 有關自動駕駛汽車硬件系統的內容
有關自動駕駛汽車硬件系統的內容
本文分享了有關自動駕駛汽車硬件系統的內容,讓開發者學習技術的同時,進一步了解自動駕駛汽車的硬件架構、傳感器、線控等硬件系統。主要從以下五個方面展開:自動駕駛系統的硬件架構、自動駕駛的傳感器、自動駕駛傳感器的產品定義、自動駕駛的大腦、自動駕駛汽車的線控系統。
如果說人工智能技術將是自動駕駛汽車的大腦,那么硬件系統就是它的神經與四肢。從自動駕駛汽車周邊環境信息的采集、傳導、處理、反應再到各種復雜情景的解析,硬件系統的構造與升級對于自動駕駛汽車至關重要。
上周,來自百度自動駕駛技術部高級產品經理—王石峰,在Apollo開發者社群內分享了有關自動駕駛汽車硬件系統的內容,讓開發者學習Apollo技術的同時,進一步了解自動駕駛汽車的硬件架構、傳感器、線控等硬件系統。
錯過社群直播的開發者可以從以下資料回顧干貨內容:
自動駕駛汽車硬件系統概述
今天,我將從五個方面為大家做自動駕駛汽車硬件系統概述的內容分享,希望大家可以通過我的分享,對硬件系統的基礎有個全面的了解:
一、自動駕駛系統的硬件架構
二、自動駕駛的傳感器
三、自動駕駛傳感器的產品定義
四、自動駕駛的大腦
五、自動駕駛汽車的線控系統
這段視頻想必大家都看過很多次了,這里就不再播放了。
根據美國國家運輸安全委員會的調查報告,當時涉事Uber汽車——一輛沃爾沃SUV系統上的傳感器在撞擊發生6s前就檢測到了受害者,而且在事故發生前1.3秒,原車自動駕駛系統確定有必要采取緊急剎車,此時車輛處于計算機控制下時,原車的緊急剎車功能無法啟用。于是剎車的責任由司機負責,但司機在事故發生前0.5s低頭觀看視頻未能抬頭看路。
從事故視頻和后續調查報告可以看出,事故的主要原因是車輛不在環和司機不在環造成的。Uber在改造原車加裝自動駕駛系統時,將原車自帶的AEB功能執行部分截斷造成原車ADAS功能失效。自動駕駛系統感知到受害者確定要執行應急制動時,并沒有聲音或圖像警報,此時司機正低頭看手機也沒有及時接管剎車。
目前絕大多數自動駕駛研發車都是改裝車輛,相關傳感器加裝到車頂,改變車輛的動力學模型;改裝車輛的剎車和轉向系統,也缺乏不同的工況和兩冬一夏的測試。圖中Uber研發用車是SUV車型自身重心就較高,車頂加裝的設備進一步造成重心上移,在避讓轉向的過程中轉向過急過度,發生碰撞時都會比原車更容易側翻。
所以在自動駕駛中,安全是自動駕駛技術開發的第一天條。為了降低和避免實際道路測試中的風險,在實際道路測試前要做好充分的仿真、臺架、封閉場地的測試驗證。
