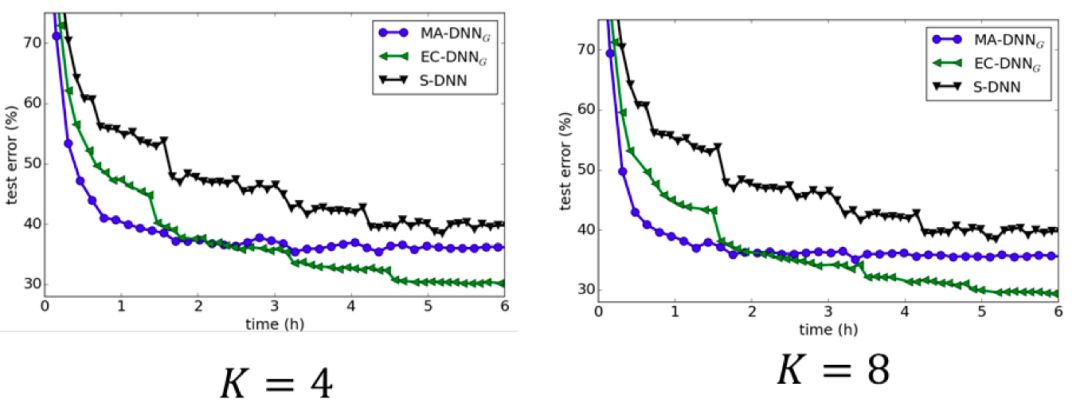
圖7 CIFAR數(shù)據(jù)集上對比各種分布式算法
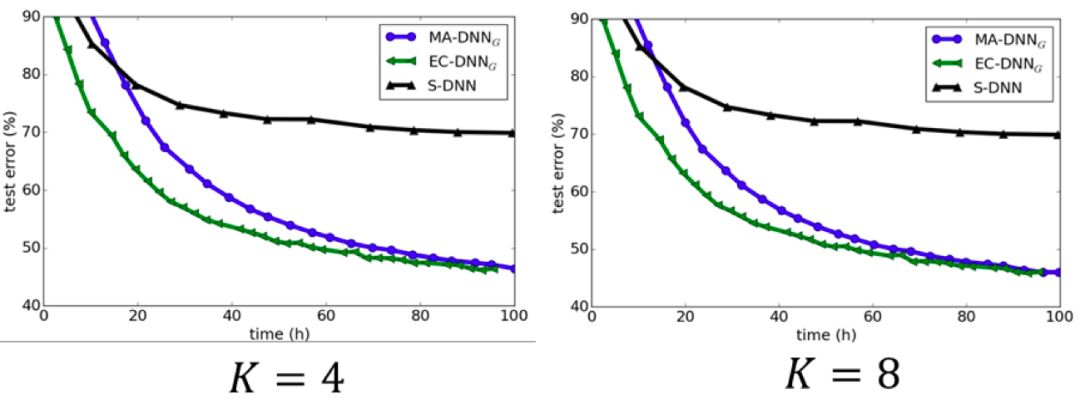
圖8 ImageNet數(shù)據(jù)集上對比各種分布式算法
基于模型集成的分布式算法是一個比較新的研究領(lǐng)域,還存在很多沒有解決的問題。比如說當(dāng)工作節(jié)點非常多的時候或者本地模型本身就很大的時候,集成模型的規(guī)模會變得非常大,這會帶來較大的網(wǎng)絡(luò)開銷。另外,當(dāng)集成模型較大時,模型壓縮也會變成一個較大的開銷。值得注意的是,在ICLR 2018上,Hinton等人提出的Co-distillation方法,盡管在動機上和這個工作不同,但是其算法和這個工作非常相似。如何理解這些關(guān)聯(lián)和解決這些局限性將催生新的研究,感興趣的讀者可以對此進行思考。
隨機重排下算法的收斂性分析:改進分布式深度學(xué)習(xí)理論
最后,簡單介紹一個我們最近在改進分布式深度學(xué)習(xí)理論方面的工作。
分布式深度學(xué)習(xí)中常用的數(shù)據(jù)分配策略是隨機重排之后均等切分。具體來說,是將所有訓(xùn)練數(shù)據(jù)隨機地打亂順序,得到數(shù)據(jù)的一個重排列,然后將數(shù)據(jù)集按順序等分,并將每一份存放在計算節(jié)點上。在數(shù)據(jù)被過完一輪后,如果收集所有的局部數(shù)據(jù)并重復(fù)上述過程,一般被稱為“全局重排”,如果只是對局部數(shù)據(jù)進行隨機重排,一般被稱為“局部重排”。
現(xiàn)有的絕大部分分布式深度學(xué)習(xí)理論中都假定數(shù)據(jù)是獨立同分布的。然而,基于Fisher-Yates算法的隨機重排實際上與無放回抽樣等價,訓(xùn)練數(shù)據(jù)之間不再是獨立同分布的了。于是,每一輪所計算的隨機梯度也不再是精確梯度的無偏估計,所以以往分布式隨機優(yōu)化算法的理論分析方法不再適用,已有的收斂性結(jié)果也不一定仍然成立。
我們利用Transductive Rademancher Complexity作為工具,給出了隨機梯度相對于精確梯度的偏差上界,證明了隨機重排下分布式深度學(xué)習(xí)算法的收斂性分析。
假設(shè)目標(biāo)函數(shù)光滑(不一定是凸函數(shù)),系統(tǒng)中有K個計算節(jié)點,訓(xùn)練輪數(shù)(epoch)為S,總訓(xùn)練數(shù)據(jù)有n個,考慮分布式SGD算法。
(1)如果采用全局隨機重排數(shù)據(jù)分配策略,算法的收斂速率為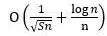 ,其中非i.i.d.性質(zhì)帶來的額外誤差為
,其中非i.i.d.性質(zhì)帶來的額外誤差為 。因此,當(dāng)過數(shù)據(jù)的輪數(shù)遠遠小于訓(xùn)練樣本數(shù)目時(S ?n),額外誤差的影響可以忽略。考慮到現(xiàn)有的分布式深度學(xué)習(xí)任務(wù)中,S ?n是很容易滿足的,所以全局隨機重排不會影響分布式算法的收斂速率。
。因此,當(dāng)過數(shù)據(jù)的輪數(shù)遠遠小于訓(xùn)練樣本數(shù)目時(S ?n),額外誤差的影響可以忽略。考慮到現(xiàn)有的分布式深度學(xué)習(xí)任務(wù)中,S ?n是很容易滿足的,所以全局隨機重排不會影響分布式算法的收斂速率。
