 AFS自適應前照燈系統的詳細原理介紹及與傳統前燈相比有什么優勢?
AFS自適應前照燈系統的詳細原理介紹及與傳統前燈相比有什么優勢?
AFS是指能自動改變兩種以上的光型以適應車輛行駛條件變化的前照燈系統。AFS是目前國際在車燈照明領域最新的技術之一,同時也是一個和行車安全息息相關的主動式安全系統。
AFS的研發背景
傳統的前照燈系統是由:近光燈、遠光燈、行駛燈和前霧燈組合而成。在城市道路行駛并且限速的情況下,主要采用近光;在鄉間道路或者高速公路上高速行駛的時候,主要采用遠光;霧天行駛的時候,應該打開霧燈;白天行駛,應該打開行駛燈(歐洲標準)。
但是實際的使用中,傳統的前照燈系統存在著諸多問題。例如,現有近光燈在近距離上的照明效果很不好,特別是在交通狀況比較復雜的市區,經常會有很多司機在晚上將近光燈、遠光燈和前霧燈統統打開;車輛在轉彎的時候也存在照明的暗區,嚴重影響了司機對彎道上障礙的判斷;車輛在雨天行駛的時候,地面積水反射前燈的光線,產生反射眩光等等。
歐洲汽車照明研究機構曾經就此作過做專項調查,結果顯示,歐洲司機們最希望改善的是陰雨天氣積水路面的照明,排在第二位的是鄉村公路的照明,接下來依次是彎道照明、高速公路照明和市區照明。
上述這些問題的存在,就使得研制一種具有多種照明功能的前照燈成為必要,并且這些功能的切換,出于安全上的考慮,必須是自動實現的。所以歐洲和日本相繼研制了這種自動適應車輛行駛狀態的前照燈系統——AFS(自適應前照燈系統)。
AFS實現的功能
陰雨天氣的照明
如圖1圖2所示,陰雨天氣,地面的積水會將行駛車輛打在地面上的光線,反射至對面會車司機的眼睛中,使其目眩,進而可能造成交通事故。
AFS有效的解決方法是:前燈發出如圖所示的特殊光型,減弱地面可能對會車產生眩光的區域的光強。
圖1雨天積水反射的AFS光線(側視)
雨天積水對AFS光線的反射(俯視)
鄉村道路的照明
在環境照明不好的鄉村道路上高速行駛的車輛,需要的是照得遠,照得寬的前照燈。同時AFS也不能產生使對面會車司機眩目的光線。
轉彎道路的照明
如圖3所示,傳統前燈的光線因為和車輛行駛方向保持著一致,所以不可避免的存在照明的暗區。一旦在彎道上存在障礙物,極易因為司機對其準備不足,引發交通事故。
AFS解決的方法是:車輛在進入彎道時,產生如圖4所示旋轉的光型,給彎道以足夠的照明。
圖3傳統前燈的彎道照明問題
圖4AFS的彎道旋轉照明
高速公路的照明
如圖5所示,車輛在高速公路上行駛,因為具有極高的車速,所以需要前照燈比鄉村道路照得更遠,照得更寬。而傳統的前燈卻存在著高速公路上照明不足的問題。
AFS采用了如圖6所示更為寬廣的光型解決這一問題。
圖5現有前燈在高速公路照明的問題
圖6AFS在高速公路上的照明
城市道路的照明
城市中道路復雜、狹窄。傳統前照燈近光如圖7所示,因為光型比較狹長,所以不能滿足城市道路照明的要求。
AFS在考慮到車輛市區行駛速度受到限制的情況下,可以產生如圖8所示的比較寬闊的光型,有效地避免了與岔路中突然出現的行人、車輛可能發生的交通事故。
圖7傳統前燈近光的照明的問題
圖8AFS城市道路的照明
AFS的工作原理
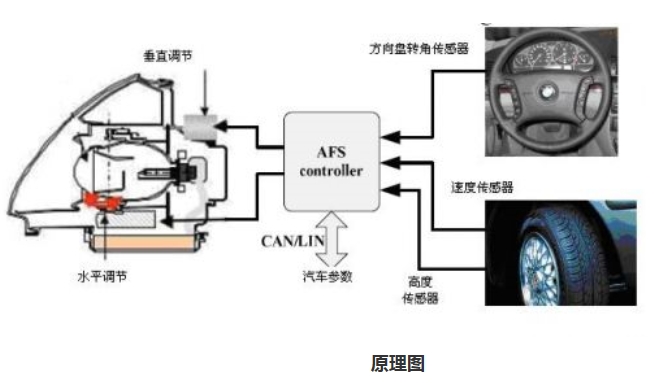