軟件在環(Software in loop),通過軟件仿真來構建自動駕駛所需的各類場景,復現真實世界道路交通環境,從而進行自動駕駛技術的開發測試工作。軟件在環效率取決于仿真軟件可復現場景的程度。對交通環境與場景的模擬,包括復雜交通場景、真實交通流、自然天氣(雨、雪、霧、夜晚、燈光等)各種交通參與者(汽車、摩托車、自行車、行人等)。采用軟件對交通場景、道路、以及傳感器模擬仿真可以給自動駕駛的環境感知提供豐富的輸入可以對算法進行驗證和測試。
硬件在環(Hard-ware in loop),各種傳感器類似人的眼睛和耳朵,作為自動駕駛系統的感知部分,該部分的性能決定了自動駕駛車輛能否適應復雜多變的交通環境。包括,攝像頭、毫米波雷達、超聲波雷達、激光雷達。針對不同的傳感器,硬件在環會根據不同的傳感器和環境因素來部署。
車輛在環(Vehicle in loop),車輛執行系統向傳動系統發出執行命令來控制車輛,在自動駕駛中取代了人類的手腳。自動駕駛系統的執行控制優劣決定了車輛是否能夠安全舒適的行駛。車輛運行在空曠的場地上,自動駕駛系統感知系統模擬的虛擬場景,自動駕駛系統根據虛擬的場景發出控制指令,再通過傳感器將車輛的真實軌跡反饋到虛擬環境中,實現真車與虛擬環境的融合,從而進行車輛操控的驗證。
司機在環(Driver in loop),基于實時仿真技術開發,結合駕駛員的實際行為,可以實現對車輛和自動駕駛技術開發測試做出主觀的評價。司機在環,可以一方面獲得司機的主觀評價,另一方面可以驗證人機共駕駛的功能。
1.自動駕駛系統的硬件架構
就整體而言,汽車是個全社會化管理的產品,其固有的行業特點是相對保守的。在人工智能的大潮下,面對造車新勢力和消費者需求變化的沖擊,傳統汽車行業漸進式的創新方法已經面臨巨大的挑戰。急需改變傳統的架構和方法不斷創新。自動駕駛整體的硬件架構不光要考慮系統本身也要考慮人的因素。
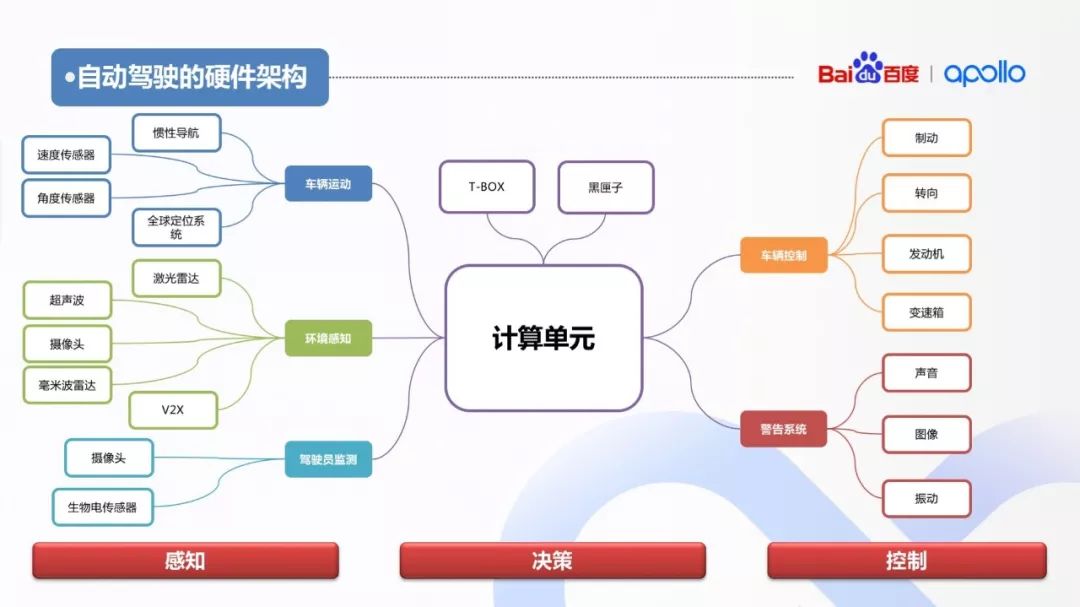
自動駕駛系統主要包含三個部分:感知、決策、控制。從整個硬件的架構上也要充分考慮系統感知、決策、控制的功能要求。整體設計和生產上要符合相關車規級標準,如ISO26262、AECQ-100、TS16949等相關認證和標準。目前L1、L2、ADAS系統的硬件架構體系和供應鏈相對完善符合車規級要求。
感知層:依賴大量傳感器的數據,分為車輛運動、環境感知、駕駛員檢測三大類。
車輛運動傳感器:速度和角度傳感器提供車輛線控系統的相關橫行和縱向信息。慣性導航+全球定位系統=組合導航,提供全姿態信息參數和高精度定位信息。
