

近日,在國際計(jì)算機(jī)視覺競賽PASCAL VOC,中星微以89.0分的總成績位列第一,獲得目標(biāo)檢測單模型第一名。獲勝的模型是一步法的目標(biāo)檢測模型,本文帶來技術(shù)詳解。
近日,在PASCAL VOC comp4目標(biāo)檢測競賽中,中星微再創(chuàng)佳績,獲得了目標(biāo)檢測單模型第一名。
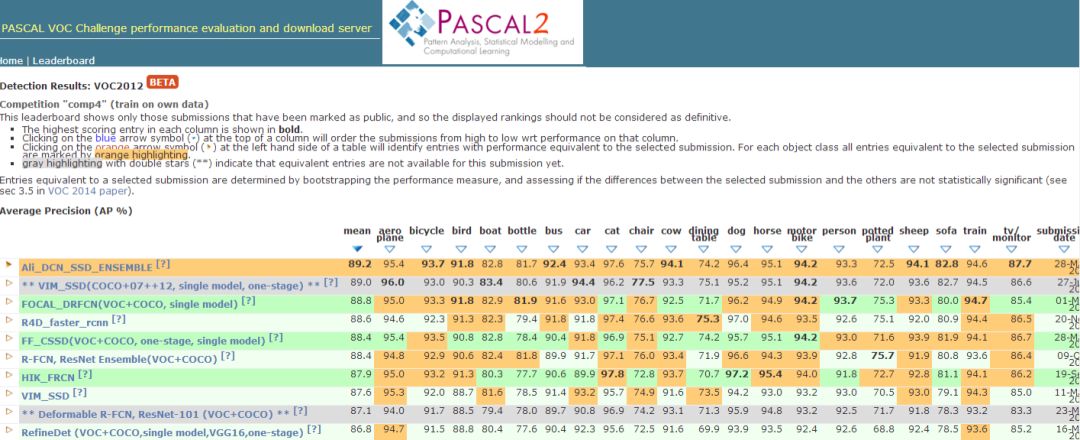
Pascal VOC是世界計(jì)算機(jī)視覺領(lǐng)域知名的競賽,比賽中,參賽者要對人、貓、鳥、飛機(jī)、汽車、船、盆栽等20類物體進(jìn)行檢測。由于訓(xùn)練樣本較少,場景變化多端,非常具有挑戰(zhàn)性。中星微人工智能參賽團(tuán)隊(duì)VIM_SSD以89.0分的總成績位列第一。
中星微人工智能芯片技術(shù)公司董事長兼總經(jīng)理張韻東表示:“本次參賽的模型適合終端設(shè)備部署的簡單模型一步法算法,能夠取得與云端服務(wù)器復(fù)雜多模型算法相媲美的結(jié)果,實(shí)屬不易。作為人工智能芯片公司,我們不僅要在芯片設(shè)計(jì)方面精益求精,同時(shí)更要在算法的精簡優(yōu)化方面取得突破,為客戶提供前端智能設(shè)備的整體解決方案。”
一步法目標(biāo)檢測模型
中星微本次提交的深度學(xué)習(xí)模型和上次參加比賽的深度學(xué)習(xí)模型基本一致,仍然沿用了一步法的目標(biāo)檢測模型,基礎(chǔ)網(wǎng)絡(luò)采用VGG16,并未使用ResNet-101, ResNet-152等更復(fù)雜的網(wǎng)絡(luò),保證精度的情況下速度更快。第一次參加比賽的成績是87.6,這次是89.0,精度提高很多。該結(jié)果不僅領(lǐng)先于所有的一步法算法,同時(shí)擊敗了所有的二步法算法。
中星微人工智能芯片技術(shù)公司研發(fā)副總裁艾國表示:“本次我們深度學(xué)習(xí)模型是上次模型的全面升級,仍然沿用了一步法的網(wǎng)絡(luò)架構(gòu),重點(diǎn)改進(jìn)和優(yōu)化了訓(xùn)練相關(guān)的方法和技術(shù),在不增加算法復(fù)雜度的情況下,使得網(wǎng)絡(luò)的精度越來越高,這是我們公司要打造的核心技術(shù)。在前端嵌入式設(shè)備計(jì)算資源受限的情況下,我們通過調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)和訓(xùn)練的方法提高精度,而不是不斷增加網(wǎng)絡(luò)復(fù)雜度。”
VOC 2012數(shù)據(jù)集圖片測試結(jié)果
不僅是單模型,而且是一步法,尤其適用于嵌入式NPU
多模型融合是深度學(xué)習(xí)比賽中經(jīng)常使用到的一個(gè)利器,它通常可以在各種不同的機(jī)器學(xué)習(xí)任務(wù)中使結(jié)果獲得提升。顧名思義,多模型融合就是綜合考慮多個(gè)不同模型的情況,并將它們的結(jié)果融合到一起。
雖然通過模型進(jìn)行融合往往效果較好,但是其實(shí)現(xiàn)代價(jià)和計(jì)算開銷也比較大。目前,中星微主要是從實(shí)際項(xiàng)目應(yīng)用的角度來考慮,特別是前端應(yīng)用,一般都是單模型。當(dāng)然,后期也會考慮使用模型融合,來提升比賽結(jié)果的精度。
下表是目前PASCAL VOC競賽前十名,可以看出,下面算法中大部分應(yīng)用了更復(fù)雜的基礎(chǔ)網(wǎng)絡(luò)ResNet-101和ResNet-152,并且是兩步法,也有多模型融合(ensemble)。而中星微的模型不僅是單模型,而且是一步法,在嵌入式NPU可以達(dá)到很高的幀率。
| Method | Backbone | mAP (%) | ||
| Ali_DCN_SSD_ENSEMBLE | ResNet-101 | 89.2 | ensemble | |
| VIM_SSD(COCO+07++12, single model, one-stage) | VGG16 | 89.0 | one-stage | single |
| FOCAL_DRFCN(VOC+COCO, single model) | ResNet-152 | 88.8 | two-stage | single |
| R4D_faster_rcnn | - | 88.6 | - | - |
| FF_CSSD(VOC+COCO, one-stage, single model) [?] | ResNet101 | 88.4 | one-stage | single |