AFS是一個由傳感器組、傳輸通路、處理器和執行機構組成的系統。由于需要對多種車輛行駛狀態做出綜合判斷,客觀上決定了AFS是一個多輸入多輸出復雜的系統。
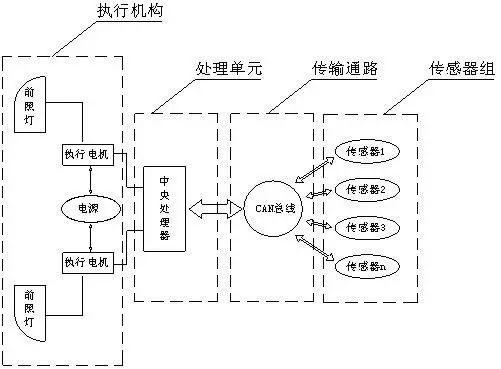
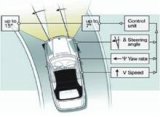
要實現不同的功能,AFS必須要從不同的傳感器取得不同的車輛行駛信息。比如,為了實現彎道旋轉照明的功能,除了要從車速傳感器獲取車速、方向盤角度傳感器獲取方向盤轉角、車身高度傳感器獲得車身傾斜角度以外,還必須通過一些特殊的傳感器,獲取車輛實際轉向角度的信息;為了實現陰雨天照明的功能,就要從濕度傳感器獲得是否陰雨的信息……
因為在通常的情況下,AFS所需獲得部分信息也被其他的控制系統采用,即AFS實際上要和其他的系統共用一些傳感器,所以,必須通過總線這一傳輸通路以后,才能實現這些傳感器信息的共享。
AFS接受到的信息,除了車速,車身轉角和車身傾斜角等等少數信息是可以定量的以外,其他傳感器發回的信息大多只能到定性的程度。諸如,地面平不平,雨下得大不大等等車身之外的環境信息,都是不能精確量化的。這就使得AFS的中央處理器能夠進行模糊的判斷。并且很多信息之間是相互關聯的。比如,在陰雨天氣,路面積水的情況下,車輛的轉角和晴天相比有極大的差異……AFS的中央處理器不僅要做模糊的判斷,而且還要隨著這種環境的改變不斷的修整系統參數,這使得AFS最終成為一個自適應的模糊系統。
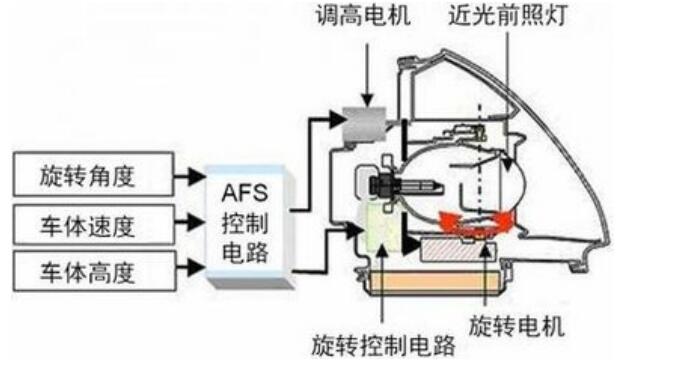
AFS的執行機構是由一系列的馬達和光學機構組成的。一般有投射式前照燈,對前燈垂直角度進行調整的調高馬達,對前燈水平角度進行調整的旋轉馬達,對基本光型進行調整的可移動光柵,此外還有一些附加燈如角燈等等。
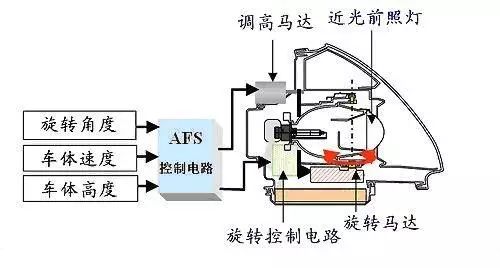
以日本DENSO公司的AFS為例,進行簡要的說明:
DENSO公司的AFS系統目前只能實現彎道照明的功能,所以其系統比較的簡單。系統從方向盤角度傳感器、車體速度傳感器、車身高度位移傳感器分別取得轉向輪旋轉角度、車體速度和車身傾斜度的精確信息。其中角度和速度信息通過中央控制電路精確計算以后產生輸出信號控制旋轉馬達對前燈(投射式)進行水平旋轉,傾斜度信息控制調高馬達對前燈進行垂直旋轉。
AFS系統功能實現的技術基礎
目前研發的AFS系統的難點就是缺乏有效、廉價的傳感器能對基本道路狀況的做出判斷。要完成路面積水、轉彎道路、高速公路、鄉村道路和城市道路的綜合識別,即便是采用下一代基于CCD的圖像識別技術還是一個不小的挑戰。
所以時下量產的AFS系統都是運用了間接判斷,有限的實現個別功能。如采用車身高度傳感器感知車身的縱傾角,使前燈保持和路面水平;采用方向盤轉角傳感器感知前輪轉角,結合車速判斷道路的彎曲狀況,實現彎道旋轉的功能;采用自動雨刮的濕度傳感器感知雨量,實現前燈反光遮擋的功能。
車身縱傾調光功能
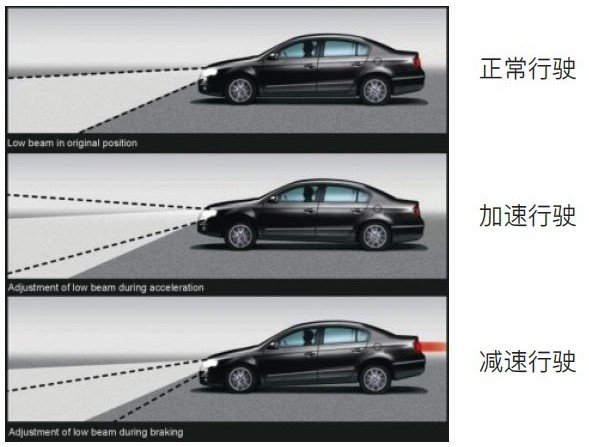
車身會因為前后負載的不同,改變縱傾的角度,安裝在車身上的車燈射出光線的角度也會發生改變,對夜間行車安全產生不利的影響。