環境感知傳感器:負責環境感知的傳感器類似于人的視覺和聽覺,如果沒有環境感知傳感器的支撐,將無法實現自動駕駛功能。主要依靠激光雷達、攝像頭、毫米波雷達的數據融合提供給計算單元進行算法處理。V2X就是周圍一切能與車輛發生關的事物進行通信,包括V2V車輛通信技術、V2I與基礎設施如紅綠燈的通信技術、V2P車輛與行人的通信。
駕駛員監測傳感器:基于攝像頭的非接觸式和基于生物電傳感器的接觸式。通過方向盤和儀表臺內集成的傳感器,將駕駛員的面部細節以及心臟、腦電等部位的數據進行收集,再根據這些部位數據變化,判斷駕駛員是否處于走神和疲勞駕駛狀態。
計算單元部分:各類傳感器采集的數據統一到計算單元處理,為了保證自動駕駛的實時性要求,軟件響應最大延遲必須在可接受的范圍內,這對計算的要求非常高。目前主流的解決方案有基于GPU、FPGA、ASIC等。
車輛控制:自動駕駛需要用電信號控制車輛的轉向、制動、油門系統,其中涉及到車輛地盤的線控改裝,目前在具備自適應巡航、緊急制動、自動泊車功能的車上可以直接借用原車的系統,通過CAN總線控制而不需要過度改裝。
警告系統:主要是通過聲音、圖像、振動提醒司機注意,通過HMI的設計有效減少司機困倦、分心的行為。
2.自動駕駛的傳感器
攝像頭:主要用于車道線、交通標示牌、紅綠燈以及車輛、行人檢測,有檢測信息全面、價格便宜的特定,但會受到雨雪天氣和光照的影響。由鏡頭、鏡頭模組、濾光片、CMOS/CCD、ISP、數據傳輸部分組成。光線經過光學鏡頭和濾光片后聚焦到傳感器上,通過CMOS或CCD集成電路將光信號轉換成電信號,再經過圖像處理器(ISP)轉換成標準的RAW,RGB或YUV等格式的數字圖像信號,通過數據傳輸接口傳到計算機端。
激光雷達:激光雷達使用的技術是飛行時間法(Time of Flight)根據光線遇到障礙的折返時間計算距離。為了覆蓋一定角度范圍需要進行角度掃描,從而出現了各種掃描原理。主要分為:同軸旋轉、棱鏡旋轉、MEMS掃描、相位式、閃爍式。激光雷達不光用于感知也應用于高精度地圖的測繪和定位是公認L3級以上自動駕駛必不可少的傳感器。
毫米波雷達:主要用于交通車輛的檢測,檢測速度快、準確,不易受到天氣影響,對車道線交通標志等無法檢測。毫米波雷達由芯片、天線、算法共同組成,基本原理是發射一束電磁波,觀察回波與入射波的差異來計算距離、速度等。成像精度的衡量指標為距離探測精度、角分辨率、速度差分辨率。毫米波頻率越高,帶寬越寬,成像約精細,主要分為77GHz和24GHz兩種類型 。