| R-FCN, ResNet Ensemble(VOC+COCO) | ResNet | 88.4 | two-stage | ensemble |
| HIK_FRCN | ResNet-101 | 87.9 | two-stage | single |
| VIM_SSD | VGG16 | 87.6 | one-stage | single |
| Deformable R-FCN, ResNet-101 (VOC+COCO) | ResNet-101 | 87.1 | two-stage | single |
| RefineDet(VOC+COCO,singlemodel,VGG16,one-stage) | VGG16 | 86.8 | one-stage | single |
阿里巴巴達(dá)摩院多模型融合網(wǎng)絡(luò)Ali_DCN_SSD_ENSEMBLE的得分是89.2,只比中星微單模型網(wǎng)絡(luò)高了0.2點(diǎn),而阿里巴巴達(dá)摩院FF_CSSD(VOC+COCO, one-stage, single model)一步法單模型的精度是88.4,基礎(chǔ)網(wǎng)絡(luò)是ResNet101,和中星微差了0.6個(gè)點(diǎn)。
從安防監(jiān)控到保護(hù)瀕危野生動物,應(yīng)用場景廣泛
目標(biāo)檢測技術(shù)應(yīng)用廣泛,是AI場景落地的關(guān)鍵性技術(shù)之一。中星微的深度學(xué)習(xí)模型運(yùn)行在前端智能設(shè)備(如智能攝像頭上),廣泛用于安防監(jiān)控、安全生產(chǎn)、環(huán)境保護(hù)、個(gè)人健康監(jiān)測等領(lǐng)域。
下面是一個(gè)環(huán)境保護(hù)的例子,在我國西部及藏區(qū)應(yīng)用,其采用人工智能、深度學(xué)習(xí)對野生保護(hù)動物進(jìn)行檢測、識別、統(tǒng)計(jì)。從而達(dá)到對野生動物保護(hù),生態(tài)環(huán)境平衡的目標(biāo)。根據(jù)國家要求,增強(qiáng)保護(hù)野生動物、保護(hù)環(huán)境的意識,特別是對瀕臨滅絕的野生動物的研究和保護(hù),更要加大力度;要從科研、技術(shù)角度解決野生動物保護(hù)和數(shù)量的實(shí)時(shí)狀態(tài)。
如下圖,是對藏羚羊的檢測、識別、統(tǒng)計(jì):
如下圖,是對藏野驢的監(jiān)測、識別、統(tǒng)計(jì):
概念說明
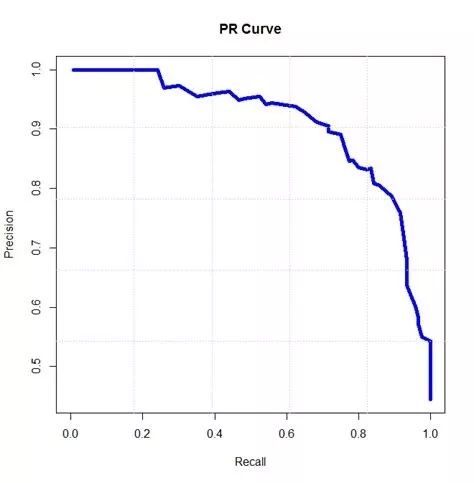
精度:目標(biāo)檢測中衡量識別精度的指標(biāo)是mAP(mean average precision)。在多個(gè)類別物體檢測中,每一個(gè)類別都可以根據(jù)recall和precision繪制一條曲線,AP就是該曲線下的面積,mAP是多個(gè)類別AP的平均值,理論上最高mAP為1.0,也就是我們說的100分,89分其實(shí)就是0.89 mAP,下面是示例說明。
前端智能和云端智能:前端智能是將智能分析算法嵌入到前端設(shè)備,拿安防攝像機(jī)舉例,就是攝像機(jī)采集的視頻內(nèi)容立即進(jìn)行分析,提取出畫面中關(guān)鍵的、感興趣的、有效的信息,形成結(jié)構(gòu)化的數(shù)據(jù)。前端智能因受各種資源限制,需要對算法復(fù)雜度、網(wǎng)絡(luò)模型大小等有限制。
云端智能是將前端傳感器采集的數(shù)據(jù)通過云端來完成智能分析,一般通過大型的GPU服務(wù)器來完成。因此相對于前端智能,計(jì)算資源、內(nèi)存資源、存儲資源、網(wǎng)絡(luò)資源等都較大,因此對算法模型的限制比較小,可以部署很大的很復(fù)雜網(wǎng)絡(luò)模型。
-
中星微
+關(guān)注
關(guān)注
0文章
38瀏覽量
11422 -
人工智能
+關(guān)注
關(guān)注
1804文章
48691瀏覽量
246423 -
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1706瀏覽量
46568
原文標(biāo)題:目標(biāo)檢測競賽利器:中星微一步法模型獲國際算法競賽第一名!
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
計(jì)算機(jī)視覺有哪些優(yōu)缺點(diǎn)
地平線科研論文入選國際計(jì)算機(jī)視覺頂會ECCV 2024






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論