如圖所示,上部是正常的前燈出射角度和照明范圍,中下部分別是后傾和前傾情況下的前燈角度和照明范圍,其差異是非常明顯的。另外,車輛的加速和減速也能改變車身的縱傾角。
采用安裝在懸架和車身上的車身高度傳感器,獲取前軸和后軸的高度變化量,并依據軸距計算車身縱傾角度。車身縱傾角度的變化量,就是前燈光軸角度的變化量,通過調光電機的運作,反向調整此角度變化,就可以使光軸回復到原先的狀態,保持水平。
彎道旋轉功能
傳統國標對前燈照明有很嚴格的要求。25m測試屏上實測到前燈(單燈近光)的等照度曲線(0.5~31lux),經由計算各種不同能量的光線得到在空間中生成的光網,下圖紅線所圍成的空間區域就是前燈(單燈近光)1lux的光網,則雙燈能夠照亮路面上藍線圍成的區域。
無疑此近光完全滿足國標的配光要求,但這并不能保證駕駛員能發現彎道上近在咫尺的危險,因為橫向固定光軸的傳統前燈存在著盲區。如果前近光燈能夠提前旋轉一個角度,左燈旋轉15度,右燈旋轉9度,可見區域就能覆蓋大半個轉彎半徑37m左右的彎道,從而提早的發現道路上存在的危險,應對處理。
彎道上發現危機最極端的應對措施就是制動,前燈需要旋轉的角度就是要保證這個有效的制動距離。一般來說從發現危機、踩下剎車到制動器啟動需要1.5秒的時間,這段時間車輛以初始速度行駛;制動器工作后,如不出現甩尾、抱死的情況,其制動距離大致和直線制動相同。二者相加,所需的距離必須要在前燈旋轉后的照明區域內。
陰雨天燈光遮擋功能
陰雨、壞天氣下的照明一直是影響夜間行車安全的主要因素,恐怕很多人都會有被的前燈反光晃倒的經歷。車輛前燈分為遠光和近光的原因,就是因為近光燈能有效避免光線直射到對面會車駕駛員的眼中,但在路面積水的狀況下,這種精心的設計完全失效。
所以AFS具備功能首位的就是壞天氣下的照明,即將經過反射后射進會車的光線(紅色區域)遮擋。對應到25m測試屏等照度曲線上的遮擋范圍見圖11的左下方的白色區域。
目前尚未接觸到能夠感知路面積水的傳感器,只是聽說可以采用自動雨刮的雨量傳感器替代。遮擋需根據反射光線逆推到等照度曲線,并根據前燈的實際配光效果作細致的調整。
-
安全系統
+關注
關注
0文章
410瀏覽量
66922 -
AFS
+關注
關注
0文章
20瀏覽量
29136 -
前照燈
+關注
關注
0文章
16瀏覽量
8565
原文標題:讓汽車擁有一雙智慧的“眼睛”——AFS自適應前照燈系統
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
LED前照燈和自適應汽車照明的當前發展回顧
整體式LED自適應前照燈照明系統
自適應前照燈系統(AFS)ECU的開發

自適應前照燈系統AFS可以感應路況和車輛方向優化照明模式提高駕駛員夜間能見度
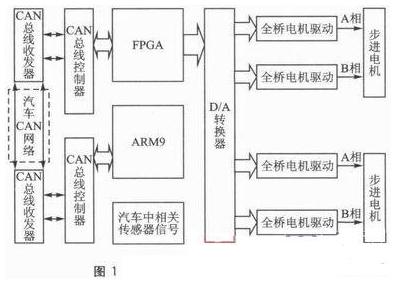
基于FPGA與CAN總線控制器的自適應汽車前照燈系統的設計
關于自適應前照燈系統的性能分析
汽車前照燈隨動轉向系統AFS是如何控制車燈方向的
環境光傳感芯片ALS-AK510在汽車自適應前照燈系統中的應用






 工商網監
工商網監
評論