 百度Apollo首個自動駕駛安全報告產生,2020年量產L3級別產品上市
百度Apollo首個自動駕駛安全報告產生,2020年量產L3級別產品上市
去年 10 月,全球自動駕駛研發先行者 Waymo 發布了長達 43 頁的安全報告,里面詳細說明了如何裝備和訓練自動駕駛車輛,從而避免駕駛過程中一些意外情況的發生。
今年 1 月,美國車企巨頭通用也發布了“2018 自動駕駛安全報告”,詳盡介紹了其自動駕駛汽車的理念、設計過程和技術特點。
發布詳盡的安全報告,似乎已經成為這些巨頭們推動自動駕駛向前發展的一項基礎工作。
作為國內最大的自動駕駛開放平臺,百度 Apollo 在 2018 百度 AI 開發者大會(Creat 2018)上,重磅發布了“Apollo Pilot 安全報告”。
APC:中國首個 L3 自動駕駛產品
這里的 Apollo Pilot,是百度 Apollo 平臺專門針對量產所設計的自動駕駛產品的總稱,所以它自然包含了乘用車、商用車、物流車等自動駕駛車型產品以及針對每種車型設計的自動駕駛軟硬件系統方案。
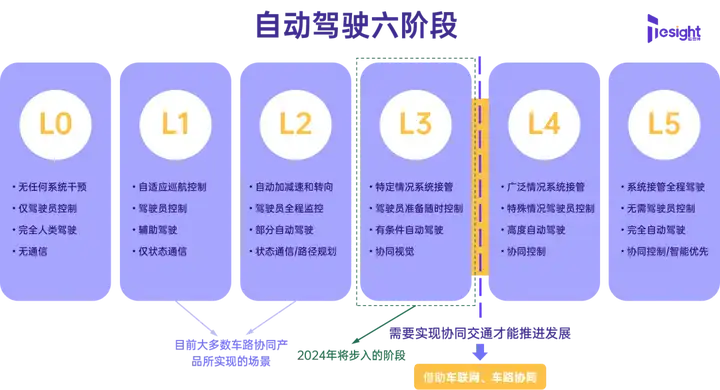
借著這個報告,百度 Apollo 首推的一款產品就是 Apollo Pilot For PassengerCar(簡稱“APC”),百度將其稱為“中國首個 L3 級自動駕駛產品”。顧名思義,PassengerCar 的主要功能就是載人,而更為官方的定義是:APC 指“提供有駕駛員的車輛在限定場景下的自動駕駛系統;根據系統請求,駕駛員需要做出適當的響應,系統將會至少提前 10 秒發出請求,以便給駕駛員保留安全響應時間”。
報告提到,現在市面上存在的自動駕駛產品,都要求用戶時刻保持接管能力,一旦發生事故,責任屬于用戶,這反而需要用戶更加集中精神,容易誘發疲勞駕駛。APC 為了解決這樣的問題,提出了“可適用場景”(Operational Design Domain)的概念,簡言之,就是當車輛處在可適用場景范圍內時,車輛基本上可以自己駕駛;而在即將駛出該范圍時,系統會給用戶預留至少 10 秒的接管時間。通過這種設定,用戶能在有需要的場景下真正享用安全的自動駕駛服務。
百度為 APC 設定的量產上市時間點是 2020 年,將優先在三個高頻場景下實現安全自動駕駛能力。這三個高頻場景所對應的自動駕駛系統分別是:高速自動駕駛系統、城市交通擁堵輔助系統以及自動泊車系統。
其中,高速自動駕駛系統能讓車輛在高速和城市環路上實現自動駕駛功能,將對車輛進行加速減速、車道保持和自主變道等控制;城市交通擁堵輔助系統則通過堵車場景中自動駕駛系統的啟用降低追尾風險,環節用戶一直專注跟車所造成的疲勞感;自動泊車系統是最好的理解的,包括自主泊車和召喚車輛兩項能力。
安全報告探討了哪些內容?