(2)如果采用局部重排策略數(shù)據(jù)分配策略,算法的收斂速率為 ,其中非i.i.d.性質(zhì)帶來的更大的額外誤差
,其中非i.i.d.性質(zhì)帶來的更大的額外誤差 。原因是,由于隨機重排是本地局部進行的,不同計算節(jié)點之間的數(shù)據(jù)沒有進行交互,數(shù)據(jù)的差異性更大,隨機梯度的偏差也更大。當(dāng)過數(shù)據(jù)的輪數(shù)S?n/K2時,額外誤差的影響可以忽略。也就是說,使用局部重排數(shù)據(jù)分配策略時,算法中過數(shù)據(jù)的輪數(shù)要收到計算節(jié)點數(shù)目的影響。如果計算節(jié)點數(shù)比較多,過的輪數(shù)不能太大。
。原因是,由于隨機重排是本地局部進行的,不同計算節(jié)點之間的數(shù)據(jù)沒有進行交互,數(shù)據(jù)的差異性更大,隨機梯度的偏差也更大。當(dāng)過數(shù)據(jù)的輪數(shù)S?n/K2時,額外誤差的影響可以忽略。也就是說,使用局部重排數(shù)據(jù)分配策略時,算法中過數(shù)據(jù)的輪數(shù)要收到計算節(jié)點數(shù)目的影響。如果計算節(jié)點數(shù)比較多,過的輪數(shù)不能太大。
目前,分布式深度學(xué)習(xí)領(lǐng)域的發(fā)展非常迅速,而以上工作只是我們研究組所做的一些初步探索。希望本文能夠讓更多的研究人員了解“分布式”需要與“深度學(xué)習(xí)”進行深度融合,大家一起推動分布式深度學(xué)習(xí)的新發(fā)展!
-
加速器
+關(guān)注
關(guān)注
2文章
796瀏覽量
37839 -
機器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8406瀏覽量
132562 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5500瀏覽量
121111
原文標(biāo)題:分布式深度學(xué)習(xí)新進展:讓“分布式”和“深度學(xué)習(xí)”真正深度融合
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
深度學(xué)習(xí)模型是如何創(chuàng)建的?
TDA4對深度學(xué)習(xí)的重要性
什么是深度學(xué)習(xí)?使用FPGA進行深度學(xué)習(xí)的好處?
NVIDIA遷移學(xué)習(xí)工具包 :用于特定領(lǐng)域深度學(xué)習(xí)模型快速訓(xùn)練的高級SDK
針對線性回歸模型和深度學(xué)習(xí)模型,介紹了確定訓(xùn)練數(shù)據(jù)集規(guī)模的方法
基于預(yù)訓(xùn)練模型和長短期記憶網(wǎng)絡(luò)的深度學(xué)習(xí)模型
超詳細配置教程:用Windows電腦訓(xùn)練深度學(xué)習(xí)模型
大模型為什么是深度學(xué)習(xí)的未來?
深度學(xué)習(xí)框架區(qū)分訓(xùn)練還是推理嗎
深度學(xué)習(xí)如何訓(xùn)練出好的模型

如何基于深度學(xué)習(xí)模型訓(xùn)練實現(xiàn)圓檢測與圓心位置預(yù)測

如何基于深度學(xué)習(xí)模型訓(xùn)練實現(xiàn)工件切割點位置預(yù)測






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論