組合導航:GNSS板卡通過天線接收所有可見GPS衛星和RTK的信號后,進行解譯和計算得到自身的空間位置。當車輛通過遂道或行駛在高聳的樓群間的街道時,這種信號盲區由于信號受遮擋而不能實施導航的風險。就需要融合INS的信息,INS具有全天候、完全自主、不受外界干擾、可以提供全導航參數(位置、速度、姿態)等優點,組合之后能達到比兩個獨立運行的最好性能還要好的定位測姿性能。
3.自動駕駛傳感器的產品定義

這張表總結了常見自動駕駛功能所使用的傳感器,以及各個傳感器的應用。
針對L1、L2的自動駕駛功能各國也紛紛出臺了相關標準,加速了市場的發展和產品落地。歐盟新車安全評鑒協會(E-NCAP)從 2013 年起便在評分規則中增加了ADAS內容,計劃到 2017 年速度輔助系統(SAS)、自動緊急制動 (AEB)、車道偏離預警/車道偏離輔助(LDW/LKD)的加分要求為系統,裝機量達到100%。美國國家公路交通安全管理局(NHTSA)和高速公路安全保險協(IIHS)也提出2022年將自動緊急制動(AEB)等 ADAS 功能納入技術標準。

自動駕駛要求局限于車輛的ODD(Operational Design Domain),即設計適用范圍。城市道路+城際高速是自動駕駛汽車普遍的適用范圍。我國城市封閉道路最高限速80公里/小時,高速公路限速120公里/小時。干燥的柏油路面摩擦系數是0.6,根據剎車距離公式:S=V*V/2gμ 去計算剎車距離得出第一行的表格,再結合自動駕駛系統反應時間和制動系統反應時間得出下表。
從兩個表格可以看出,剎車距離與速度的平方成正比,與摩擦系數成反比。當摩擦系數一定時,剎車距離取決于車速,如果車速增加1倍,剎車距離將增大至4倍。摩擦系數μ主要與路面材質和天氣相關。
自動駕駛傳感器在中國最高限速120公里的情況下,探測距離達到150m就可以滿足需求了,自動駕駛的技術開發者可以根據實際場景的速度來選擇所需要的傳感器,沒有必要一味追求傳感器的性能提高整體成本。
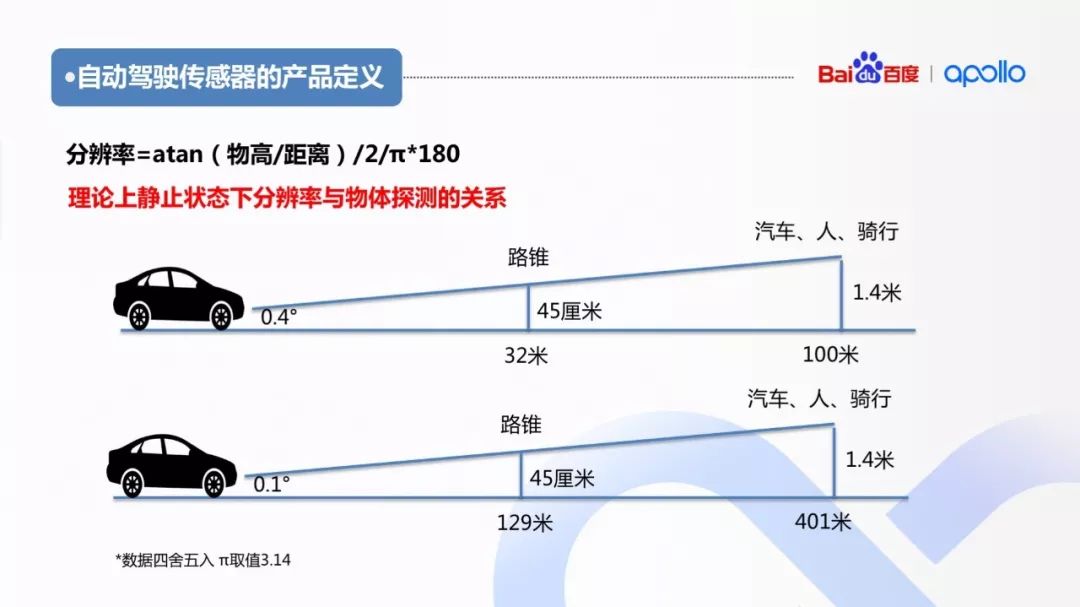
傳感器的分辨率和物體探測的關系可以用atan反正切函數來計算,圖中給出的公式多除以了個2,主要是為了保證在傳感器探測時當最小角度是最小目標一半時,任意情況都能覆蓋到某個像素保證分辨。避免物體恰好不是在一個角度內而產生漏檢。
理論上分辨率0.4度時100m外就可以探測到一輛車,而在0.1度分辨率下400m外就能探測到。但檢測只是識別到有個物體并不代表能識別,從自動駕駛的算法角度來講,比如激光雷達物體識別需要4到5條線掃描上才能識別出物體的類別。從這個角度看自動駕駛系統如果用0.4度分辨率的激光雷達在50m范圍內才能真正識別出一輛車。