為了保證 APC 的安全穩定運行,百度 Apollo 為其設定了一個整體的安全框架,包括安全感、安全駕駛、事故預防、事故介入以及事故后處理五大逐層遞進的安全設計。也想以此來引導用戶形成正確的自動駕駛系統使用習慣。

在完成對 APC 產品的定義之后,百度 Apollo 用安全報告接下來長達 60 多頁的篇幅詳細介紹了該產品的“安全設計”和“安全運行”兩大方面的重要內容。
其中“安全設計”一部分花了 4 個章節來介紹,主要包括操作安全、環境安全、行為安全和功能安全這些內容,可以看出這部分內容主要是針對車輛與系統本身的設計來說的;而“安全運行”部分則包含 3 個章節,分別是質量安全、安全進化以及機制安全,其中討論的細節問題有諸如路測、信息安全、OTA 系統、法律法規以及事故處理機制。
為了保證自動駕駛車輛能對自身所處的靜態環境和動態環境有清晰明確的認知,百度 Apollo 為 APC 設計了 3 大系統,分別是 XMI 系統、環境建模系統以及 DPS 駕駛策略系統。
其中,XMI 包括 HMI 和 EMI,EMI 指的是自動駕駛系統與環境進行輸入和輸出的接口,XMI 就是車內交互和車外交互的集合;環境建模系統則包括通過車身傳感器、地圖以及 V2X 設施;而DPS 駕駛策略系統則希望達到兩個目標:全面性和可解釋性,主要還是為了應對監管和法律問題。
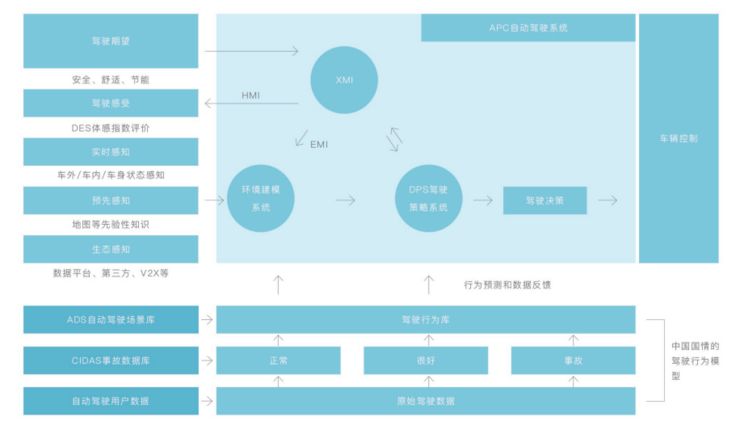
以 APC 產品的 HMI 設計為例,從安全報告中了解到的信息是,百度 Apollo 特意設計了共享全面屏、環繞氛圍燈、智能方向盤和體感座椅等組件,為自動駕駛汽車駕駛員帶來更為沉浸的交互體驗。
另外,在自動駕駛汽車的接管機制上,百度 Apollo 針對其 APC 產品有一套明確邏輯:
目前階段的 APC 還只能在經過大量訓練和測試的限定操作環境(上文提及的 ODD)內自動駕駛,超出 ODD 邊界時需要用戶接管。
而且,APC 的接管系統并不想讓用戶一直在需要接管和不需要接管的狀態之間頻繁切換,所以該系統會進行絕大部分的自動處理,包括實時監控、診斷、暫時的降級運行等,其要實現的目標是,在自動駕駛場景下的 95% 以上的時間里,都不會讓用戶做好接管車輛的準備,這才能真正解放用戶。
了解到,APC 專門設計了“特別關懷安全停車”的功能,當自動駕駛系統遇到人員狀態異常時(比如駕駛員睡著或者突發疾病),APC 在保證安全剎停之外,還會一直持續自動駕駛到可停泊的安全區域進行停車,保證車輛和人員安全。
有意思的是,在這份安全報告中,百度 Apollo 還引入了 Mobileye 的自動駕駛責任敏感安全模型(Responsibility-Sensitive Safety,RSS 模型),會將其融合應用在 APC 的安全模型中。未來雙方將合作打造適用于中國駕駛環境的安全模型和駕駛策略,并在 Apollo 平臺上進行開放。