自動駕駛離不了多傳感器融合,其中激光雷達和攝像頭都是光學類的傳感器,核心零部件和處理電路相似。有望將兩個傳感器前端融合到一起,直接輸出R、G、B、X、Y、Z顏色+點云融合信息。在傳感器內部實現數據融合可大幅度降低后端的計算處理量。
其中以AEye為代表 ,其iDAR智能感知系統能夠瞬間將2D真實世界的色彩信息智能地疊加在3D數據上。其動態掃描和發射圖紋技術、通過控制每束激光脈沖的掃描,可查詢每個點的三維坐標和像素。
4.自動駕駛的大腦
IPC即工業個人計算機(Industrial Personal Computer─IPC)是一種加固的增強型個人計算機,它可以作為一個工業控制器在工業環境中可靠運行。采用符合“EIA”標準的全鋼化工業機箱,增強了抗電磁干擾能力,采用總線結構和模塊化設計技術。CPU及各功能模塊皆使用插板式結構,并帶有壓桿軟鎖定,提高了抗沖擊、抗振動能力。
整體架構設計需要考慮ISO26262的要求,CPU、GPU、 FPGA以及總線都做冗余設計,防止單點故障。當整體IPC系統失效還有MCU做最后的保證,直接發送指令到車輛Can總線中控制車輛停車。
目前這種集中式的架構,將所有的計算工作統一放到一個工控機中,整體體積較大,功耗高,不適用于未來的量產。但這種架構非常方便,算法迭代不需要過度考慮硬件的整體設計和車規要求。用傳統的X86架構就可以非常快捷的搭建出計算平臺,卡槽設計也方便硬件的更新。
采用工控機集中式運算整體體積和功耗難以滿足量產化要求,需要采用域控制器嵌入式的方案。將各個傳感器的原始數據接入到Sensor Box中,在Sensor Box中完成數據的融合,再將融合后的數據傳輸到計算平臺上進行自動駕駛算法處理。
自動駕駛汽車功能復雜,保證各個模塊和功能間不互相影響和安全性考慮,將大量采用域控制器。根據不同的功能實現分為,車身域控制器、車載娛樂域控制器、動力總成域控制器、自動駕駛域控制器等。以自動駕駛域控制器為例,其承擔了自動駕駛所需要的數據處理運算力,包括毫米波雷達、攝像頭、激光雷達、組合導航等設備的數據處理,也承擔了自動駕駛算法的運算。
隨著自動駕駛的技術發展,算法不斷完善。算法固化后可以做ASIC專用芯片,將傳感器和算法集成到一起,實現在傳感器內部完成邊緣計算。進一步降低后端計算平臺的計算量,有利于降低功耗、體積、車規化。其中以Mobileye為標桿性企業。