安全報告在后續的內容當中還探討了如何對自動駕駛汽車的駕駛員進行培訓以及如何進行安全測試,同時還有如何推動相關法律法規、保障機制建設等介紹。
在駕駛員培訓方面,APC 系統將通過 4 個方面的數據收集和訓練,來培養一個具備全面能力的自動駕駛“老司機”。具體包括:情景訓練、監控發現能力訓練、路況訓練以及事故應對能力訓練。
在路測和數據收集方面,百度 Apollo 搭建了一個名為 ADS 的場景庫,覆蓋了前文所述的 APC 的三大高頻應用場景,還包含了光照、季節、時間段、天氣、全國各種區域和地形、障礙物類型、路面狀況、隧道匝道、分流合流等各種常見及極限駕駛狀況的數據。為了拿到這些數據,百度 Apollo 方面稱他們已經收集了數億公里的真實道路場景數據。
以高速/環路自動駕駛功能的整車測試為例,在交付前,百度 Apollo 將確保其進行 120 萬公里以上的整車測試,相當于對全國 30 萬公里的高速和環路的每一公里都進行 4 次全量覆蓋。
除了實實在在的物理安全,自動駕駛系統的網絡信息安全問題也同樣重要,所以百度 Apollo 在設計系統時為對外通信層、接入網關層以及車內應用層都設置了防護。這些防護將成為其 APC 產品的標準配置。
當然,APC 產品要走向量產,還需要滿足各類車規級的嚴苛要求,保證穩定性。在報告中,百度 Apollo 提到,他們在車輛設計之初就在和整車廠的工程師進行合作,對各種有可能出現的失效和風險進行把控,并且在軟件、硬件、系統以及整車層面進行標準測試。
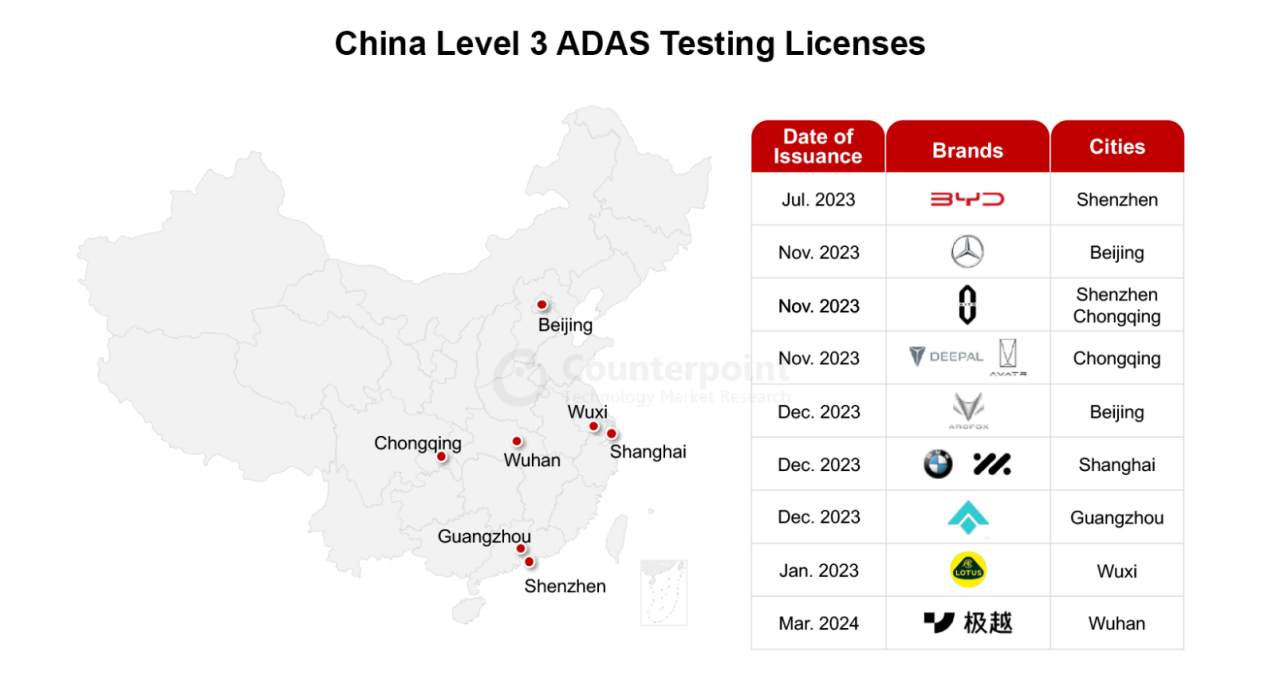
在法律法規建設方面,目前國內多個城市已經開始下發自動駕駛路測牌照,百度 Apollo 也拿到了其中的多塊牌照,未來還將為中國自動駕駛相關法律法規建設提供更多經驗。
-
智能
+關注
關注
8文章
1709瀏覽量
117489 -
百度
+關注
關注
9文章
2268瀏覽量
90363 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166394
原文標題:百度Apollo發布中國首個自動駕駛安全報告,L3級別產品2020年量產上市
文章出處:【微信號:AItists,微信公眾號:人工智能學家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
2024年中國將邁入L3自動駕駛時代,特斯拉是華為/小鵬最大敵手?
百度Apollo開放平臺10.0正式發布
百度獲香港首個自動駕駛先導牌照
百度Apollo計劃年內部署千臺無人車
百度發布全球首個L4級自動駕駛大模型Apollo ADFM
特斯拉與百度合作掃清自動駕駛關鍵障礙
百舸爭流之勢!L3級自動駕駛進入路測階段
康謀方案 | L2進階L3,數據采集如何助力自動駕駛
廣汽集團獲得L3自動駕駛路測牌照
百度發布Apollo開放平臺9.0
自動駕駛產業鏈爆發前夜?多家車企宣布已獲得L3級自動駕駛路測牌照






 工商網監
工商網監
評論