激光雷達處理需要高效的處理平臺和先進的嵌入式軟件。如圖Renesas將包含高性能圖像處理技術及低功耗的汽車R-CarSoC與Dibotics的3D實時定位和制圖(SLAM)技術相結合,提供SLAM on Chip?。SLAM可在SoC上實現高性能所需的3D SLAM處理。Dibotics公司也開發了一款名為“Augmented LiDAR”的嵌入式LiDAR軟件,能夠提供實時、先進的LiDAR數據處理。
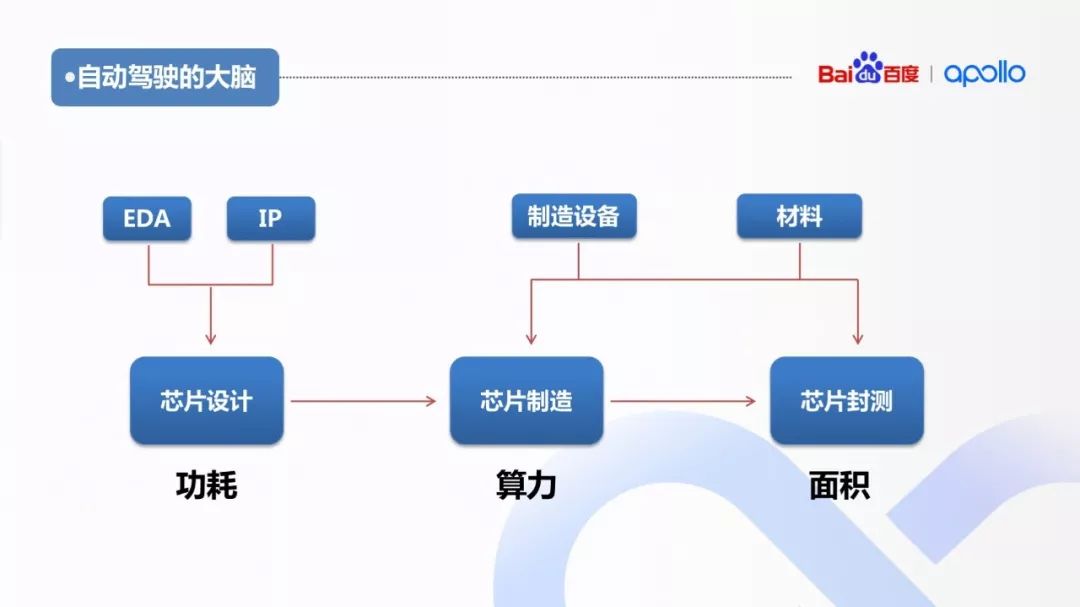
ASIC芯片是根據某類特定的需求去專門定制的芯片,比通用性的GPU、FPGA體積小、功耗低,性能穩定批量化成本低的特定。自動駕駛的算法公司只要做好芯片的前端設計,后端的制造和工藝都是非常成熟的產業,完全可以依靠外包實現。
前端設計完成之后,可以根據實際算法需求選擇IP核通過EDA(電子設計自動化)完成布圖規劃、布局、布線。根據延遲、功耗、面積等方面的約束信息,合理設置物理設計工具的參數,以獲取最佳的配置從而決定元件在晶圓上的物理位置。
芯片制造工藝上正從193nm深紫外(DUV)向13.5nm極紫外(EUV)發展。半導體正步入7nm時代,更先進的工藝帶來性能上的提升,對比16nm工藝7nm可提升40%的性能和節省60%的能耗。
芯片封測是指將通過測試的晶圓按照產品型號及功能需求加工得到獨立芯片的過程。在封測的過程中完成對芯片車規級要求,傳統的汽車電子企業如NXP和ST有著更加豐富的經驗。
5.自動駕駛汽車的線控系統
線控就是Control by Wire的直譯 。簡單理解,就是車輛的控制都是由一系列命令而執行的,而不是物理的操作進行執行的。
自動駕駛主要分為感知、決策、控制三部分,控制層是自動駕駛落地的基礎。感知定位如同司機的眼睛,決策規劃如同大腦,執行控制就好比手和腳了。做好自動駕駛的決策規劃也必須懂得執行控制,為了實現自動駕駛,執行機構的線控化是必然趨勢,其中包括線控制動、線控轉向、線控油門。
在傳統車輛上,制動系統多采用液壓或真空伺服機構來控制制動,對自動駕駛而言,線控制動是最終的發展趨勢,線控制動是以電子系統取代液壓或氣壓控制單元。
上圖是大陸的線控制動解決方案,MK C1與MK100組成冗余線控方案。MK C1將制動助力以及制動壓力控制模塊(ABS、ESC)被集成為一個結構緊湊、重量輕省的制動單元。MK C1能滿足自動駕駛對壓力動態特性更高的要求,電觸發的緊急制動所產生的制動距離要短得多。
MK100是大陸的汽車電子穩定控制系統(ESC),在汽車防抱死制動系統(ABS)和牽引力控制系統(TCS)功能的基礎上,增加了車輛轉向行駛時橫擺率傳感器、測向加速度傳感器和方向盤轉角傳感器,通過ECU控制前后、左右車輪的驅動力和制動力,確保車輛行駛的側向穩定性。
電子助力轉向(EPS)與線控轉向最大的區別在于,EPS方向盤與車輪之間鏈接并未參與線控技術,依然采用的機械鏈接。從電信號控制角度看EPS也可以看成是一種線控轉向系統。
英菲尼迪Q50線控主動轉向系統基本上還是延續了傳統轉向系統的結構。只是增加了一套離合器裝置以及三組ECU電子控制單元和一個轉向力度回饋器。當車輛啟動時,離合裝置會自動切斷連接,轉向的任務交由電控系統。由于采用電子信號控制,其傳動響應更為迅速,也更為輕松。
線控油門就是電子油門,通過位置傳感器傳送油門踩踏深淺與快慢的訊號 ,從而實現油門功能的電子控制裝置。這個訊號會被ECU接收和解讀,然后再發出控制指令 ,要節氣門依指令快速或緩和開啟它應當張開的角度。這個過程精準而快速。不會有機械磨耗的問題。
電子油門目前已大量普及,凡具備定速巡航即可認定有電子油門,早期電子油門為接觸式,近來已經改為非接觸式。電車依靠電機扭矩實現,直接發扭矩信號即可,油車依靠發動機管理系統(EMS)發扭矩信號實現。
轉向的最早改裝是在轉向管柱端截斷加裝轉向電機進行改造。之后利用原車轉向助力系統進行轉向控制。
制動的最早改裝是加裝電機踏板,后續利用原車的ESC系統進行控制,未來會選用MK C1之類的線控控制系統。
加速的最早改裝都是發扭矩信號依靠EMS實現,后續的改裝方案都是借用原車ACC接口由電子油門來執行。
自動駕駛面向量產的線控方案,可以參考英菲尼迪Q50的線控轉向、大陸MK100+MK C1的線控制動來實現。由自動駕駛域控制器直接輸出電機扭矩/制動壓力信號給轉向剎車的執行機構,結合大量的測試標定實現精準控制,從而給司乘人員帶來完美的體感舒適度。
從VSI發布自動駕駛產業布局圖中可以看出自動駕駛產業,是汽車、新能源、IT通訊、交通運輸、半導體、人工智能、互聯網等多個10萬億巨無霸產業的跨界融合體。自動駕駛汽車是物質流、能量流、信息流的聚合體,需要行業各方深度合作,只有軟硬件深度整合,打通藩籬跨界的企業才能摘得皇冠上的明珠。
本次分享的部分內容參考了我參與撰寫的《智能汽車:決戰2020》一書,內容涵蓋技術到實戰、政策到市場、創業到投資,并對全產業鏈進行了全貌梳理。
-
硬件系統
+關注
關注
0文章
48瀏覽量
11364 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166388
原文標題:自動駕駛汽車硬件系統概述
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論